Author: Denis Avetisyan
Researchers are developing AI systems that don’t just analyze data, but actively perform experiments within simulated environments to accelerate scientific breakthroughs.
This paper introduces EmbodiedAct, a framework for grounding large language models in scientific discovery via embodied interaction with simulations, enabling runtime perception, constraint verification, and closed-loop self-correction.
While Large Language Models demonstrate promise in scientific discovery, a critical gap remains between theoretical reasoning and robust, verifiable physical simulation. This limitation motivates the research presented in ‘Grounding LLMs in Scientific Discovery via Embodied Actions’, which introduces EmbodiedAct, a framework that integrates LLMs with active, embodied agents within scientific software. By establishing a tight perception-execution loop, EmbodiedAct enables runtime anomaly detection and closed-loop self-correction, significantly improving the reliability and accuracy of long-horizon simulations. Could this approach unlock a new era of LLM-driven scientific modeling and automated design?
The Inevitable Limits of Static Models
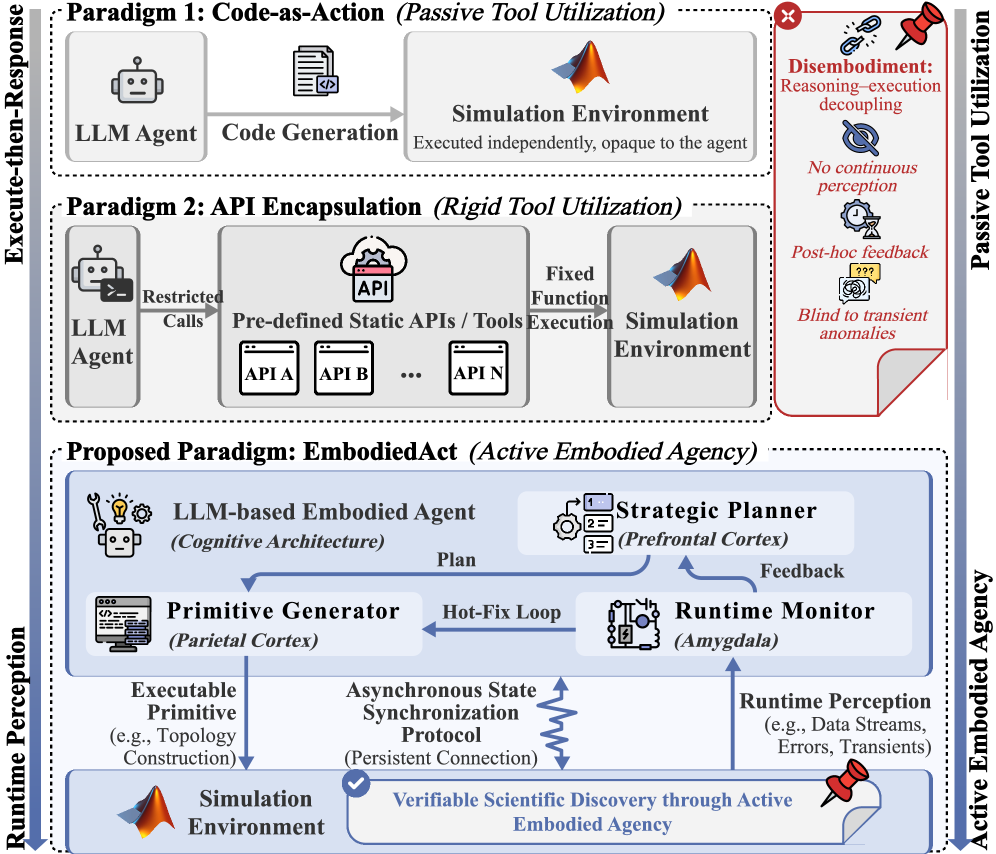
Conventional scientific simulations frequently depend on pre-defined, static codebases, which inherently restricts their ability to respond to unforeseen circumstances or thoroughly investigate multifaceted scenarios. This approach often necessitates researchers to anticipate every potential variable and program a specific response, proving inadequate when dealing with systems exhibiting emergent behavior or complex interactions. Consequently, these simulations can struggle to accurately model real-world phenomena where conditions are constantly evolving and unexpected events occur. The rigidity of static code limits the exploration of alternative pathways and hinders the discovery of novel insights, as the simulation’s trajectory is largely predetermined by the initial programming. This contrasts sharply with the dynamic and adaptive nature of the systems scientists aim to understand, creating a fundamental disconnect between model and reality.
