Author: Denis Avetisyan
Researchers are leveraging neural networks to achieve precise, closed-loop control of soft robots, unlocking new possibilities for complex manipulation and locomotion.
![The research extends closed-loop inverse kinematics (CLIK) to infinite dimensions, enabling task-solving reasoning across the entirety of a soft robot’s shape, and overcomes the practical difficulty of obtaining analytical Jacobians for such models through the implementation of a neural network embedding learned from simulations [latex] \mathbb{J} [/latex].](https://arxiv.org/html/2602.18655v1/fig/abstract-no-background.png)
This work presents a novel approach to infinite-dimensional closed-loop inverse kinematics for soft robots using neural operators to learn actuation-to-shape mappings.
While kinematic control is well-established for rigid robots, its application to underactuated soft robots-possessing infinitely many degrees of freedom-remains a significant challenge. This work, ‘Infinite-Dimensional Closed-Loop Inverse Kinematics for Soft Robots via Neural Operators’, addresses this by extending closed-loop inverse kinematics (CLIK) to operate directly on the continuous shape of soft robots. We achieve this by learning the complex actuation-to-shape mapping with neural operators and deriving a Jacobian-based CLIK algorithm via an infinite-dimensional chain rule. By enabling differentiable control based on full-body shape information, does this approach unlock new avenues for robust and adaptable soft robot manipulation?
The Evolving Geometry of Control
Conventional robotics historically depends on kinematic models – mathematical representations of a robot’s structure and motion – to translate intended movements into precise actuator commands. However, these models are fundamentally limited when applied to soft robots. Unlike rigid-bodied robots with a finite number of degrees of freedom, soft robots exhibit infinite-dimensional deformation; any point on their body can move in countless directions. This continuous range of motion renders traditional kinematic approaches – built upon discrete joint angles and rigid body transformations – wholly inadequate. The very nature of soft robotics, with its reliance on flexible materials and continuous deformations, necessitates a paradigm shift away from precise geometric control and toward methods that can accommodate and predict the complex interplay between material properties, applied forces, and resulting shape changes.
The very characteristic that defines soft robotics – its remarkable flexibility – simultaneously presents a formidable control challenge. Unlike rigid robots governed by predictable kinematics, soft robots exhibit an infinite number of potential configurations, making precise prediction of shape and resulting task performance exceedingly difficult. This inherent compliance, while enabling adaptability and safe interaction with complex environments, introduces complexities in mapping actuator commands to desired outcomes. Minute variations in material properties, external disturbances, or even subtle changes in load can dramatically alter the robot’s deformation, leading to unpredictable behavior. Consequently, developing control strategies that account for this continuous, infinite-dimensional deformation is paramount to realizing the full potential of soft robotic systems and achieving reliable, repeatable performance in real-world applications.
Controlling soft robots presents a unique hurdle: translating actuator commands into predictable end-effector movements is far more complex than in traditional robotics. This difficulty stems from the intricate relationship between a soft robot’s material composition-its elasticity, for instance-and the resulting deformation when forces are applied. Unlike rigid robots where motion follows a defined kinematic chain, soft robots exhibit infinite degrees of freedom, meaning a single actuator input can produce a vast range of possible shapes. Consequently, even minor variations in material properties, or external loads, can significantly alter the robot’s configuration, making precise control a considerable challenge. Current control strategies often struggle to model these nonlinearities and hysteresis effects, hindering the ability to accurately map inputs to desired outcomes and necessitating the development of novel control algorithms specifically tailored for the complexities of soft materials and their deformations.
![Unlike traditional robotic tasks focused on precise end-effector positioning, this soft robot leverages its continuum structure to simply reach a target point with the closest location [latex]s_{\*}[/latex] on its backbone, dynamically adapting this point with each iteration.](https://arxiv.org/html/2602.18655v1/fig/tasks.png)
Mapping the Infinite: A Functional Representation
Accurate control of soft robots fundamentally depends on the ‘Actuation-to-Shape Mapping’, which defines the relationship between applied actuator inputs and the resulting deformation of the robot’s body. This mapping is not simply a set of discrete input-output pairs, but a functional relationship; for any given actuator input, the robot’s body adopts a specific shape represented as a continuous function. Precisely characterizing this function is crucial because soft robots exhibit an infinite number of degrees of freedom due to their continuous material properties, requiring a representation capable of handling this complexity to predict and control their behavior effectively. Without a robust model of this mapping, achieving precise and repeatable movements in soft robots becomes exceptionally challenging.
