Author: Denis Avetisyan
Researchers have developed a new approach to enable robots to safely explore and learn in unpredictable environments, even when interacting with unfamiliar objects.

This work introduces S.S. Explorer, a novel reinforcement learning framework leveraging Gaussian Processes for safe goal-driven exploration in stochastic environments with both discrete and continuous state spaces.
Operating in real-world environments demands that robots balance exploration with safety, a challenge often overlooked in current control and reinforcement learning paradigms. This paper introduces ‘Safe Stochastic Explorer: Enabling Safe Goal Driven Exploration in Stochastic Environments and Safe Interaction with Unknown Objects’, a novel framework leveraging Gaussian Processes to enable safe, goal-driven exploration under stochastic dynamics and facilitate safe physical interaction with unknown objects. Our approach strategically balances information gathering with safety constraints, providing probabilistic bounds on potential violations in both discrete and continuous state spaces. Could this framework represent a crucial step towards deploying truly reliable and adaptable robots in complex, uncertain environments?
The Inevitable Uncertainty of Exploration
Robotic exploration of real-world spaces presents significant safety challenges stemming from the inherent unpredictability of physical systems and the probabilistic nature of interactions. Unlike simulations or controlled laboratory settings, environments are rarely static; unexpected disturbances, imprecise sensor readings, and the complex dynamics of both the robot and its surroundings introduce stochastic transitions – random shifts in state – that can quickly lead to unsafe situations. A seemingly minor perturbation, such as a slippery surface or an unforeseen obstacle, can cascade into a loss of control or a collision. Consequently, robots operating in these dynamic spaces must contend with incomplete information and the constant possibility of unexpected events, demanding robust control strategies capable of mitigating risk and ensuring safe operation despite these inherent uncertainties.
Conventional robotic safety protocols frequently depend on comprehensive models of a system’s dynamics and environment, yet acquiring such models proves exceptionally difficult in real-world applications. These models are often incomplete or contain inaccuracies due to the complexity of unpredictable environments and the stochastic nature of physical interactions. Consequently, safety assurances built upon these flawed foundations frequently fail when confronted with unforeseen circumstances, limiting the robot’s ability to perform reliably in dynamic settings. This reliance on perfect knowledge represents a significant obstacle to deploying robots in truly complex, unstructured environments where complete system modeling is impractical or impossible, necessitating the development of alternative safety strategies that accommodate uncertainty.
The successful integration of robots into real-world settings, from warehouses and hospitals to bustling city streets, fundamentally depends on guaranteeing their operational safety. Unlike controlled laboratory environments, complex and dynamic spaces present unforeseen obstacles and interactions, demanding that robots not only perform tasks efficiently but also avoid causing harm to themselves, people, or property. This requirement extends beyond initial deployment, encompassing the entire learning process; a robot must learn new skills without risking dangerous actions during experimentation. Consequently, research focuses on developing methods that allow robots to explore and adapt while adhering to safety constraints, ensuring reliable and predictable behavior even in the face of uncertainty. Achieving this balance between performance and safety is not merely a technical challenge, but a prerequisite for public trust and widespread robotic adoption.
S.S. Explorer: Navigating the Probabilistic Landscape
S.S. Explorer addresses the challenge of robotic exploration in previously unknown environments by providing a framework for goal-directed behavior constrained by probabilistic safety assurances. Unlike methods relying on complete environment knowledge, S.S. Explorer operates under uncertainty, formally bounding the probability of constraint violation during exploration. This is achieved through the formulation of safety-critical regions and the continuous monitoring of predicted states against these regions. The framework doesn’t simply avoid known hazards, but actively manages risk by quantifying the likelihood of entering unsafe states, even as the environment model is refined through interaction. This probabilistic approach enables continued exploration while maintaining a user-defined level of safety, expressed as an acceptable probability of failure.
S.S. Explorer is designed to function effectively in both discrete and continuous state spaces, a characteristic achieved through the framework’s adaptable algorithms and data structures. This capability allows deployment across a broad range of robotic systems and environments, from those with clearly defined, quantized states – such as grid-based navigation – to those characterized by continuous variables like joint angles or velocity. Accommodating both state types is crucial for practical application, as it avoids the need for restrictive environment modeling or discretization, and enables optimization of computational resources based on the specific requirements of the robotic task and available processing power.