Existing simulation techniques frequently encounter limitations when confronted with the unpredictable nature of complex systems, often resulting in runtime errors that halt progress and necessitate manual intervention. These methods typically operate on pre-defined parameters and lack the capacity for autonomous adaptation when faced with unforeseen circumstances or novel data streams. Consequently, researchers often find themselves locked in iterative cycles of code modification, re-execution, and error correction, a process that is both time-consuming and prone to overlooking subtle but critical interactions within the simulated environment. This reliance on post-hoc refinement hinders the ability to explore a wider range of possibilities and limits the potential for truly emergent behavior, as the simulation’s trajectory is continually constrained by the need to avoid immediate failure rather than proactively discovering new states.
The limitations of conventional simulations necessitate a shift towards systems that actively learn and adapt within dynamic environments. This emerging paradigm centers on integrating reasoning agents – artificial intelligences capable of planning, problem-solving, and inference – directly into simulation frameworks. Rather than passively executing pre-defined code, these agents can observe, interpret, and respond to evolving conditions, enabling continuous discovery and iterative refinement of models. This approach moves beyond simply predicting outcomes to actively exploring possibilities, allowing simulations to uncover novel behaviors and insights that would remain hidden within static, pre-programmed systems. The result is a more robust, flexible, and ultimately insightful method for tackling complex scientific challenges, mirroring the adaptive reasoning inherent in natural systems.
Embodied Reasoning: An Architecture for Verifiable Discovery
EmbodiedAct utilizes Large Language Models (LLMs) not as standalone problem solvers, but as integrated reasoning engines within a simulated environment. This architecture allows for dynamic problem solving by enabling the LLM to iteratively analyze simulation states, formulate hypotheses, and propose actions to be executed within the simulation. The LLM receives observational data from the simulation, processes this information to determine appropriate next steps, and then directs the simulation accordingly. This closed-loop interaction facilitates exploration of complex problem spaces and allows the system to adapt its approach based on the outcomes of previous actions, moving beyond pre-programmed responses to achieve goals through reasoning and experimentation within the simulated world.
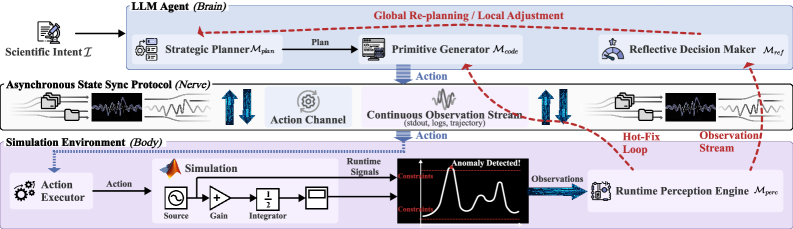
EmbodiedAct utilizes an Asynchronous State Synchronization Protocol to facilitate continuous interaction between the Large Language Model (LLM) and the executing scientific software. This protocol avoids blocking operations by allowing the LLM to submit state requests and receive updates without requiring immediate responses. The LLM can thus continue reasoning and planning while the simulation runs, and the scientific software can proceed with computations independently. State is exchanged via a defined interface, including simulation parameters, observed results, and diagnostic information, enabling the LLM to monitor progress, adapt strategies, and issue new commands without halting the simulation process. This asynchronicity is crucial for maintaining real-time responsiveness and enabling complex, iterative problem solving within the framework.
The Strategic Planner within EmbodiedAct functions as a hierarchical task decomposition module. It receives high-level scientific objectives and translates them into a sequence of executable steps, organized in a tree-like structure. This decomposition allows for complex investigations to be broken down into manageable sub-tasks, each representing a specific action within the simulation environment. The planner determines the order of execution and dependencies between these sub-tasks, ensuring that the simulation progresses logically towards the intended scientific outcome. This hierarchical approach facilitates both automated execution and human oversight, allowing researchers to intervene and modify the plan as needed during the simulation process.
