Author: Denis Avetisyan
A new approach to human-robot interaction prioritizes long-term relationships and adaptability over short-term tasks.
This review proposes modular co-design and the PAS framework (Personalization, Adaptability, Sustainability) to enable robots that evolve alongside humans throughout their lifespan.
While human-robot interaction increasingly focuses on long-term companionship, many designs remain constrained by fixed form and function. This paper, ‘Positioning Modular Co-Design in Future HRI Design Research’, explores modularity as a designerly medium for enacting and understanding evolving human-robot relationships through co-design. We articulate the PAS framework-Personalization, Adaptability, and Sustainability-to illuminate how participants configure modular robots to express needs, navigate transitions, and ensure long-term viability. Ultimately, how can designerly HRI prioritize expressive adequacy and responsible stewardship alongside traditional usability metrics to foster truly enduring connections?
The Inevitable Disconnect: Robots and the Fluidity of Human Life
Contemporary robot design frequently centers on pre-programmed, fixed functionalities, inadvertently creating a disconnect with the fluid and ever-changing requirements of human users. These machines are often conceived for specific tasks – assembly line work, basic navigation, or limited data collection – and struggle to adapt when presented with novel situations or shifting user needs. This rigidity stems from a historical emphasis on engineering precision over behavioral flexibility, resulting in robots that excel within narrow parameters but prove less useful as human lives introduce unforeseen complexities. Consequently, the potential for truly integrated and long-lasting human-robot relationships remains limited, as the machine’s capabilities fail to align with the dynamic nature of everyday life and the evolving roles individuals play throughout their lifetimes.
A key impediment to widespread robot acceptance lies in the limitations of current designs to foster sustained, meaningful connections with people. Robots frequently excel at performing specific, pre-programmed tasks, but struggle to adapt to the nuanced, ever-shifting demands of daily life and evolving user needs. This lack of adaptability diminishes long-term engagement; a robot perceived as inflexible or incapable of understanding contextual changes quickly becomes a novelty rather than a valuable companion or assistant. Consequently, the potential for truly collaborative and enriching human-robot interactions remains largely untapped, hindering the development of robots that seamlessly integrate into and genuinely enhance the human experience.
Conventional robot design often assumes a static relationship between the machine and its user, failing to account for the inevitable shifts in human needs and abilities over time. A robot initially assisting with childcare, for example, may become less useful as the child grows and requires different support, or as the parents’ own physical capabilities change. This inflexibility presents a significant challenge, as a truly integrated robotic companion should adapt to evolving user roles – transitioning from caregiver assistant to educational aid, then perhaps to a mobility support device in later life. The limitations of current models restrict their long-term viability, hindering the development of robots capable of fostering genuine, sustained relationships with humans across the lifespan, and ultimately limiting their potential to meaningfully enhance daily living.
Lifelong Companionship: Beyond Task Completion
Lifespan Human-Robot Interaction (HRI) represents a paradigm shift from task-specific robotic deployments to systems designed for sustained, multi-year engagement with individual users. This approach fundamentally prioritizes ongoing interaction and reciprocal change, moving beyond initial usability to encompass long-term relevance and user satisfaction. Unlike traditional HRI focused on discrete interactions, Lifespan HRI emphasizes continuous adaptation of the robotic system – encompassing software, hardware, and interaction strategies – in response to evolving user needs, preferences, and capabilities over extended periods. This necessitates proactive monitoring of user state, predictive modeling of future requirements, and the implementation of robust mechanisms for updating and maintaining the robot throughout its operational lifespan, ultimately fostering a durable and meaningful relationship between human and machine.
Adaptability, as a core tenet of Lifespan HRI, requires robotic systems to dynamically adjust their behavior, functionality, and even physical form over extended interaction periods. This necessitates mechanisms for continuous learning from user interactions, allowing robots to refine their models of user preferences, habits, and evolving needs. Adaptability extends beyond software updates; it includes modular hardware designs facilitating repair, component replacement, and functional upgrades. Furthermore, adaptable robots must possess the capacity to integrate new skills and functionalities, potentially through external APIs or user-defined extensions, ensuring continued relevance as user requirements change and new technologies emerge. This proactive evolution distinguishes adaptable robots from systems requiring complete replacement when faced with changing circumstances.
