Author: Denis Avetisyan
A new robotic platform dramatically accelerates the development of resilient soft actuators, paving the way for more robust and adaptable robotic systems.
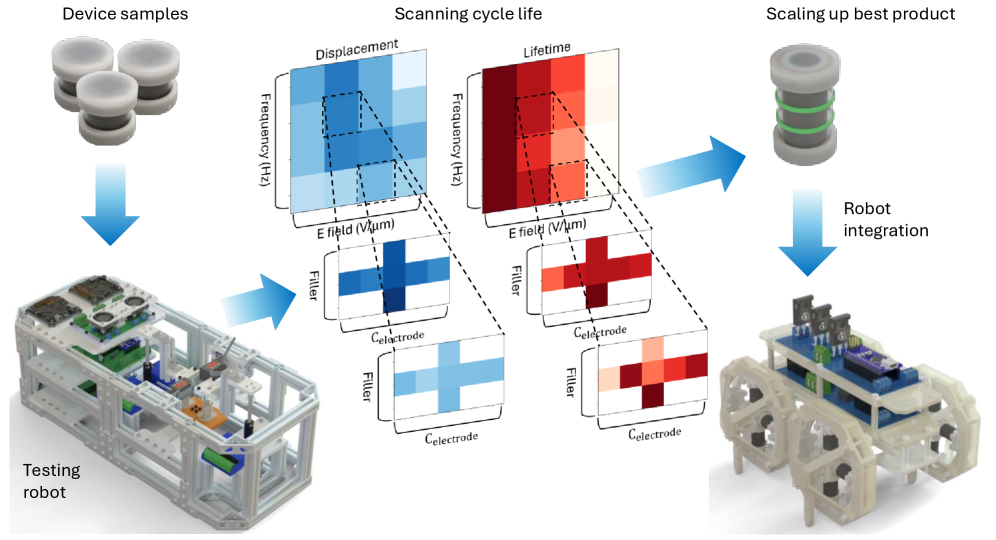
Researchers detail an automated, high-throughput testing pipeline for optimizing the lifetime and performance of dielectric elastomer actuators.
Despite the promise of soft robotics, the limited operational lifetime of dielectric elastomer actuators (DEAs) restricts their widespread adoption. This work introduces ‘A Robotic Testing Platform for Pipelined Discovery of Resilient Soft Actuators’, an automated, high-throughput system designed to accelerate the optimization of DEA durability across multi-dimensional parameter spaces. We demonstrate a 100% improvement in actuator lifetime under stress via robotic scanning, subsequently achieving robust performance-including payload capacity exceeding both body weight and actuator weight-in a quadrupedal walking robot. Could this self-driving lab approach redefine the design paradigm for resilient soft robotic systems and unlock their full potential?
Beyond Rigid Systems: The Promise of Compliant Robotics
Conventional robotics, reliant on rigid materials and powerful motors, frequently struggles when interacting with unpredictable or delicate surroundings. These systems, while precise, often lack the inherent compliance needed to safely navigate complex environments or handle fragile objects. A robotic arm designed for assembly line work, for instance, may exert excessive force during contact, potentially damaging the parts it’s intended to manipulate. This inflexibility stems from the actuators themselves – the ‘muscles’ of the robot – which prioritize strength and positioning over adaptability. Consequently, applications in fields like minimally invasive surgery, search and rescue, or even human-robot collaboration are severely limited, necessitating a shift towards robotic systems capable of gentler, more nuanced interactions.
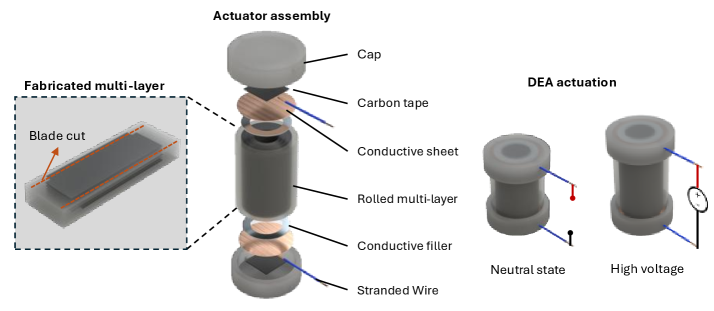
Unlike conventional robotics reliant on rigid components and discrete movements, soft robotics utilizes highly compliant materials – notably dielectric elastomers – to achieve remarkably nuanced and adaptable motion. These elastomers, when subjected to an electric field, undergo significant deformation, enabling actuators to bend, stretch, contract, and twist in ways that mimic natural systems. This approach allows for the creation of robots capable of delicate interactions with fragile objects, navigating complex terrains, and even functioning within confined spaces. The inherent compliance also enhances safety, as impacts are absorbed rather than rigidly resisted, making these actuators particularly promising for applications in healthcare, search and rescue, and human-robot collaboration. This ability to replicate the flexibility and dexterity of living organisms represents a paradigm shift in robotic design, opening doors to entirely new functionalities and operational environments.
