Author: Denis Avetisyan
New research details how information propagates through robot swarms relying solely on direct, opportunistic communication between individuals.
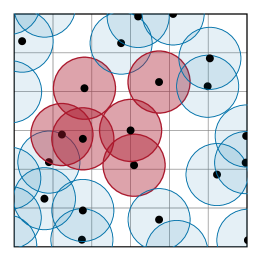
![The study demonstrates that the interaction interval within a robotic swarm is governed by a relationship between the number of robots ([latex] NN [/latex]), communication range ([latex] CC [/latex]), and the dimensions of the operational environment ([latex] LL [/latex]), all considered in relation to the robots’ velocity ([latex] vv [/latex]), as evidenced by reported means and inter-quartile ranges.](https://arxiv.org/html/2602.21148v1/x4.png)
A novel micro-macro model reveals a transition between logistic and Gompertz diffusion dynamics in encounter-driven robot swarms, influenced by communication density and mean free path.
Efficient information sharing is often hindered in multi-robot systems lacking centralized control or pre-planned communication schedules. This paper, ‘A Micro-Macro Model of Encounter-Driven Information Diffusion in Robot Swarms’, addresses this challenge by presenting a novel model that captures the dynamics of information spread via spontaneous encounters. The model reveals a transition from logistic to Gompertz-like diffusion curves dependent on communication density, linking microscopic interactions to macroscopic swarm behavior. How can these insights inform the design of robust and scalable algorithms for decentralized information dissemination in dynamic robotic environments?
The Elegance of Encounter: Modeling Realistic Swarm Communication
The efficacy of robot swarms hinges on their ability to share information rapidly and reliably, yet current modeling approaches frequently fall short by assuming idealized communication scenarios. Many simulations treat interactions as instantaneous and ubiquitous, neglecting the physical constraints inherent in real-world robotic systems – limited sensing ranges, communication bandwidth, and the need for direct proximity. This oversimplification can lead to inaccurate predictions of swarm behavior, particularly in complex or dynamic environments. Consequently, a more nuanced understanding of how robots actually exchange data – accounting for the time it takes to establish contact, the likelihood of successful transmission, and the impact of individual robot movement – is essential for developing truly robust and scalable swarm intelligence systems. Addressing these limitations necessitates models that prioritize realistic interaction dynamics, paving the way for more effective control strategies and improved swarm performance.
Encounter-Driven Information Diffusion (EDID) presents a novel paradigm for robot swarm communication, departing from models that assume constant or probabilistic broadcast ranges. This approach posits that information transfer happens exclusively during direct physical encounters between robots-a momentary ‘handshake’ where data is exchanged. Rather than relying on signal strength or pre-defined communication radii, EDID focuses on the mechanics of movement and proximity; a robot only shares information when it physically collides with-or comes into very close contact with-another. This localized exchange is computationally efficient and inherently robust to noise or interference, as communication is guaranteed only upon verified contact. The model’s strength lies in its biological plausibility, mirroring how information might spread through physical interactions in natural swarms, and offering a more realistic and scalable approach to multi-robot coordination.
The fidelity of simulating swarm communication via Encounter-Driven Information Diffusion (EDID) fundamentally relies on accurately characterizing individual robot movement. Understanding the ‘Mean Free Path’ – the average distance a robot travels between physical encounters with others – is paramount to achieving realistic simulation results. This metric isn’t simply a geometric average; it’s intricately linked to individual robot dynamics, including turning rates, speed variations, and obstacle avoidance behaviors. A precise calculation of the Mean Free Path allows researchers to define encounter probabilities and, consequently, the rate at which information propagates throughout the swarm. Discrepancies between simulated and actual robot movement, reflected in an inaccurate Mean Free Path, can lead to significant errors in predicting swarm-level communication effectiveness, highlighting the critical role of this parameter in validating simulation models and ultimately, designing robust swarm systems.
![The mean free path [latex] au[/latex] represents the average time an agent (red) spends between interactions with surrounding agents (blue).](https://arxiv.org/html/2602.21148v1/x1.png)
From Microscopic Interactions to Macroscopic Predictions
The Macroscopic Model represents a departure from agent-based simulations by directly predicting collective information diffusion within a swarm, rather than simulating individual interactions. This is achieved by aggregating microscopic interaction data into parameters that govern overall diffusion rates. Extensive simulations, utilizing varied swarm sizes and interaction ranges, have demonstrated a high degree of model fit – quantified by [latex]R^2[/latex] values consistently exceeding 0.95 – validating the model’s predictive capability regarding the speed and extent of information spread. This approach offers significant computational efficiency compared to tracking each individual agent, enabling analysis of large-scale swarm behavior.