Sustainability in the context of Lifelong Human-Robot Interaction (HRI) requires a multi-faceted approach extending beyond operational lifespan. Robotic systems must be designed for relevance over years, necessitating modular architectures to facilitate upgrades and adaptation to evolving user needs and technological advancements. Repairability is crucial, demanding readily available replacement parts, accessible diagnostic tools, and designs that prioritize ease of disassembly and reassembly. Furthermore, ecological responsibility necessitates consideration of material sourcing, manufacturing processes, energy consumption during operation, and end-of-life recycling or responsible disposal protocols to minimize environmental impact. A truly sustainable robotic companion considers the entire lifecycle, from creation to decommissioning.
Modularity: The Foundation of Robot Evolution
Modular robot designs facilitate ongoing usability through simplified maintenance, modification, and component replacement. This approach to physical construction, utilizing standardized interfaces and interchangeable modules, enables users to repair damaged units without specialized expertise or complete system replacement. Furthermore, modularity supports incremental upgrades and customization, allowing functionality to be extended or adapted to changing needs without requiring a full system overhaul. This capability directly promotes material continuity – the sustained relevance and use of the robot’s constituent materials and core functionality over extended periods, minimizing waste and maximizing the robot’s lifecycle.
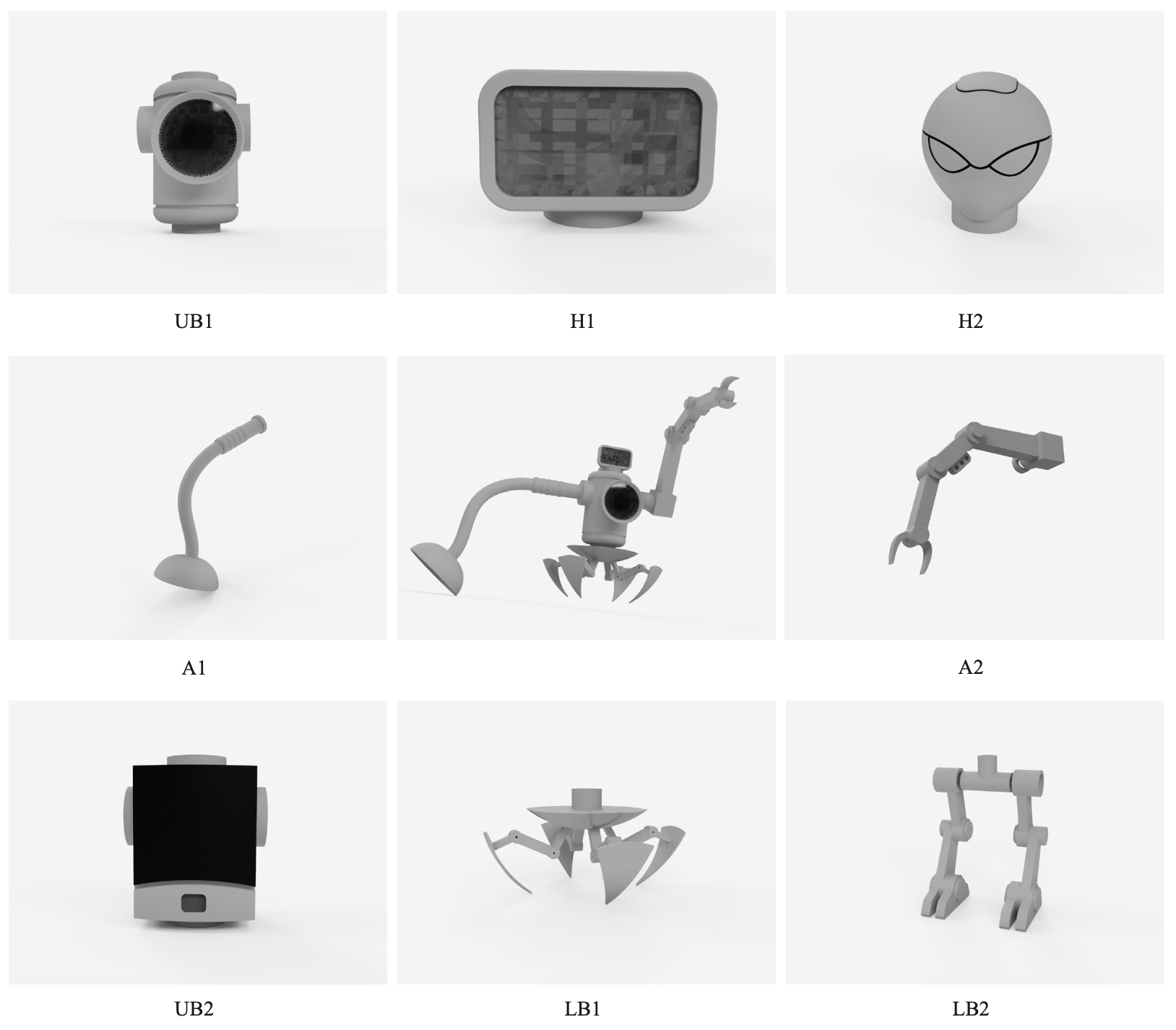
The Modular Co-Design methodology employs Temporal Probe techniques to investigate user projections regarding robotic evolution. These techniques involve structured interviews and design exercises where participants articulate anticipated future needs and how those needs might be met by a changing robot. Analysis of data collected from 23 workshop participants indicates users actively negotiate their relationship and identity with the robot as its modular form evolves, prioritizing features that maintain a sense of continuity and personal relevance despite physical alterations. This process reveals a proactive user engagement with robot design, shifting from passive acceptance to active co-creation of future functionality.
Relational Continuity, the maintenance of a meaningful human-robot connection despite physical alterations to the robot, was investigated through co-design workshops. Data collected from a total of 23 participants indicated that modular robot designs, allowing for user-directed component swapping and upgrades, contributed to the perception of the robot as a persistent entity. Participants expressed continued attachment and a sense of shared history even when the robot’s physical configuration changed, suggesting that the ability to retain core functional elements and personalize replacements supported the development of an ongoing relationship.
The PAS Framework: A Holistic Approach to Sustainable HRI