Despite the promise of dielectric elastomer actuators and other soft robotic components, substantial hurdles remain before they can consistently perform in demanding applications. Current iterations often exhibit diminished performance over time, with material fatigue and degradation limiting operational lifespan. This isn’t simply a matter of the actuator failing after a set number of cycles; nuanced performance characteristics – such as force output, speed, and precision – tend to degrade concurrently with physical wear. Addressing these limitations requires innovation in materials science, focusing on enhancing durability and resistance to environmental factors. Furthermore, improvements in actuator design and control algorithms are crucial to mitigate stress concentrations and optimize operational parameters, ultimately extending functional longevity and realizing the full potential of soft robotics in complex and dynamic environments.
Assessing the longevity of soft robotic actuators through traditional ‘cycle life’ testing – simply counting how many bending or stretching motions a device can perform before failure – provides a drastically incomplete picture of real-world performance. This metric fails to account for the complex, multi-faceted degradation that occurs with these materials, overlooking factors like subtle changes in material properties, creep under sustained loads, or the impact of varying environmental conditions. A soft actuator used in a search-and-rescue operation, for example, won’t experience a purely cyclical load; it will likely hold positions for extended periods, encounter unpredictable obstacles, and operate in fluctuating temperatures and humidity. Consequently, relying solely on cycle counts can lead to overly optimistic predictions of lifespan and ultimately, unreliable robotic systems; a more holistic evaluation encompassing performance decay under realistic, varied conditions is crucial for building truly robust and dependable soft robots.
Material Precision: Controlling Performance Through Composition
Dielectric Elastomer Actuator (DEA) performance is intrinsically linked to both material composition and fabrication processing conditions. The selection of the elastomer base material – encompassing its dielectric constant, loss modulus, and breakdown strength – directly impacts achievable strain and force output. Furthermore, variations in processing parameters such as pre-stretch ratio, curing temperature, and electrode deposition method influence the material’s homogeneity, defect density, and ultimately, its operational lifespan. Precise control over these factors is crucial, as even minor deviations can significantly alter the DEA’s electromechanical properties and long-term reliability; for example, inconsistencies in film thickness or the introduction of voids during processing can create stress concentrations leading to premature failure.