The macroscopic model utilizes the Mean Free Path (MFP) – the average distance a particle travels between collisions – to quantify the probability of encounters between individuals within the swarm. A shorter MFP indicates a higher collision rate and, consequently, a faster diffusion rate of information, as individuals exchange data more frequently. Conversely, a longer MFP corresponds to lower encounter probabilities and slower diffusion. The MFP is not a fixed value; it is dynamically calculated based on swarm density and individual movement parameters, directly informing the model’s prediction of information spread. This approach allows for a precise representation of how physical proximity and movement influence the rate at which information propagates throughout the swarm, offering a more realistic simulation than models that assume uniform interaction probabilities.
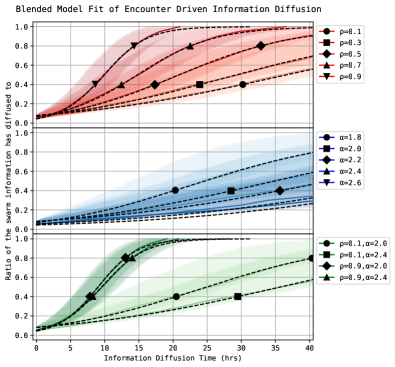
The macroscopic model accounts for varying swarm densities by integrating both the Logistic and Gompertz growth models. The Logistic model [latex] \frac{dP}{dt} = rP(1 – \frac{P}{K}) [/latex] is utilized to simulate information diffusion at lower swarm densities, where [latex] r [/latex] represents the growth rate and [latex] K [/latex] is the carrying capacity. Conversely, the Gompertz model [latex] \frac{dP}{dt} = rP \ln(\frac{K}{P}) [/latex] is employed at higher densities. A blending parameter, λ, governs the transition between these models, effectively weighting their contributions to the overall diffusion rate and allowing the model to accurately represent behavior across a range of density regimes. Values of λ closer to 0 emphasize the Logistic model, while values closer to 1 prioritize the Gompertz model.
Morphological Control: The Role of λ in Density Transitions
The blending parameter, λ, facilitates a continuous morphological transition between the Logistic and Gompertz functions, thereby expanding the model’s capacity to represent a broader spectrum of swarm density profiles. The Logistic function typically exhibits a symmetrical, sigmoid curve, while the Gompertz function is asymmetrical and skewed; λ controls the weighting between these two functions. A value of λ = 0 results in a pure Gompertz model, λ = 1 yields a Logistic model, and intermediate values produce hybrid curves that more accurately reflect observed density distributions in swarms exhibiting varying degrees of aggregation and dispersion. This continuous transition is crucial for modeling swarms where density characteristics fall outside the limitations of either the Logistic or Gompertz function alone.
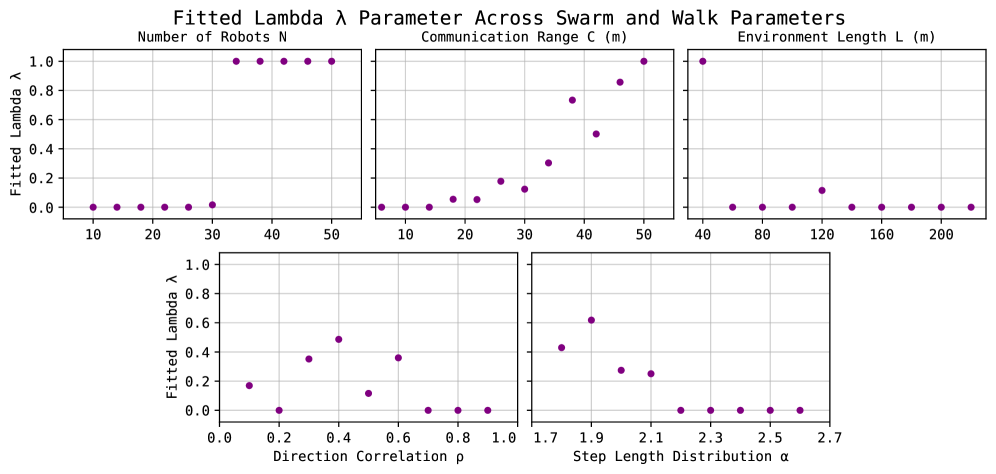
The blending parameter, λ, directly influences the model’s accuracy in representing information diffusion by responding to environmental factors. Specifically, an increase in communication range within the swarm correlates with a higher λ value, facilitating broader information spread. Conversely, λ decreases as environment size increases or when directed motion (ρ) is elevated. This inverse relationship with environment size reflects the increased difficulty of diffusion in larger spaces, while the decrease with higher ρ indicates that strong directional movement limits omnidirectional information propagation. These adjustments to λ ensure the model reflects the constraints imposed by both spatial characteristics and swarm behavior on the diffusion process.