The Primitive Generator component within EmbodiedAct functions as a critical interface between high-level strategic plans and the execution environment. It receives hierarchical executive steps from the Strategic Planner and converts them into specific, actionable commands – termed ‘primitives’ – understood by the underlying scientific software. These primitives represent fundamental operations within the simulation, such as setting parameter values, initiating data acquisition, or triggering specific algorithms. The generator employs a software-specific translation layer, adapting the generalized steps into the precise syntax and data formats required by each integrated application. This ensures seamless execution of the planned sequence and facilitates automated control of the simulation environment without requiring manual intervention or code modification within the scientific software itself.
The Dynamic Perception of a Changing State
EmbodiedAct’s Runtime Perception capability enables continuous monitoring of the simulation environment, allowing the system to infer its current state dynamically. This is achieved through the observation of simulation variables and the application of inference mechanisms to determine relevant environmental conditions. Real-time state inference allows EmbodiedAct to react to changes within the simulation without requiring pre-programmed responses to specific scenarios, enhancing its adaptability and robustness. The system does not rely solely on initial conditions or pre-defined plans but continuously updates its understanding of the environment throughout the simulation lifecycle.
The Runtime Monitor is a core component of the system responsible for continuous oversight of the simulation’s execution. It actively tracks key performance indicators and predefined safety boundaries throughout the simulation lifecycle. Detection of potential risks, such as constraint violations or unexpected state deviations, triggers immediate alerts. These alerts are then relayed to the Reflective Decision Maker, enabling proactive intervention and preventing catastrophic failures or suboptimal outcomes. This monitoring process operates in real-time, allowing for dynamic adjustments and ensuring the simulation remains within acceptable operational parameters.
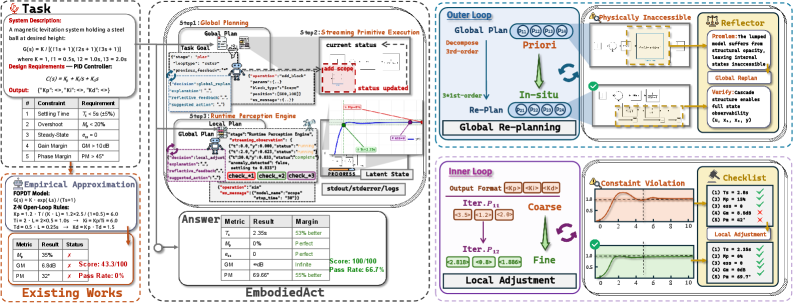
The Reflective Decision Maker within EmbodiedAct functions as a higher-level control system that analyzes the results of actions taken by the agent. It assesses performance against predefined constraints and objectives, identifying discrepancies between expected and actual outcomes. This evaluation triggers a replanning process, where the Decision Maker adjusts future actions to optimize performance and mitigate potential failures. By continuously monitoring results and adapting the execution strategy based on observed constraints, the system achieves adaptive behavior and improved robustness in dynamic environments. This process is distinct from simple error correction; it proactively refines the plan to enhance overall performance even in the absence of immediate errors.
The EmbodiedAct system incorporates a Hot-Fix Loop designed to address errors occurring during simulation runtime and recalibrate the environment accordingly. This loop actively monitors for and mitigates issues as they arise, contributing to increased system robustness and reliability. Quantitative analysis demonstrates a significant performance improvement; the implementation of the Hot-Fix Loop resulted in a 17.6% increase in average score when compared to the performance of the baseline CodeAct system, indicating its effectiveness in maintaining consistent and improved performance throughout the simulation lifecycle.
Beyond Automation: A Paradigm Shift in Scientific Exploration
EmbodiedAct represents a significant advancement over existing automated scientific exploration methods, such as CodeAct, by moving beyond static code execution to incorporate dynamic adaptation and learning directly within the simulated environment. This allows the framework to respond to changing conditions and refine its approach in real-time, resulting in demonstrably improved performance. Rigorous testing reveals a substantial 17.6% increase in average score and a remarkable 35.5% improvement in the pass rate for complex tasks, highlighting the benefits of this iterative, embodied approach to scientific discovery. The ability to learn and adjust within the simulation not only enhances accuracy but also contributes to a more robust and reliable exploration process, paving the way for automation in fields requiring complex problem-solving.