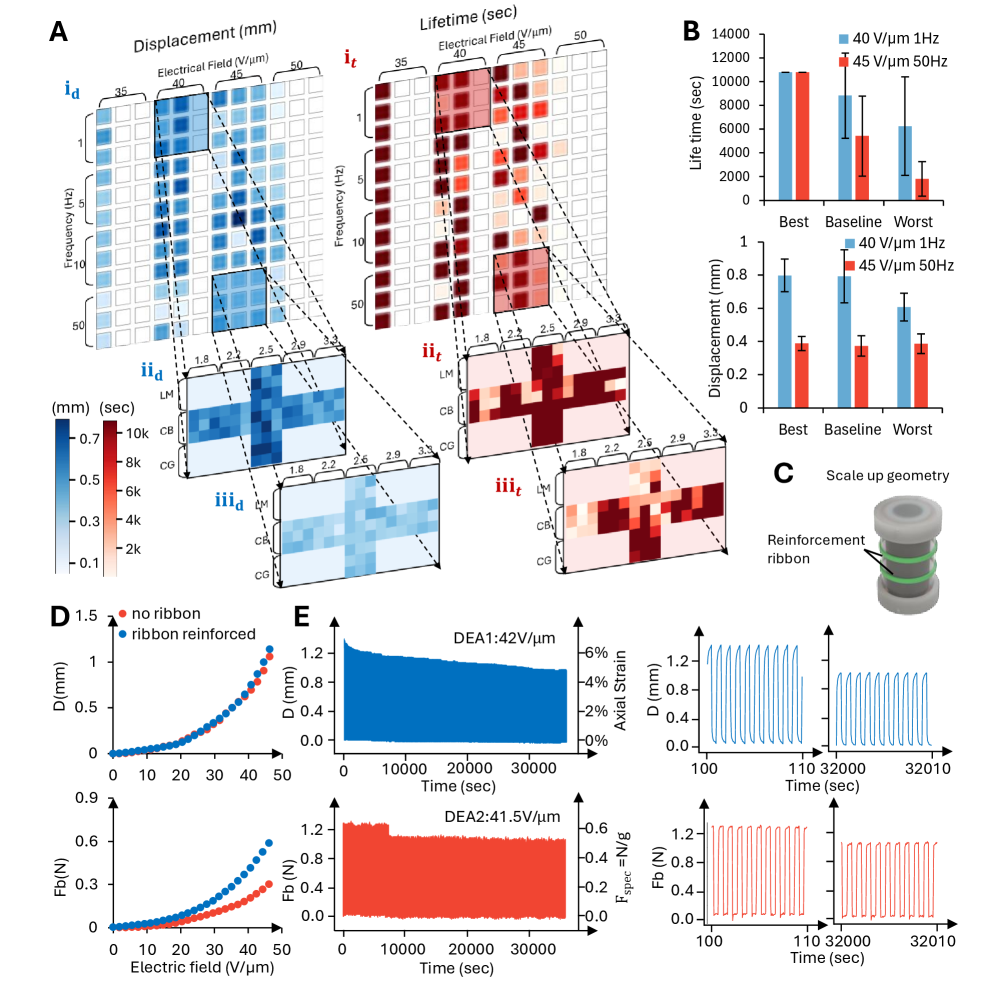
Optimization of DEA electrode materials is critical for achieving enhanced performance and longevity. Current research indicates that incorporating conductive fillers, specifically carbon nanotubes, significantly improves these characteristics. Material scans conducted on various DEA compositions demonstrate a 500% increase in operational lifetime when utilizing materials with carbon nanotube inclusions, compared to standard electrode materials. This improvement is attributed to enhanced conductivity, reduced electrode resistance, and improved mechanical stability, ultimately extending the functional lifespan of the dielectric elastomer actuator.
Dielectric elastomer actuator (DEA) performance is quantitatively linked to externally applied stimuli. Increasing the strength of the electric field – measured in volts per micron – directly correlates with increased strain, up to the elastomer’s dielectric breakdown limit. Simultaneously, the actuation frequency, typically ranging from sub-Hertz to several kilohertz, influences the actuator’s response time and power consumption; higher frequencies generally yield faster response but require increased energy input. Material testing indicates an inversely proportional relationship between frequency and achievable strain for a fixed voltage, necessitating careful optimization of both parameters to maximize work output and operational lifespan.
Data-Driven Refinement: A System for Accelerated Optimization
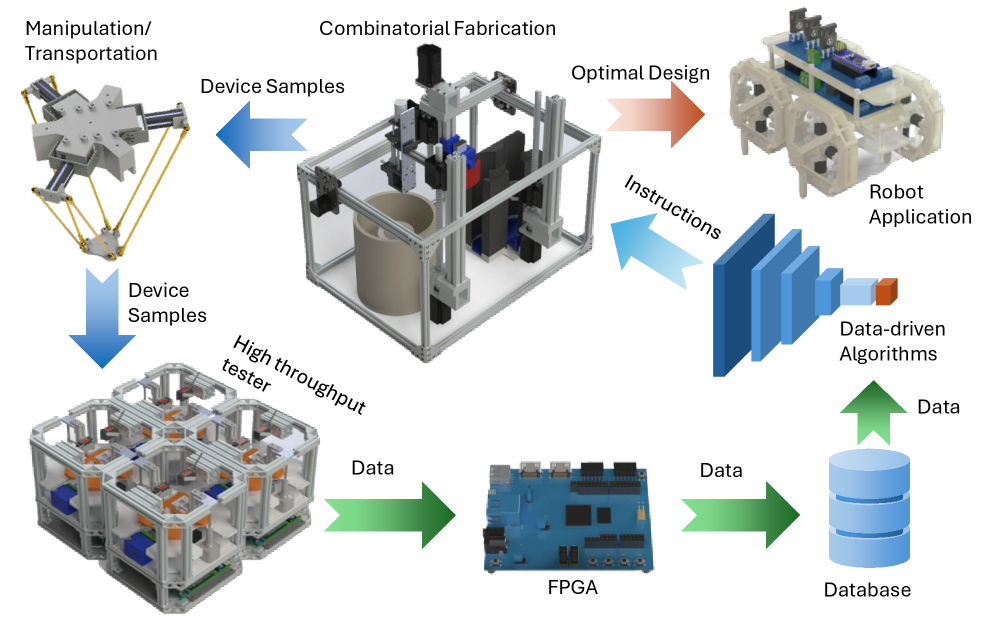
A robotic testing platform was developed to facilitate high-throughput lifetime testing of dielectric elastomer actuators (DEAs). This platform integrates robotic manipulation for automated cycling of the DEAs with Field-Programmable Gate Array (FPGA)-based data acquisition systems. The FPGA infrastructure enables synchronized, high-speed measurement of critical DEA performance parameters during operation. This combination of automated mechanics and rapid data acquisition allows for a significantly increased testing rate and the collection of large datasets necessary for statistically relevant lifetime analysis, exceeding the capabilities of traditional manual testing procedures.
