Author: Denis Avetisyan
Researchers are leveraging principles from fluid dynamics to create more scalable and robust control systems for large robotic swarms.
A novel framework, FISC, enables decentralized swarm coordination through velocity-based control informed by fluid-like primitive variables.
Achieving scalable coordination in robotic swarms is often hampered by communication bottlenecks and vulnerabilities inherent in inter-agent messaging. To address this challenge, we present ‘FISC: A Fluid-Inspired Framework for Decentralized and Scalable Swarm Control’, a novel approach that leverages the principles of fluid dynamics to govern collective swarm behavior. By mapping robotic agent states to fluidic properties, we demonstrate that swarms can ‘flow’ through space based on velocity-fitting, achieving coherent motion without explicit communication. This work opens the possibility of controlling large multi-agent systems as continuum systems-but how can this framework be extended to more complex, dynamic environments and agent capabilities?
Centralized Control is a Fool’s Errand
Conventional methods for coordinating swarms of robots or autonomous agents frequently depend on a central processing unit to dictate movement and behavior. While effective in simple scenarios, this centralized architecture introduces critical vulnerabilities and limitations as the swarm grows in size or complexity. The single point of failure inherent in these systems dramatically reduces robustness; a failure in the central controller immediately compromises the entire swarm’s functionality. Furthermore, the computational burden on the central unit increases disproportionately with the number of agents, hindering scalability and the ability to respond effectively to dynamic changes in the environment. This reliance on centralized control ultimately restricts the deployment of swarms in large-scale, unpredictable real-world applications where adaptability and resilience are paramount.
Researchers are investigating a new control framework for multi-agent systems, drawing inspiration from the coordinated movements observed in natural swarms – from flocks of birds to schools of fish. This innovative approach moves beyond traditional, centralized algorithms by applying the principles of fluid dynamics to model agent interactions. Instead of dictating individual behaviors, the system treats the swarm as a continuous field, where agents respond to local densities and gradients, much like molecules in a fluid. This decentralized methodology promises increased scalability and robustness, as the system’s overall behavior emerges from the collective interactions rather than relying on a single point of control. By abstracting complex agent behavior into fluid-like dynamics, the framework aims to create more adaptable and resilient swarms capable of navigating dynamic environments and responding effectively to unforeseen circumstances.
The adoption of a fluid dynamics approach to swarm control promises systems exhibiting enhanced adaptability and resilience, crucial characteristics for operation in dynamic and unpredictable environments. By modeling agent interactions as continuous fields-akin to the flow of fluids-the system inherently distributes control, eliminating single points of failure and fostering robust performance even with individual agent malfunctions. This decentralized nature allows the swarm to gracefully handle unexpected obstacles or changes in the environment, reconfiguring its collective behavior without requiring explicit reprogramming or central coordination. Furthermore, the continuous representation enables smoother, more organic movements and facilitates emergent behaviors that would be difficult to achieve with traditional, discrete control algorithms, opening avenues for applications demanding highly flexible and responsive multi-agent systems.
Traditional methods of modeling swarm behavior often treat each agent as a discrete entity governed by specific, pre-programmed rules, creating computational bottlenecks as swarm size increases and hindering adaptability to changing environments. This research proposes a shift in perspective, conceptualizing swarm interactions not as individual agent actions, but as continuous fields analogous to fluid flow. By representing agent density and movement as fields, the system allows for emergent collective behaviors to arise from the interactions of these fields, rather than relying on explicit, rule-based commands for each agent. This continuous field approach offers a significant advantage in scalability, as the computational cost grows more gracefully with swarm size, and provides inherent robustness through the system’s ability to redistribute influence and adapt to local disturbances – mirroring the resilience observed in natural swarms like flocks of birds or schools of fish. The result is a framework where collective intelligence emerges from the continuous interplay of agents, circumventing the limitations of discrete control and unlocking the potential for highly adaptable and scalable multi-agent systems.

