Author: Denis Avetisyan
A new framework prioritizes user needs – safety, privacy, and comfort – to pave the way for seamless and trustworthy robotaxi experiences.
This review outlines a user-driven design framework for robotaxis, synthesized from interviews and autoethnographic research focusing on human-machine interaction.
While autonomous vehicle technology rapidly advances, understanding passenger experience remains surprisingly underexplored. This is addressed in ‘A User-driven Design Framework for Robotaxi’ through an investigation of real-world robotaxi use, combining semi-structured interviews and autoethnographic experiences to reveal user expectations around safety, privacy, and trust. Findings indicate passengers value agency and consistency, yet express concerns regarding flexibility, transparency, and handling of edge cases-highlighting a nuanced interplay between perceived benefits and practical challenges. How can these insights inform the design of robotaxi services that prioritize user needs and foster widespread adoption?
Reimagining Mobility: Addressing the Strain on Modern Transportation
Contemporary transportation systems are increasingly strained by the demands of growing populations and urbanization, revealing critical shortcomings in efficiency, accessibility, and environmental sustainability. Traditional models, reliant on personal vehicle ownership and fossil fuels, contribute significantly to traffic congestion, air pollution, and limited mobility for certain demographics. The current paradigm often necessitates substantial infrastructure investments – roads, parking facilities – that consume valuable land and resources. These systemic challenges necessitate a fundamental reimagining of how people and goods move, prompting exploration of innovative solutions like shared mobility, electric vehicles, and, increasingly, fully autonomous transportation networks designed to optimize resource utilization and reduce the overall ecological footprint.
Robotaxi services represent a potentially transformative shift in how people and goods move within urban environments. This vision centers on fleets of autonomous vehicles accessible on demand through smartphone applications, mirroring current rideshare models but eliminating the cost of a human driver. Proponents suggest this could drastically reduce transportation expenses, increase accessibility for those unable to drive, and alleviate congestion through optimized routing and ‘platooning’ – where vehicles travel closely together to minimize drag and maximize road capacity. Beyond personal transport, robotaxis also offer logistical solutions for last-mile delivery, potentially streamlining supply chains and reducing carbon emissions. While challenges related to regulation, infrastructure, and public acceptance remain, the core promise of on-demand, automated mobility positions robotaxis as a key component in the future of urban transportation systems.
The widespread adoption of robotaxi services isn’t simply a technological hurdle, but a matter of building public trust and delivering a consistently positive experience for passengers. Beyond the engineering feats of autonomous navigation, successful integration demands meticulous attention to passenger comfort, vehicle cleanliness, and seamless ride requests. Concerns surrounding safety – both real and perceived – must be proactively addressed through rigorous testing, transparent data sharing regarding incident rates, and robust system redundancies. Reliability is equally crucial; unpredictable service, lengthy wait times, or frequent rerouting will quickly erode public confidence. Ultimately, the future of robotaxis depends not just on if they can drive themselves, but on whether passengers will choose to ride in them, prioritizing a journey that feels secure, convenient, and enjoyable.
The Architecture of Autonomy: Core Technologies Enabling Robotaxi Operation
The Automated Driving System (ADS) constitutes the core technology enabling robotaxi operation, encompassing a suite of hardware and software components that perform all driving tasks without human intervention. This system relies on sensor fusion, integrating data from LiDAR, radar, cameras, and ultrasonic sensors to create a comprehensive understanding of the vehicle’s surroundings. Perception algorithms process this sensor data to identify and classify objects, predict their behavior, and map the environment. Path planning and control modules then utilize this information to determine the optimal route and execute driving maneuvers, adhering to traffic laws and ensuring passenger safety. Redundancy in both hardware and software is critical within the ADS to maintain operational capability in the event of component failure, and the system is continuously updated through over-the-air software updates to improve performance and expand operational design domains.
Context-Aware Pickup and Dynamic Route Adjustment are core functionalities employed by robotaxi services to enhance operational efficiency and passenger comfort. Context-Aware Pickup utilizes real-time data – including pedestrian and traffic patterns, weather conditions, and vehicle availability – to determine the optimal, safest, and most convenient passenger pick-up location, potentially differing from the originally requested address. Dynamic Route Adjustment continuously monitors traffic congestion, road closures, and other disruptive events, recalculating the route during the ride to minimize travel time and ensure on-time arrival at the destination; this process leverages predictive analytics to anticipate potential delays and proactively reroute the vehicle, improving overall service reliability.
Pre-Ride Configuration within robotaxi services enables passengers to customize several aspects of the in-vehicle environment before the journey begins. These configurable elements typically include climate control settings – temperature and fan speed – as well as preferred audio sources and volume levels. Passengers can also select desired ambient lighting and, in some implementations, specify ride preferences such as a ‘quiet mode’ which minimizes in-vehicle announcements and optimizes suspension for a smoother experience. This personalization is generally facilitated through a mobile application interface, allowing settings to be saved as profiles for consistent application across multiple rides and vehicles.