The representation of soft robot deformation as a mapping from actuator inputs to body shape is fundamentally infinite-dimensional due to the continuous nature of possible deformations. Unlike rigid bodies with finite degrees of freedom, soft robots can assume an infinite number of configurations. Therefore, describing these deformations requires a function space approach, specifically utilizing an L2 space – a complete metric space of square-integrable functions. Within this framework, robot shapes and their corresponding deformations are treated as elements, or functions, within the L2 space, allowing for the representation and analysis of continuous deformation fields. This contrasts with discrete representations common in traditional robotics and enables the modeling of complex, continuous deformations inherent to soft materials.
Neural Operator Networks provide a data-driven alternative to traditional physics-based modeling for the Actuation-to-Shape Mapping. Unlike finite element methods which require explicit formulation of material properties and boundary conditions, these networks learn the mapping directly from input-output data pairs of actuator commands and resulting robot configurations. This approach circumvents the computational expense and modeling challenges associated with discretizing and solving partial differential equations. By leveraging function space representations, Neural Operator Networks can approximate the infinite-dimensional relationship between actuation and shape with a manageable number of parameters, enabling efficient and accurate control of soft robots without relying on a pre-defined physical model.
The ‘Actuation-to-Shape Mapping’ is approximated using DeepONet, a neural operator architecture specifically designed for learning mappings between function spaces. Training utilized 1,000,000 samples to establish a robust relationship between actuator inputs and resulting robot configurations. To facilitate efficient computation and data handling, the continuous deformation space is discretized at 100 spatial points; DeepONet then learns to predict the deformation state at each of these points given an actuation input. This approach allows for rapid approximation of the mapping without the computational expense of traditional finite element methods or explicit function representation.
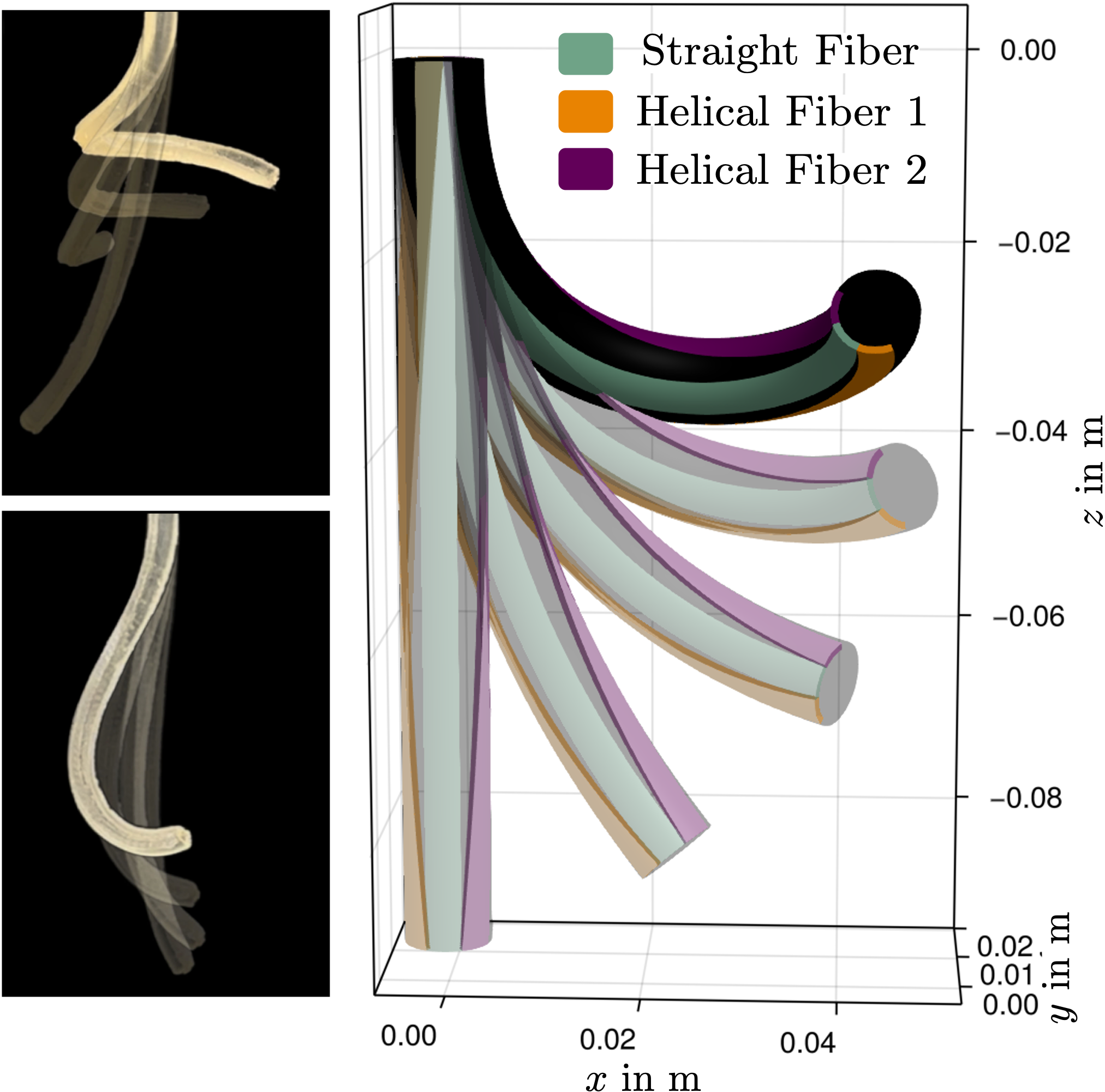
![Evolution of a three-fiber soft robotic arm demonstrates successful adaptation to both fixed-point and optimization-based reaching tasks, as evidenced by the time evolution of actuation variables [latex]\gamma_i[/latex] and task variables [latex]x[/latex].](https://arxiv.org/html/2602.18655v1/x11.png)
Extending Control to the Infinite: ID-CLIK
Infinite-Dimensional CLIK (ID-CLIK) extends the established Cyclical Coordination Descent (CLIK) algorithm to address the unique challenges presented by soft robot control. Traditional CLIK operates within finite-dimensional control spaces; however, soft robots, due to their continuous deformation, require optimization within infinite-dimensional spaces. ID-CLIK achieves this by leveraging a learned ‘Actuation-to-Shape Mapping’ to represent the robot’s kinematic response, effectively discretizing the infinite-dimensional problem into a computationally tractable form. This allows iterative refinement of actuator inputs to minimize error between the robot’s actual and desired configurations, enabling precise control of continuous soft robot morphology.