The Robotic Testing Platform facilitates the systematic collection of performance data from Dielectric Elastomer Actuators (DEAs) under a range of operational parameters, including frequency, voltage, and temperature. This data encompasses metrics beyond simple failure points, such as changes in capacitance, displacement, and response time, allowing for detailed analysis of degradation mechanisms. The resulting datasets are then utilized in a Data-Driven Optimization process, employing statistical modeling and machine learning algorithms to identify optimal material compositions and configurations. This iterative process enables the refinement of DEA designs to maximize longevity and performance, moving beyond empirical testing to a predictive and targeted optimization strategy.
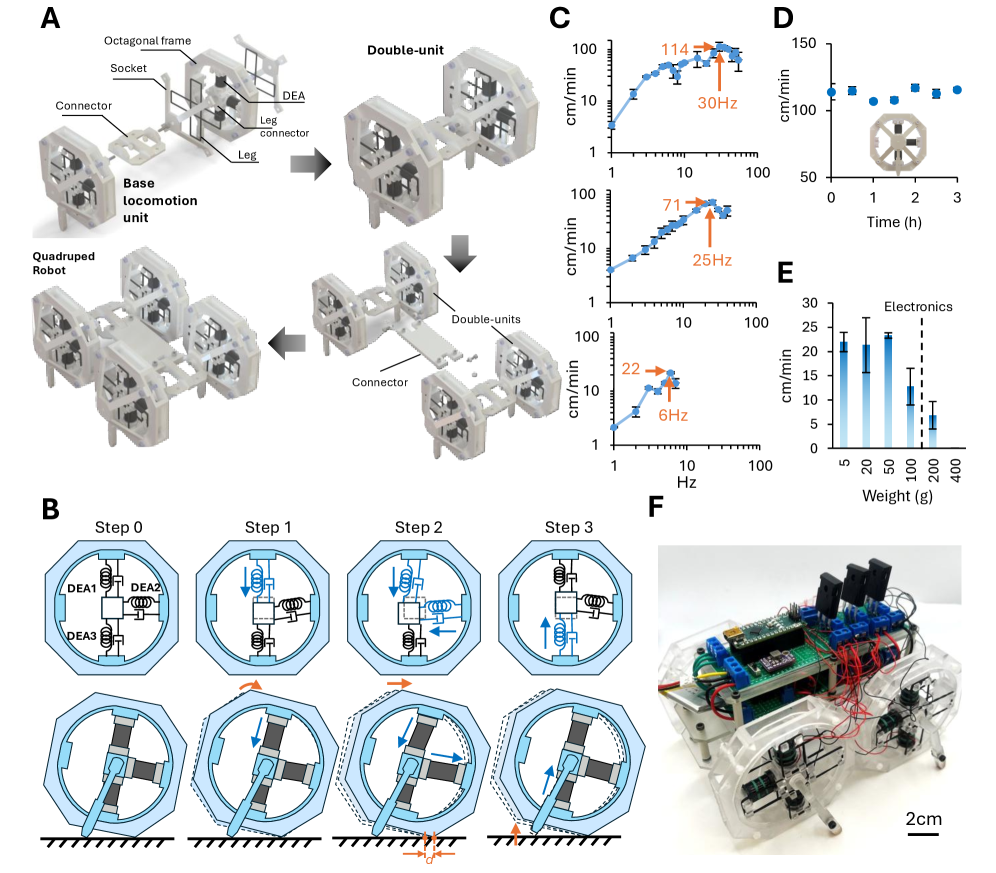
Traditional DEA lifetime assessment relies on tracking ‘Cycle Life’, which simply quantifies the number of operational cycles before failure. This metric provides limited insight into performance degradation. Our methodology utilizes a more comprehensive ‘Lifetime (Metric)’ that evaluates sustained performance characteristics over time, allowing for the identification of subtle degradation patterns. Implementation of this metric, coupled with robotic testing, yielded a 22% improvement in lifetime at 1 Hz and a 99% improvement at 50 Hz for the optimal material configuration, as compared to baseline performance. These gains demonstrate the efficacy of data-driven optimization using a performance-based lifetime assessment.