Dynamic adjustment of the blending parameter λ enhances the model’s fidelity by enabling it to respond to changing swarm conditions. Specifically, alterations in λ account for variations in communication range, environment size, and the degree of directed motion (ρ) within the swarm. This adaptive approach moves beyond the limitations of fixed-parameter models, which struggle to accurately depict information spread across diverse swarm densities and behaviors. Consequently, the model’s robustness increases, yielding more reliable predictions of information diffusion patterns under a broader range of simulated conditions.
Motion as a Conduit: Impact of Locomotion on Information Flow
The manner in which robots navigate a shared space fundamentally alters how information disseminates throughout the collective. Studies reveal that simple movement patterns, such as a Correlated Random Walk (CRW) – where successive movements exhibit a degree of directional persistence – and a Levy Walk (LW) – characterized by long, infrequent excursions interspersed with short, frequent steps – generate markedly different encounter dynamics. A CRW tends to promote localized information spread, as robots repeatedly revisit nearby areas, fostering frequent interactions within a limited radius. Conversely, the long-range movements inherent in a Levy Walk enable information to propagate across greater distances, though potentially at a slower overall rate due to the intermittent nature of these extended steps. These varying encounter patterns demonstrate that motion is not merely a means of locomotion, but an integral component of the communication process within a robotic swarm.
The efficiency with which a robotic swarm disseminates information is fundamentally tied to the movement patterns of its individual members, and these patterns are deeply interwoven with the Exploration-Dissemination-Information Diffusion (EDID) framework. Both Correlated Random Walks (CRW) and Levy Walks (LW) – two distinct approaches to robot locomotion – directly influence how quickly and widely information propagates through the swarm. While CRW promotes more localized and rapid dissemination due to its tendency for clustered movement, Levy Walks, characterized by intermittent bursts of long-distance travel, demonstrably extend the time required for complete information coverage. This is because the longer propagation times inherent in LW strategies, though potentially reaching distant nodes, necessitate a greater overall duration for the swarm to achieve full awareness – a crucial consideration when optimizing collective behavior and ensuring robust communication in dynamic environments.
The efficacy of a robotic swarm hinges not only on individual capabilities but also on how readily information disseminates throughout the group. Research demonstrates a direct correlation between the movement strategies employed – such as correlated random walks or Levy walks – and the speed and range of this information spread. Optimizing these motion-diffusion relationships is therefore paramount; a swarm capable of rapidly and broadly sharing data can adapt more effectively to changing environments, coordinate complex tasks with greater precision, and ultimately achieve collective goals that would be impossible for isolated robots. This understanding allows for the design of swarms that prioritize communication efficiency, ensuring robust performance even in challenging or unpredictable conditions, and unlocking the full potential of collective intelligence.
Scaling and Sensitivity: Environmental Influence on Swarm Communication
Information spread within a swarm of robots is fundamentally shaped by the characteristics of its operating environment. The physical scale of the environment – its size – directly influences how quickly and effectively information propagates, as signals must traverse greater distances in larger spaces. This effect is interwoven with the communication range of each robot; a limited range necessitates more ‘hops’ for information to travel, potentially leading to bottlenecks or signal degradation. Crucially, the density of robots also plays a significant role; a higher density can facilitate rapid dissemination, but overcrowding can introduce interference and reduce effective communication. These three parameters – environment size, communication range, and robot density – aren’t isolated variables; their interplay dictates the overall dynamics of information diffusion, establishing the limits and possibilities of swarm intelligence in practical applications.