The evaluation of modular Human-Robot Interaction (HRI) benefits from a comprehensive metric, leading to the proposal of the PAS Framework – a holistic approach centered on Personalization, Adaptability, and Sustainability. This framework moves beyond simple functionality assessments, instead considering how well a robotic system can be tailored to individual user needs and preferences, its capacity to evolve with those needs over time, and its long-term ecological impact. By evaluating modular robots through these three interconnected lenses, researchers and designers can prioritize systems that not only perform tasks effectively, but also foster enduring user engagement and minimize environmental burdens – crucial factors for responsible innovation in the field of HRI.
The proposed framework extends the established Strengths, Adaptability, and Motivation (SAM) model to specifically address the challenges of designing Human-Robot Interaction (HRI) systems with longevity. By integrating principles of personalization and sustainability alongside adaptability, the framework offers a structured methodology for robot designers to proactively consider the evolving needs of users and the ecological impact of their creations. This approach moves beyond simply optimizing for immediate functionality, instead prioritizing designs that facilitate ongoing repair, component upgrades, and material reuse-ultimately fostering a more responsible and enduring relationship between humans and robotic technology. The result is a shift in perspective, viewing robots not as static entities but as dynamic platforms capable of continuous improvement and long-term ecological consideration.
The PAS Framework encourages a fundamental shift in how robotic systems are conceived – moving beyond the traditional model of fixed, finished products towards understanding them as continually evolving platforms. This perspective directly impacts user engagement, fostering longer-term relationships built on adaptation and growth. Crucially, the framework prioritizes ‘Repair’ not simply as a fix for malfunction, but as an inherent aspect of the robot’s lifecycle, promoting longevity and reducing electronic waste. This methodology was rigorously tested with a diverse group of 23 participants, encompassing both younger and older adults, demonstrating its applicability across demographic groups and validating the potential for sustained interaction and responsible robotic design.
The Illusion of Companionship: Identity and Relational Continuity
A robot’s capacity to maintain identity continuity – a consistent sense of self across interactions and over time – is proving to be a cornerstone of successful human-robot relationships. This isn’t simply about advanced programming; it’s about creating a machine that demonstrably remembers past interactions, learns from them, and integrates those experiences into its present behavior. Research indicates that humans instinctively project social cues onto entities exhibiting consistent personality traits, and this projection is crucial for establishing trust. Without a discernible and enduring identity, a robot risks being perceived as unpredictable or unreliable, hindering the development of genuine rapport. The ability to recognize and respond to individuals in a contextually appropriate and personally consistent manner allows for the creation of believable and engaging social interactions, ultimately fostering long-term bonds built on mutual understanding and dependability.