Embodied Intelligence: A Quadruped Platform Demonstrates Practicality
The culmination of this research involved integrating the newly optimized linear dielectric elastomer actuators (DEAs) into a fully functional quadruped robot. This physical embodiment served as a critical demonstration of the actuator’s practical utility, moving beyond simulations and theoretical performance. The robot successfully achieved stable locomotion across various terrains, showcasing the DEA’s capacity to deliver consistent and reliable movement. Crucially, the platform also proved its ability to carry substantial payloads – exceeding its own body weight by over 100% and demonstrating a remarkable 700% payload capacity relative to the weight of the actuators themselves. This feat highlights not only the actuators’ inherent strength but also their potential for deployment in applications demanding significant load-bearing capabilities, opening avenues for robotic systems designed for delivery, surveillance, and even assistance in challenging environments.
The successful integration of dielectric elastomer actuators (DEAs) into a quadruped robot signifies a substantial step towards realizing their potential beyond laboratory settings. This platform demonstrably overcomes a key hurdle for soft robotics – practical load-bearing capacity. The robot’s ability to carry a payload exceeding its own weight, and an impressive 700% of the actuator’s weight, highlights the actuators’ robust performance and opens doors for applications requiring significant strength-to-weight ratios. This capability suggests DEAs are not merely a novelty, but a viable technology for tasks ranging from logistical support and search-and-rescue operations to advanced prosthetics and biomimetic robotics, proving their adaptability and potential for widespread use.
The implementation of a closed-loop system proved critical in maximizing the performance and longevity of the dielectric elastomer actuators (DEAs) within the quadruped robot. This system continuously monitors key parameters – such as actuator strain, force, and environmental conditions – and dynamically adjusts control signals in real-time. By responding to variations and imperfections inherent in both the actuators and the operational environment, the closed-loop control mitigates potential instabilities and prevents premature failure. This adaptive approach not only enhances the robot’s ability to maintain balance and carry substantial payloads, but also significantly extends the operational lifespan of the DEAs themselves, paving the way for more robust and reliable soft robotic systems.
The pursuit of resilient soft actuators, as detailed in this work, demands a holistic approach to experimentation and design. The robotic testing platform represents a shift towards understanding actuator lifetime not as an isolated property, but as an emergent behavior of the entire system. This mirrors the sentiment expressed by Marvin Minsky: “The more we learn about intelligence, the more we realize how much of it is just clever hacking.” The platform’s automated pipeline, constantly probing and refining actuator designs, is a form of ‘clever hacking’ – systematically exploring the design space to discover solutions that maximize durability. It acknowledges that true resilience isn’t found in single, perfect materials, but in the intelligent orchestration of components and processes. Good architecture is invisible until it breaks, and only then is the true cost of decisions visible.
The Road Ahead
The presented robotic testing platform, while a significant step towards automated materials discovery, merely illuminates the scale of the challenge. The pursuit of resilient dielectric elastomer actuators is not simply a materials problem; it’s a systems problem. Each optimization – extending lifetime, increasing strain, reducing voltage – introduces new dependencies, new failure modes. Every new dependency is the hidden cost of freedom. The platform’s efficacy hinges on the fidelity of its models, and those models, inevitably, are abstractions of a complex reality.
Future work must address the limitations inherent in high-throughput experimentation. The current approach excels at mapping performance landscapes, but offers little intrinsic insight into why certain materials fail. Integrating in-situ diagnostics-observing the microscopic mechanisms of degradation-is crucial. Moreover, a truly adaptive pipeline would not merely test variations, but actively design new materials, guided by Bayesian optimization and informed by the very failures it observes.
The long-term trajectory lies in closing the loop: a self-driving laboratory capable of autonomous material design, fabrication, testing, and analysis. Such a system, however, demands a fundamental shift in perspective-from treating actuators as isolated components to recognizing them as integral parts of a larger, dynamic organism. The structure dictates behavior, and only a holistic understanding will yield truly resilient soft robots.
Original article: https://arxiv.org/pdf/2602.20963.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-02-25 16:58