Fostering Trust Through Transparency: Ensuring Safety in Autonomous Vehicles
Trust calibration in autonomous vehicle passenger experience refers to the process of aligning a rider’s expectation of system capabilities with the actual performance demonstrated during operation. Perceived safety is not solely determined by objective safety metrics, but critically by the passenger’s subjective assessment of the vehicle’s actions and predictability. Research indicates a strong correlation between calibrated trust – where passenger belief in the system matches its demonstrated competence – and acceptance of the technology; overestimation of capabilities can lead to complacency and reduced monitoring, while underestimation results in anxiety and a reluctance to utilize autonomous functions. Effective trust calibration requires consistent, understandable communication of system status and intent, allowing passengers to form accurate mental models of the vehicle’s behavior and fostering a sense of control, even during fully autonomous operation.
Real-time system disclosure in autonomous vehicles involves continuously communicating the vehicle’s operational status to passengers. This includes conveying information regarding sensor perception – identifying detected objects like pedestrians, cyclists, and other vehicles – planned maneuvers, and the rationale behind those decisions. Data presented can include the confidence level of object detection, the status of critical systems such as braking and steering, and the vehicle’s understanding of its surrounding environment. Research indicates that providing this level of transparency reduces passenger anxiety by fostering a sense of predictability and control, allowing occupants to better anticipate vehicle actions and understand how the system is responding to dynamic conditions. The implementation typically involves visual displays and/or auditory cues to deliver information in a readily understandable format.
Remote assistance systems in autonomous vehicles utilize teleoperation and real-time data connection to human agents who can intervene when the vehicle encounters situations beyond its operational design domain. These situations include unexpected road closures, complex traffic scenarios, system failures, or requests from passengers for assistance. Remote operators can assess the situation via onboard sensors – including cameras, lidar, and radar – and provide guidance, initiate a minimal risk maneuver, or, if necessary, remotely control the vehicle to a safe stop. The effectiveness of remote assistance is dependent on low-latency, high-bandwidth communication networks and robust cybersecurity measures to prevent unauthorized access or control. Furthermore, clearly defined protocols are required to delineate the roles and responsibilities of the autonomous system and the remote operator during intervention scenarios.
Designing for the Passenger: The Evolving In-Vehicle Experience
Recent research indicates robotaxis are uniquely perceived not as fully public transport, nor entirely private vehicles, but as semi-private transitional spaces – temporary environments where individuals willingly relinquish a degree of personal space while maintaining expectations of comfort and control. This concept, rooted in environmental psychology, suggests passengers view the robotaxi as a buffer between their origin and destination, a space for mentally preparing for their next activity or unwinding from the previous one. The study highlights how this perception fundamentally shapes the in-vehicle experience, influencing passenger behavior, expectations regarding personal space, and openness to in-vehicle services. Understanding this nuanced categorization is crucial for designers and developers aiming to optimize robotaxi interiors, digital interfaces, and overall service offerings, as passengers subconsciously assess the vehicle based on its suitability as this temporary, semi-private realm.
The In-Vehicle Experience extends far beyond mere transportation; it’s a holistic encounter shaped by the vehicle’s role as a temporary environment. Research indicates that every sensory input – from ambient lighting and seat comfort to the sounds and temperature within the cabin – contributes to the passenger’s emotional state and overall perception of the journey. This encompasses not only visual and auditory stimuli, but also tactile sensations, even olfactory elements, all coalescing to create a subjective experience. Consequently, positive or negative feelings generated during the ride significantly influence perceptions of the robotaxi service itself, impacting future usage and brand loyalty. A carefully curated In-Vehicle Experience, therefore, isn’t simply about comfort, but about strategically designing a space that fosters positive emotions and enhances the perceived value of autonomous transportation.
The integration of an In-Vehicle AI Companion is poised to redefine the passenger experience within autonomous vehicles. Beyond simply transporting individuals, these AI systems function as proactive co-pilots, offering assistance with tasks ranging from climate control and route adjustments to providing real-time traffic updates and points of interest. Furthermore, the companion’s ability to deliver personalized entertainment – curated music, podcasts, or even interactive games – transforms travel time into a valuable and enjoyable segment of the day. This isn’t merely about convenience; it’s about crafting a journey that is both efficient and emotionally satisfying, ultimately fostering a sense of calm and productivity even amidst the complexities of modern transportation. The AI companion, therefore, is central to establishing a positive and memorable In-Vehicle Experience.
Continuous Refinement: The Power of Passenger Feedback in Autonomous Systems
A robust post-ride feedback system forms the cornerstone of a successful robotaxi service, enabling the collection of nuanced data regarding passenger experiences. Beyond simple satisfaction scores, these systems capture specific details about each stage of the journey – from the initial hailing process to the final drop-off – revealing pain points and areas for optimization. This continuous stream of insights allows developers to move beyond theoretical design and directly address passenger needs, iteratively refining the service based on real-world usage. Effectively, the feedback loop transforms each ride into an opportunity for improvement, ensuring the robotaxi adapts to user expectations and delivers a consistently positive experience, ultimately fostering trust and widespread adoption of this emerging technology.