The Infinite-Dimensional CLIK algorithm operates through iterative refinement of the robot’s configuration, directly optimizing actuator inputs to minimize error between the current and desired task-space objectives. This optimization process leverages a pre-trained ‘Actuation-to-Shape Mapping’ which provides a predictive relationship between applied actuator forces and the resulting robot morphology. By utilizing this mapping, the algorithm efficiently searches the configuration space, enabling rapid convergence towards solutions that satisfy the defined task requirements without requiring computationally expensive forward kinematics calculations at each iteration. The algorithm’s efficacy is predicated on the accuracy of this learned mapping, which serves as a surrogate model for the robot’s complex physical behavior.
The Constant Curvature Segment model was employed as a computationally efficient platform for validating the Infinite-Dimensional CLIK algorithm and assessing its scalability. This simplified model, representing a series of connected circular arcs, allows for rapid prototyping and testing of control strategies without the complexities of full robot simulations. By utilizing this model, we were able to efficiently evaluate the algorithm’s performance across a range of configurations and demonstrate its ability to handle the high-dimensional control space inherent in soft robotics. The model’s relative simplicity facilitated the isolation and analysis of key algorithmic components, enabling a focused evaluation of the Infinite-Dimensional CLIK approach before implementation on more complex systems.
Evaluation of the learned Actuation-to-Shape Mapping on a held-out test set yielded a Mean Squared Error (MSE) of 1.38 x 10-10, indicating a high degree of conformity between predicted and actual robot configurations. Furthermore, the L2 Relative Error was measured at 6.08 x 10-4, quantifying the error magnitude relative to the scale of the desired shape. These metrics demonstrate the precision and accuracy of the learned mapping in predicting robot shape based on applied actuation, validating the efficacy of the Infinite-Dimensional CLIK algorithm.
![The inverse kinematics controller maps actuation commands [latex]q_a \in \mathbb{R}^m[/latex] to a task space with a square actuation-to-task mapping, as illustrated by the dimensionality changes represented in the diagram.](https://arxiv.org/html/2602.18655v1/fig/clik-scheme.png)
Towards Adaptive Intelligence: A Future Unfolding
Traditional robotics relies heavily on precise kinematic models – detailed mathematical descriptions of a robot’s structure and movement – to execute tasks. However, soft robots, with their inherent flexibility and infinite degrees of freedom, defy such straightforward modeling. This research addresses this fundamental challenge by offering a control framework that bypasses the need for these precise models altogether. Instead of dictating specific movements, the system learns a direct relationship between the robot’s shape and the resulting task performance within complex, real-world environments. This approach unlocks the potential for robust and adaptable soft robotic systems capable of operating reliably in unstructured settings where pre-programmed motions would fail, paving the way for applications in fields like search and rescue, minimally invasive surgery, and adaptable manufacturing.