The effectiveness of swarm communication isn’t simply a matter of more robots talking; it’s a complex interplay between environmental factors and swarm characteristics. Researchers developed an Environment-Dependent Information Diffusion (EDID) model to systematically predict how parameters like environment size, communication range, and robot density collectively influence a swarm’s ability to share and utilize information. This framework doesn’t treat these elements in isolation; instead, it accounts for how a larger environment necessitates greater communication ranges, or how increased robot density can either accelerate or hinder information spread depending on the available bandwidth. By simulating these interactions, the EDID model offers a valuable tool for optimizing swarm designs and deployment strategies, ultimately enabling more robust and efficient collective behaviors in diverse and challenging scenarios.
The current research lays the groundwork for investigations into substantially larger robotic swarms operating within increasingly intricate environments. Scaling the EDID-based model presents significant computational challenges, requiring innovative algorithms and potentially distributed processing techniques to maintain real-time performance. Successfully addressing these hurdles promises to reveal emergent behaviors not observable in smaller systems, potentially leading to breakthroughs in collective problem-solving, adaptable search strategies, and robust task allocation. Further exploration aims to move beyond simplified simulations toward realistic scenarios, incorporating factors like uneven terrain, dynamic obstacles, and imperfect communication channels – ultimately realizing the full potential of swarm intelligence for applications ranging from environmental monitoring to disaster response and large-scale construction.
The presented work rigorously establishes a relationship between microscopic encounter dynamics and macroscopic information diffusion patterns within robot swarms. This echoes Blaise Pascal’s assertion: “All of humanity’s problems stem from man’s inability to sit quietly in a room alone.” While seemingly disparate, the principle applies; the swarm’s information transfer, much like a solitary mind, reaches a critical point where density-or lack thereof-dictates the nature of propagation. The transition observed between logistic and Gompertz curves isn’t merely a statistical anomaly but a consequence of this fundamental constraint, a limit imposed by the ‘encounter’ mechanism analogous to the limits of human attention. The model’s precision, therefore, isn’t simply about predicting diffusion rates but about uncovering the invariants governing collective behavior.
Beyond the Encounter
The presented model, while illuminating the shift between logistic and Gompertz diffusion regimes, ultimately underscores the persistent tension between descriptive accuracy and genuine understanding. The mean free path, serving as the fulcrum of this transition, merely quantifies how information spreads, not why such a mechanism prevails. Future work must address the fundamental limitations of encounter-driven communication; a system reliant on proximity inherently sacrifices robustness and scalability. The observed dynamics are, in essence, a consequence of communication constraints, not necessarily an emergent property of collective intelligence.
One anticipates that attempts to generalize these findings will quickly encounter the thorny issue of heterogeneous robot capabilities. The assumption of uniformity, a convenient simplification, obscures the reality of swarm composition. Introducing variance in sensing range, communication bandwidth, or even processing speed will undoubtedly disrupt the elegant transition predicted by the model. Such deviations will not simply refine the existing framework; they will demand a re-evaluation of the underlying assumptions.
Ultimately, the field must resist the allure of increasingly complex empirical observation. Heuristics, while expedient for engineering applications, offer little in the way of principled insight. True progress lies in developing mathematically rigorous frameworks capable of predicting swarm behavior a priori, rather than merely fitting curves to experimental data. The pursuit of elegance, though demanding, remains the only path to a truly predictive science of swarm intelligence.
Original article: https://arxiv.org/pdf/2602.21148.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- After THAT A Woman of Substance cliffhanger, here’s what will happen in a second season
- Limbus Company 2026 Roadmap Revealed
- Wuthering Waves Hiyuki Build Guide: Why should you pull, pre-farm, best build, and more
- XO, Kitty season 3 soundtrack: The songs you may recognise from the Netflix show
- Guild of Monster Girls redeem codes and how to use them (April 2026)
- Total Football free codes and how to redeem them (March 2026)
- The Division Resurgence Specializations Guide: Best Specialization for Beginners
- Gold Rate Forecast
- Genshin Impact Version 6.5 Leaks: List of Upcoming banners, Maps, Endgame updates and more
- Peaky Blinders: The Immortal Man brought back a ‘missing’ Shelby – and you didn’t notice
2026-02-25 21:58