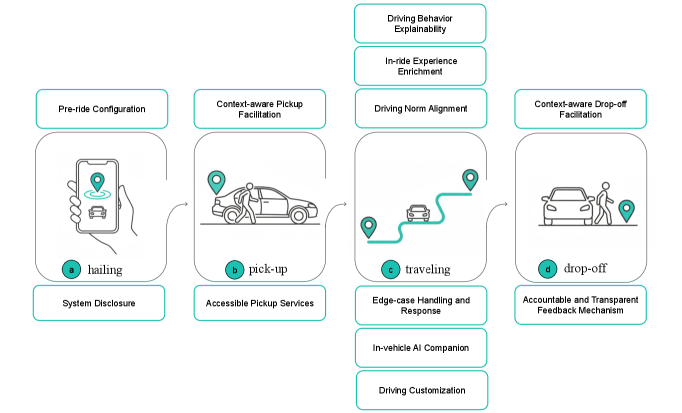
A recent study, incorporating insights from 18 participants alongside autoethnographic observation, demonstrates the power of passenger feedback in refining robotaxi services. Analysis of this feedback reveals opportunities for iterative improvement across four key stages of the rider experience: hailing the vehicle, the pick-up process, the journey itself, and the final drop-off. By systematically addressing concerns and suggestions gathered from users at each of these touchpoints, developers can optimize the entire service, enhancing comfort, efficiency, and overall satisfaction. This focused approach allows for targeted adjustments – from app interface improvements during hailing to refined navigation during travel – ultimately leading to a more user-centric and effective autonomous transportation system.
The true promise of robotaxi services hinges on a deep understanding of passenger requirements, moving beyond mere technological feasibility to genuine usability and acceptance. Prioritizing these needs – encompassing everything from seamless hailing and comfortable travel to precise drop-off and a sense of security – isn’t simply about enhancing customer satisfaction; it’s about fundamentally reshaping urban mobility. When robotaxis consistently deliver positive, passenger-centric experiences, they offer a compelling alternative to private vehicles, potentially alleviating congestion, reducing parking demands, and expanding transportation access for diverse populations. This shift necessitates continuous refinement based on real-world feedback, ultimately unlocking the potential for a truly revolutionary and integrated transportation ecosystem that benefits both individuals and cities.
The presented framework emphasizes a holistic understanding of the robotaxi experience, moving beyond purely technical considerations to address user needs surrounding safety and, crucially, trust. This approach aligns with the sentiment expressed by Marvin Minsky: “You can’t swing a dead cat in this business without bumping into a problem.” The complexity of designing for autonomous systems necessitates acknowledging the interconnectedness of various factors – from ensuring data privacy to building passenger confidence. A successful robotaxi isn’t simply about efficient transportation; it’s about crafting an experience where users implicitly trust the system’s judgment, demanding an understanding of the whole rather than isolated feature fixes. The study’s focus on autoethnographic research demonstrates a commitment to uncovering these nuanced user expectations, recognizing that true innovation arises from deeply understanding the context of use.
The Road Ahead
The presented framework, while grounded in valuable user-centric research, highlights a familiar pattern: the initial articulation of need often proves simpler than the systemic consequences of its fulfillment. Focusing on safety, privacy, and trust is essential, yet these are not isolated variables. Each is inextricably linked to the operational architecture of the robotaxi system itself-the data flows, the decision-making algorithms, and the inevitable trade-offs between convenience and security. A truly robust solution will not merely address these concerns; it will design them into the foundational structure.
Future work must move beyond identifying user expectations to modeling the long-term behavioral effects of widespread autonomous vehicle adoption. The framework rightly emphasizes the importance of human-machine interaction, but interaction is a surface phenomenon. The deeper question concerns the subtle ways in which these systems reshape user behavior, potentially creating new dependencies and unforeseen vulnerabilities. Simplicity in the interface will prove a poor substitute for systemic transparency.
Ultimately, the true cost of this technology will not be measured in dollars, but in the erosion-or preservation-of individual agency. The pursuit of convenience should not be mistaken for progress if it arrives at the expense of genuine control. The challenge, then, is not simply to build a robotaxi, but to architect a transportation ecosystem that aligns with fundamental human values-a deceptively difficult task, given that those values are rarely explicitly stated, and often self-contradictory.
Original article: https://arxiv.org/pdf/2602.19107.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- ‘Project Hail Mary’s Unexpected Post-Credits Scene Is Worth Sticking Around
- Total Football free codes and how to redeem them (March 2026)
- Limbus Company 2026 Roadmap Revealed
- The Division Resurgence Specializations Guide: Best Specialization for Beginners
- After THAT A Woman of Substance cliffhanger, here’s what will happen in a second season
- Brawl Stars Sands of Time Brawl Pass brings Sandstalker Lily and Sultan Cordelius sets, along with chromas and more
- Brawl Stars Brawl Cup Pro Pass arrives with the Dragon Crow skin and Chroma, unique cosmetics, and more rewards
- Clash of Clans April 2026 Gold Pass Season introduces a Archer Queen skin
- Wuthering Waves Hiyuki Build Guide: Why should you pull, pre-farm, best build, and more
- XO, Kitty season 3 soundtrack: The songs you may recognise from the Netflix show
2026-02-24 15:41