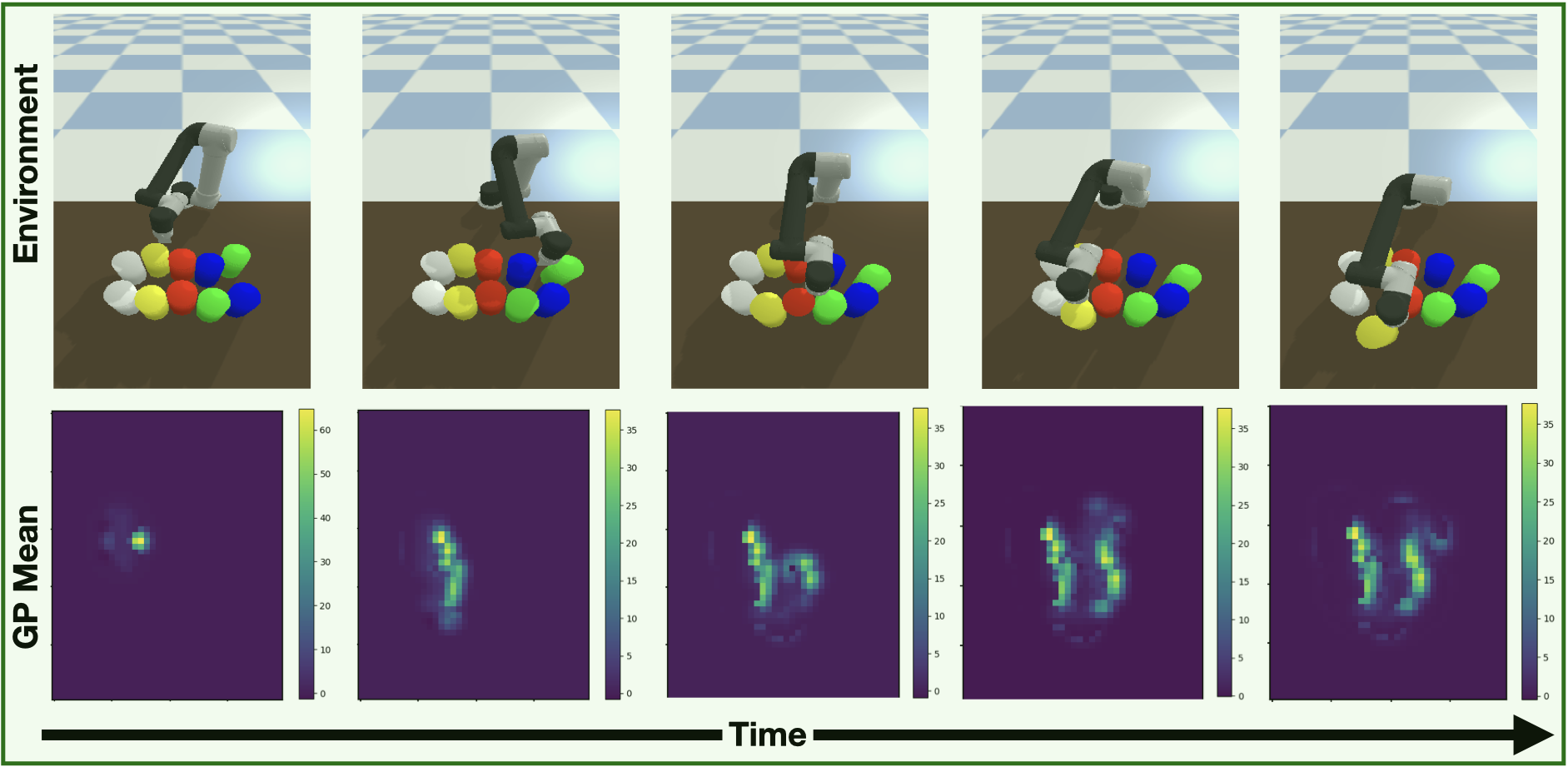
The S.S. Explorer framework utilizes Gaussian Processes (GPs) to model both safety functions and environment dynamics, enabling adaptive behavior in uncertain conditions. GPs provide a probabilistic representation of these functions, allowing the system to quantify uncertainty in its predictions. This is achieved by representing functions as samples from a Gaussian distribution, parameterized by a mean function and a kernel function that defines the similarity between data points. As the agent interacts with the environment and gathers new data, the GP is updated via Bayesian inference, refining the model and reducing prediction uncertainty. This adaptive modeling capability is critical for safe exploration, as it allows the system to learn and improve its understanding of the environment’s constraints and potential hazards over time, without requiring explicit pre-programming of all possible scenarios.