The framework distinguishes itself by seamlessly uniting computational reasoning and simulated action, allowing for a more nuanced exploration of complex scientific scenarios. Rather than simply executing a pre-defined plan, the system dynamically interprets its environment and adjusts its approach based on observed outcomes, fostering a cycle of hypothesis, action, and analysis. This integrated approach enables the discovery of novel insights that might be missed by traditional methods focused solely on calculation or execution. By actively intervening within the simulation and learning from the results, the framework doesn’t just solve problems; it investigates possibilities and reveals unexpected relationships, effectively automating a crucial aspect of the scientific method and accelerating the potential for breakthrough discoveries.
Simulations leveraging EmbodiedAct demonstrate markedly improved reliability and robustness through continuous observation and adaptive replanning. The framework doesn’t simply execute a pre-defined plan; it actively monitors the simulation’s state and adjusts its approach in real-time, mitigating the impact of unforeseen circumstances or initial inaccuracies. A key component of this adaptability is the Primitive Generator, which-while accounting for a substantial 58% of total token consumption-proves essential for consistently achieving higher accuracy and dependable results. This increased computational cost is demonstrably justified by the framework’s ability to navigate complex scenarios and consistently yield successful outcomes, offering a significant advantage over static, pre-planned simulations.
The framework presents a compelling trajectory towards automated scientific discovery, though not without computational cost. While requiring a 10.6x increase in token consumption compared to simpler methods, this overhead is posited as a justifiable investment in achieving genuinely exploratory simulations. The ability to dynamically adapt and replan within a modeled environment enables the system to navigate complex scenarios and, crucially, to identify novel solutions beyond pre-programmed parameters – a capability that fundamentally shifts the paradigm from execution to genuine discovery. This suggests a future where computational systems not only perform experiments, but actively formulate hypotheses and refine understanding, thereby accelerating the pace of innovation across diverse scientific disciplines.
The pursuit of scientific discovery, as detailed in this work regarding EmbodiedAct, mirrors the inevitable entropy of any complex system. This framework, integrating LLMs with runtime perception and simulation, attempts to mitigate decay by actively verifying constraints and enabling closed-loop self-correction. As Claude Shannon observed, “The most important thing is to get the message across.” EmbodiedAct, in essence, strives to ensure the ‘message’ – the scientific result – remains reliable despite the inherent ‘noise’ of complex systems and simulations. The continuous feedback loop acts as a form of graceful aging, preserving the integrity of the discovery process over time, rather than succumbing to inevitable inaccuracies.
The Horizon of Understanding
The integration of Large Language Models with active simulation, as demonstrated by EmbodiedAct, does not represent an arrival, but rather a carefully calibrated deceleration. The system’s capacity for runtime perception and closed-loop correction addresses a critical fragility inherent in purely symbolic reasoning – the disconnect from demonstrable consequence. However, the persistence of constraint verification as a necessary component reveals the enduring chasm between logical construction and physical reality; every delay is the price of understanding. The architecture is not about achieving perfect prediction, but graceful degradation-a means of acknowledging, and then navigating, inevitable failure.
Future iterations will undoubtedly focus on the fidelity of the embodied environment itself. Yet, the true challenge lies not in mirroring reality with increasing precision, but in identifying which aspects of it require mirroring. Simplification, not replication, will ultimately be the more potent strategy. A system that understands its own epistemic limits – the boundaries of its perceivable world – will prove more resilient than one striving for exhaustive representation.
Architecture without history is fragile and ephemeral. The current framework rightly emphasizes the iterative loop of action and observation. But true progress demands a memory – a capacity to retain, and learn from, the character of past failures. Only then can the system move beyond mere error correction, and begin to anticipate the subtle precursors of instability-a capacity akin to intuition, and perhaps, the first step toward genuine scientific insight.
Original article: https://arxiv.org/pdf/2602.20639.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- The Division Resurgence Best Weapon Guide: Tier List, Gear Breakdown, and Farming Guide
- Last Furry: Survival redeem codes and how to use them (April 2026)
- Gold Rate Forecast
- Limbus Company 2026 Roadmap Revealed
- After THAT A Woman of Substance cliffhanger, here’s what will happen in a second season
- GearPaw Defenders redeem codes and how to use them (April 2026)
- Genshin Impact Version 6.5 Leaks: List of Upcoming banners, Maps, Endgame updates and more
- Wuthering Waves Hiyuki Build Guide: Why should you pull, pre-farm, best build, and more
- XO, Kitty season 3 soundtrack: The songs you may recognise from the Netflix show
- Guild of Monster Girls redeem codes and how to use them (April 2026)
2026-02-25 15:17