The development of enduring human-robot relationships hinges on a carefully considered design approach centered on modularity, personalization, and, crucially, Relational Continuity. Modularity allows for adaptable hardware and software, enabling robots to evolve alongside their human companions and accommodate changing needs. Personalization, achieved through learning and adaptation, fosters a sense of individual connection. However, it is Relational Continuity – the consistent maintenance of the robot’s ‘self’ across interactions and over time – that truly underpins trust. This means ensuring the robot remembers past experiences, recognizes familiar faces, and responds in a manner consistent with its established personality, creating a sense of predictable and reliable companionship. By prioritizing these elements, designers aim to move beyond transient interactions and cultivate bonds where the robot is perceived not as a disposable device, but as a persistent and valued member of the social landscape.
The trajectory of human-robot interaction suggests a shift beyond functional utility, envisioning a future populated by companions capable of fostering genuine, lasting bonds. This isn’t simply about creating more sophisticated tools, but designing robots that prioritize relational continuity – the ability to maintain a consistent, recognizable identity over time. Such a design philosophy moves beyond task completion to enable emotional resonance and trust, allowing robots to integrate into the fabric of daily life as enduring presences. By embracing modularity and personalization, alongside this emphasis on sustained identity, the potential arises for robots to become not just helpful assistants, but enriching companions that positively influence human well-being and offer a new dimension to the experience of connection.
The pursuit of adaptable robotic companions, as detailed in this exploration of modular co-design, feels…predictable. One anticipates the inevitable friction between theoretical elegance and the messy reality of sustained human interaction. It’s a cycle; frameworks designed for seamless evolution will, without fail, accrue technical debt. Andrey Kolmogorov observed, “The most important thing in science is not to be afraid of making mistakes.” This resonates deeply. The promise of personalization, adaptability, and sustainability – the PAS framework – is sound, but it’s the lived experience of long-term HRI that will truly test its mettle. One expects the robots won’t so much evolve with humans, as force a reluctant, iterative refinement of the system itself. It’s a comforting thought, really – proof of life in the machine.
What’s Next?
The pursuit of robots that evolve with humans, rather than simply for them, presents a familiar challenge. Each iteration of ‘lifespan HRI’ promises a paradigm shift, yet invariably delivers a more complex maintenance schedule. The PAS framework – Personalization, Adaptability, Sustainability – feels less like a fundamental breakthrough and more like an elegantly named list of things that inevitably break in production. Someone will inevitably attempt to quantify ‘emotional connection’ with a sensor suite, and the resulting data will be…optimistic.
The true test lies not in the initial demonstration of a modular, co-designed robot, but in its tenth-year service report. How easily can components be swapped, not just for functional repair, but to address obsolescence driven by changing user needs-or simply boredom? Will the co-design process genuinely yield robots that remain relevant, or just accrue a legacy of bespoke, unsupportable modifications?
One anticipates a surge in research focused on ‘trust calibration’-algorithms to convince users that a perpetually-under-construction robot is, in fact, working as intended. If code looks perfect, no one has deployed it yet. The longevity promised by modularity will be measured not in years, but in the cost of constant patching and the accumulated technical debt of good intentions.
Original article: https://arxiv.org/pdf/2602.19422.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- ‘Project Hail Mary’s Unexpected Post-Credits Scene Is Worth Sticking Around
- Total Football free codes and how to redeem them (March 2026)
- Limbus Company 2026 Roadmap Revealed
- The Division Resurgence Specializations Guide: Best Specialization for Beginners
- After THAT A Woman of Substance cliffhanger, here’s what will happen in a second season
- Brawl Stars Sands of Time Brawl Pass brings Sandstalker Lily and Sultan Cordelius sets, along with chromas and more
- Brawl Stars Brawl Cup Pro Pass arrives with the Dragon Crow skin and Chroma, unique cosmetics, and more rewards
- Clash of Clans April 2026 Gold Pass Season introduces a Archer Queen skin
- Wuthering Waves Hiyuki Build Guide: Why should you pull, pre-farm, best build, and more
- XO, Kitty season 3 soundtrack: The songs you may recognise from the Netflix show
2026-02-24 08:56