From Fluid Dynamics to Swarm Control: The FISC Framework
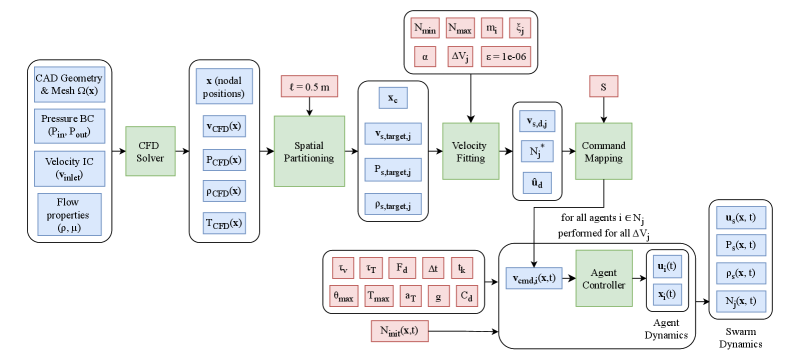
The Fluid-Inspired Swarm Control (FISC) framework represents swarm behavior by directly mapping concepts from fluid dynamics to individual agents. Specifically, each agent is assigned a velocity vector determining its movement, a density value reflecting local crowding, and is subject to forces derived from pressure gradients and a simulated ‘temperature’ representing kinetic energy. These parameters are not merely analogous; the framework utilizes mathematical relationships mirroring those governing fluid flow – such as equations of state and conservation laws – to define inter-agent interactions and collective behavior. This approach allows for the translation of well-established principles of fluid dynamics, like shockwave propagation and diffusion, into predictable and controllable swarm dynamics.
The Fluid-Inspired Swarm Control (FISC) framework employs the assumption of isentropic flow – a simplification of fluid dynamics where processes are assumed to be both adiabatic and reversible – to reduce computational complexity. This assumption allows for the elimination of terms related to viscosity and heat conduction from the governing equations, specifically the Navier-Stokes equations, resulting in a more tractable model. While this simplification introduces a degree of approximation, it maintains sufficient accuracy in scenarios where density gradients are relatively small and thermal effects are minimal. The resulting equations, based on [latex]\rho u \cdot \nabla \rho = 0[/latex], facilitate real-time control of swarm agents by significantly reducing the computational burden associated with simulating complex fluid dynamics.
Within the Fluid-Inspired Swarm Control (FISC) framework, agent dynamics are defined by directly mapping velocity, density, pressure, and temperature variables to individual agent behaviors. Specifically, velocity dictates movement, density influences inter-agent spacing and collision avoidance, pressure regulates repulsive forces to prevent clustering, and temperature introduces a degree of randomness or exploratory behavior. These variables are not merely descriptive; they function as control parameters within each agent’s decision-making process, allowing complex, coordinated swarm behaviors – such as flocking, foraging, or formation control – to emerge from purely local interactions without any centralized planning or global communication. The continuous and differentiable nature of these fluid-inspired variables facilitates the application of control theory techniques for precise swarm manipulation.
The Fluid-Inspired Swarm Control (FISC) framework operates on a fully decentralized principle, eliminating the need for a central controller or global information broadcast. Each agent within the swarm autonomously determines its actions based solely on perceptions of its immediate surroundings – specifically, the velocity, density, pressure, and temperature values obtained from neighboring agents. This localized decision-making process enables scalability and robustness, as the failure of any single agent does not compromise the overall swarm functionality. Communication is restricted to local interactions, minimizing bandwidth requirements and enhancing the system’s resilience to communication disruptions. Consequently, the emergent behavior of the swarm arises from the collective effect of these individual, localized responses, rather than being dictated by a centralized authority.

Validation: Mirroring Fluid Dynamics with CFD
Computational Fluid Dynamics (CFD) simulations were implemented to establish a high-fidelity baseline for performance evaluation of the Flocking with Intermittent Swarm Control (FISC) framework. These simulations model fluid dynamics with a level of detail exceeding that of the real-time FISC implementation, providing an accurate representation of ideal swarm behavior. By comparing FISC-generated control signals and resulting fields-specifically velocity, density, and pressure-to the CFD simulation outputs, a quantifiable assessment of the framework’s accuracy and effectiveness is achieved. The CFD results are not used within the FISC control loop, but serve solely as a ground truth for validation purposes, allowing for objective measurement of the FISC framework’s ability to replicate complex fluid-like dynamics.
Velocity Fitting is a necessary procedural step within the FISC framework that translates high-fidelity velocity fields obtained from Computational Fluid Dynamics (CFD) simulations into control signals executable by a swarm of agents. This process directly maps CFD-derived velocity values to the swarm’s velocity commands, enabling the emulation of fluid-like behaviors and movements. The resulting velocity commands are designed to be feasible for the swarm to physically execute, considering limitations in agent maneuverability and response times. By deriving these commands directly from the CFD solution, the framework ensures that the swarm’s collective motion closely approximates the fluid dynamics observed in the reference simulation.