A central achievement of this research lies in the robot’s ability to predict the consequences of its actions within uncertain environments, facilitated by a learned ‘Shape-to-Task Mapping’. This isn’t simply reactive control; the system effectively builds an internal model connecting the robot’s body configuration – its ‘shape’ – to the resulting environmental impact. Through extensive training, the robot develops an understanding of how specific deformations will manifest as forces or displacements in the surrounding world, allowing it to proactively adjust its movements. Consequently, the robot demonstrates increased robustness in the face of unpredictable disturbances and can adapt its strategies on the fly, enabling successful completion of tasks even when confronted with novel situations or imperfect initial conditions. This predictive capability represents a significant step towards truly intelligent and autonomous soft robotic systems.
The convergence of neural operators and infinite-dimensional control presents a significant advancement in the field of soft robotics, enabling the design of systems capable of intricate manipulation and locomotion. Traditional control methods struggle with the inherent complexities of soft robots – their infinite degrees of freedom and continuously changing shapes – but this approach bypasses the need for precise kinematic modeling. By leveraging the ability of neural operators to learn mappings between robot shape and resulting actions, and combining this with control strategies designed for infinite-dimensional systems, researchers are creating robots that can adapt to unpredictable environments and perform tasks requiring nuanced movements. This methodology allows for a more fluid and intuitive interaction with the world, paving the way for soft robots that can navigate challenging terrains, grasp delicate objects, and ultimately, perform complex tasks with a level of dexterity previously unattainable.
Investigations are now directed towards broadening the applicability of this control framework to encompass more intricate robotic designs, moving beyond simplified morphologies. A key element of this expansion involves merging the established control strategy with learning-based perception systems; this integration will enable robots to not only predict the consequences of their actions but also to interpret sensory data and dynamically adjust their behavior in response to unforeseen environmental changes. Such a fusion promises to unlock the potential for truly autonomous soft robots capable of navigating and manipulating complex, real-world scenarios, moving beyond pre-programmed routines to exhibit genuine adaptability and intelligence.
The pursuit of controlling soft robots, as detailed in this work, highlights a fundamental truth about complex systems: stability is often a temporary illusion. The researchers cleverly address the infinite-dimensional challenges of soft robot kinematics using neural operators to map actuation to shape. This approach isn’t about achieving perfect, static control, but about learning to navigate an inevitable drift. As Henri Poincaré observed, “It is through science that we arrive at truth, but it is through chaos that we arrive at creation.” The very act of learning this actuation-to-shape mapping acknowledges the inherent ‘chaos’ of a continuous shape space, accepting that the system will age and change, and focusing instead on gracefully managing that evolution.
What Lies Ahead?
The extension of closed-loop inverse kinematics to the infinite-dimensional spaces of soft robotics represents a localized slowing of the inevitable. Each successful mapping of actuation to shape is a temporary reprieve from the entropic drift toward disorder. This work, while elegant, underscores the fundamental challenge: control is not dominion, but a negotiation with inherent instability. The precision achieved is not a state of being, but a fleeting phase of temporal harmony.
Future investigations will undoubtedly confront the limits of learned mappings. The current paradigm, reliant on training data, implies a finite memory of possible configurations. Real-world soft robots, subject to unpredictable external forces and material fatigue, will inevitably encounter states outside this learned domain. Addressing this requires moving beyond static mappings toward systems capable of adaptive generalization – a kind of structural resilience against novelty.
Ultimately, the pursuit of increasingly complex control algorithms for soft robots is akin to building sandcastles against the tide. The technical debt incurred with each added layer of sophistication will require constant maintenance. The true measure of progress will not be the complexity of the control, but the system’s capacity to degrade gracefully, to yield to the forces of change without catastrophic failure.
Original article: https://arxiv.org/pdf/2602.18655.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- ‘Project Hail Mary’s Unexpected Post-Credits Scene Is Worth Sticking Around
- Total Football free codes and how to redeem them (March 2026)
- Limbus Company 2026 Roadmap Revealed
- The Division Resurgence Specializations Guide: Best Specialization for Beginners
- After THAT A Woman of Substance cliffhanger, here’s what will happen in a second season
- Brawl Stars Sands of Time Brawl Pass brings Sandstalker Lily and Sultan Cordelius sets, along with chromas and more
- Brawl Stars Brawl Cup Pro Pass arrives with the Dragon Crow skin and Chroma, unique cosmetics, and more rewards
- Clash of Clans April 2026 Gold Pass Season introduces a Archer Queen skin
- Wuthering Waves Hiyuki Build Guide: Why should you pull, pre-farm, best build, and more
- XO, Kitty season 3 soundtrack: The songs you may recognise from the Netflix show
2026-02-25 00:10