Root Mean Squared Error (RMSE) was employed as the primary quantitative metric to assess the fidelity of velocity mapping between the FISC framework and high-fidelity Computational Fluid Dynamics (CFD) simulations. Evaluation of the mapped fields resulted in RMSE values ranging from 0.15 to 0.98 for velocity components, indicating a relatively small average error. Density and pressure fields demonstrated slightly higher errors, with RMSE values ranging from 0.61 to 0.98 and 0 to 0.937 respectively; however, these values still confirm a strong correlation between the FISC-derived data and the CFD reference solution.
Quantitative validation using Computational Fluid Dynamics (CFD) demonstrates a strong correlation between control signals generated by the FISC framework and the high-fidelity CFD solution. Specifically, Root Mean Squared Error (RMSE) values, used to quantify the accuracy of velocity mapping derived from the CFD data, range from 0.15 to 0.98 for velocity, 0.61 to 0.98 for density, and 0 to 0.937 for pressure. These RMSE results indicate a high degree of fidelity between the FISC-derived control outputs and the established CFD benchmark, thereby confirming the effectiveness of the FISC framework in generating fluid-like behavior and accurate control signals.
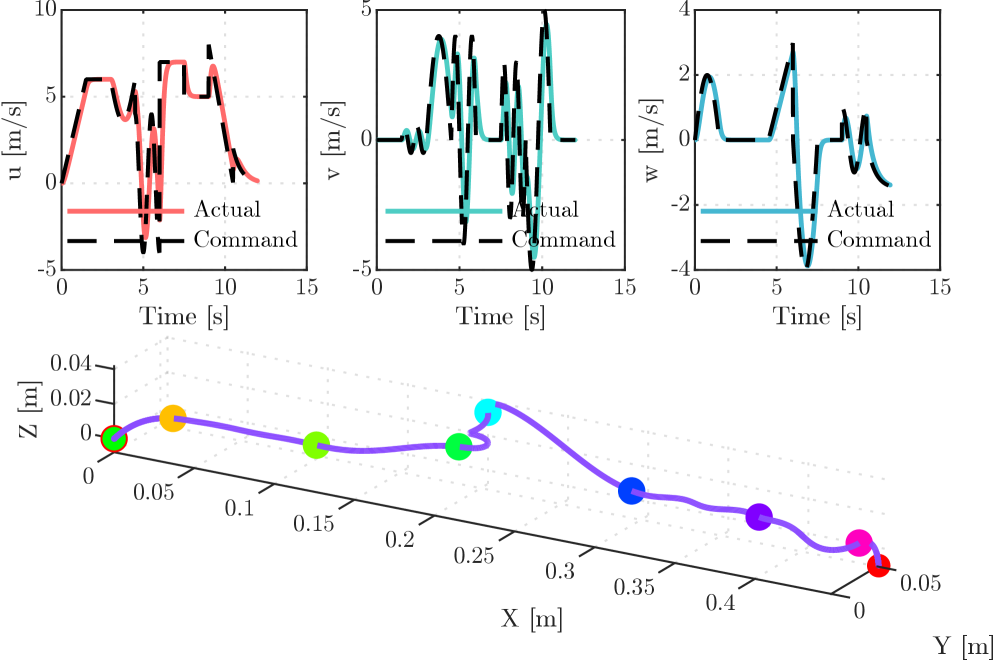
![Velocity contours in the XZ-plane for reservoir mode (Case 2) demonstrate that the post-velocity-fitting field [latex] extbf{v}_{s,d,j}[/latex] closely approximates the target velocity field [latex] extbf{v}_{s,target,j}[/latex] derived from computational fluid dynamics, and this approximation is reflected in the swarm simulation-derived velocity field [latex] extbf{u}_{s}( extbf{x},t)[/latex].](https://arxiv.org/html/2602.00480v1/x7.png)
Looking Ahead: Swarms for a Dynamic World
The Fluid Inspired Swarm Control (FISC) framework presents a significant advancement in decentralized swarm robotics by drawing parallels with the principles of fluid dynamics. Traditional swarm control methods often struggle with scalability and robustness, becoming computationally expensive and unreliable as the number of agents increases or the environment becomes complex. FISC, however, utilizes concepts like vorticity and streamlines to guide swarm behavior, allowing for efficient and coordinated movement without requiring centralized control or frequent inter-agent communication. This biomimetic approach not only reduces computational burden but also enhances the swarm’s ability to adapt to dynamic environments and navigate obstacles effectively, offering a more resilient and scalable solution for coordinating large numbers of robotic agents in diverse applications.
The decentralized control framework offers transformative potential across diverse fields. In environmental monitoring, swarms of robots could collaboratively map pollution sources or track wildlife migration patterns with greater efficiency than traditional methods. Search and rescue operations stand to benefit from the ability to rapidly deploy numerous agents to cover large areas and locate individuals in distress, even in hazardous conditions. Precision agriculture could see optimized resource allocation – water, fertilizer, pesticides – through targeted application guided by swarm-based sensing. Finally, infrastructure inspection, such as bridges and pipelines, could become safer and more cost-effective, with swarms autonomously assessing structural integrity and identifying potential issues before they escalate, representing a significant leap towards proactive maintenance and risk mitigation.
Ongoing development of the FISC framework prioritizes enhanced capabilities for navigating increasingly complex fluid environments. Researchers are actively integrating adaptive learning algorithms, enabling swarms to dynamically adjust their control strategies based on real-time feedback from the flow field. This includes incorporating reinforcement learning techniques to optimize individual agent behavior and collective swarm performance in turbulent or unpredictable conditions. By allowing the swarm to learn from experience, future iterations aim to move beyond pre-programmed responses and achieve robust, autonomous operation even when faced with unforeseen obstacles or changing environmental parameters. Such advancements will be crucial for deploying these swarms in real-world applications characterized by highly variable and dynamic flow conditions.
The convergence of fluid dynamics and swarm robotics promises a new era of autonomous systems capable of navigating and interacting with complex environments with remarkable proficiency. Current research suggests that by modeling collective swarm behavior as a fluid, researchers can leverage established principles of flow to optimize movement, coordination, and task allocation. This biomimicry not only enhances efficiency – minimizing energy expenditure and maximizing coverage area – but also introduces a level of robustness against disturbances and failures. Future swarms, informed by these advancements, are expected to exhibit emergent intelligence, adapting to unforeseen challenges and achieving goals through decentralized decision-making – ultimately leading to applications demanding both precision and resilience, from large-scale environmental monitoring to intricate infrastructure maintenance.
The pursuit of elegant control frameworks invariably collides with the messy reality of implementation. This work, drawing parallels between robotic swarms and fluid dynamics, feels particularly optimistic – a beautifully constructed theory attempting to tame inherent complexity. It posits velocity-based control informed by primitive variables, a neat conceptualization. However, one anticipates the inevitable edge cases, the emergent behaviors that defy prediction. As Ada Lovelace observed, “The Analytical Engine has no pretensions whatever to originate anything.” This framework, like any other, doesn’t create coordination; it merely formalizes a means to attempt it, hoping to nudge a chaotic system toward a desired state. The system will, predictably, find ways to break the model, and Monday deployments will undoubtedly prove the point.
Sooner or Later, It Will Break
This fluid-inspired approach to swarm control, while elegant in its derivation from computational fluid dynamics, merely shifts the problem, it does not solve it. The inherent messiness of real-world robotic swarms-sensor noise, actuator limitations, the occasional rogue unit deciding to pursue existential autonomy-will inevitably reveal the limitations of velocity-fitting and primitive variable abstractions. Production, as always, will be the ultimate, brutal QA.
The next iteration will likely involve attempts to bridge the gap between simulation and reality – more sophisticated modeling of uncertainty, perhaps, or adaptive control schemes that can tolerate-even exploit-the chaos. The pursuit of ‘scalability’ is a siren song; each doubling of swarm size will unearth a new class of emergent failures. Expect to see a lot of papers titled “Robust FISC for Noisy Environments” and “FISC with Limited Communication,” essentially admitting the initial premise wasn’t quite robust enough.
Ultimately, this work is a restatement of an old truth: everything new is old again, just renamed and still broken. The core challenge remains: coordinating a multitude of imperfect agents in a complex world. The framework presented offers a new set of tools for that task, but it’s a temporary reprieve, not a final solution.
Original article: https://arxiv.org/pdf/2602.00480.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- ‘Project Hail Mary’s Unexpected Post-Credits Scene Is Worth Sticking Around
- Total Football free codes and how to redeem them (March 2026)
- Limbus Company 2026 Roadmap Revealed
- The Division Resurgence Specializations Guide: Best Specialization for Beginners
- After THAT A Woman of Substance cliffhanger, here’s what will happen in a second season
- Brawl Stars Sands of Time Brawl Pass brings Sandstalker Lily and Sultan Cordelius sets, along with chromas and more
- Brawl Stars Brawl Cup Pro Pass arrives with the Dragon Crow skin and Chroma, unique cosmetics, and more rewards
- Clash of Clans April 2026 Gold Pass Season introduces a Archer Queen skin
- XO, Kitty season 3 soundtrack: The songs you may recognise from the Netflix show
- Wuthering Waves Hiyuki Build Guide: Why should you pull, pre-farm, best build, and more
2026-02-04 02:05