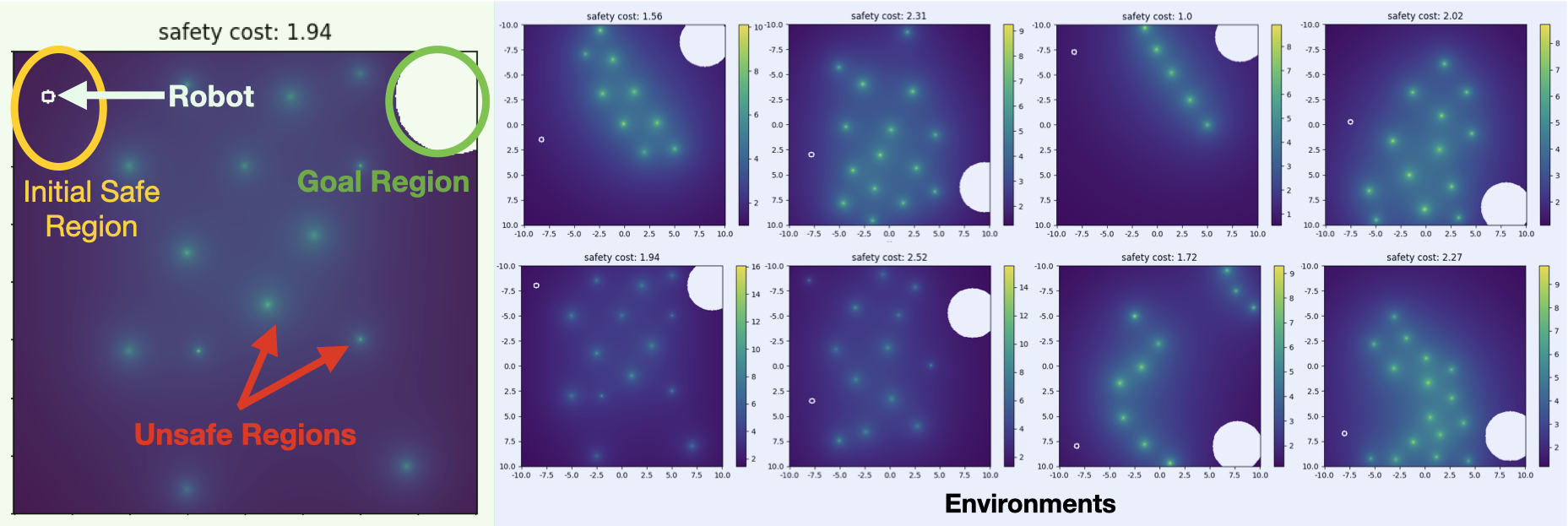
![Our algorithm successfully navigates the robot to its goal while respecting safety constraints by accounting for environmental stochasticity, unlike the baseline method which quickly violates the safety threshold of 4.4 in both discrete ([latex]4.05[/latex]) and continuous ([latex]6.94[/latex]) environments.](https://arxiv.org/html/2602.00868v1/images/result_trajectory_images/ground_continuous_ours.png)
Modeling Safety: The Language of Probabilities and Limits
Gaussian Processes (GPs) offer a data-driven approach to modeling safety constraints by representing functions as probability distributions over possible functions. This is achieved through defining a mean function and a kernel function that determine the smoothness and correlation of function values. Crucially, GPs do not require a predefined mathematical model of the system’s dynamics; instead, they learn the safety function directly from observed data. Given a set of input-output pairs representing safe and unsafe states, a GP infers the probability distribution over potential safety functions, allowing for prediction of safety at unseen states. The predictive distribution provides not only a point estimate but also a measure of uncertainty, which is vital for risk assessment and conservative control strategies. This capability is particularly useful in complex systems where deriving an explicit dynamic model is challenging or computationally expensive.
Incorporating Lipschitz continuity into the Gaussian Process (GP) kernel function enforces a limit on the steepness of predicted function values; specifically, it constrains the absolute value of the derivative of the predicted function to be less than a defined Lipschitz constant [latex] K [/latex]. This constraint is mathematically implemented by modifying the kernel to penalize large differences in predicted values for closely spaced inputs. The resulting GP model, therefore, provides not only a prediction of the function value but also an upper bound on the rate of change, which is vital for safety-critical applications. By bounding the function’s derivative, the model can guarantee that deviations from expected behavior will not exceed a predetermined threshold, enabling robust safety assurances during system operation and exploration.
S.S. Explorer leverages the combination of Gaussian Processes and Lipschitz continuity to enable robust risk management during exploratory phases of operation. The system utilizes the Gaussian Process to model potential safety deviations, providing a probabilistic prediction of system behavior without requiring a complete understanding of the underlying dynamics. The integration of Lipschitz continuity, enforced through the kernel function, constrains the rate of change predicted by the Gaussian Process, providing quantifiable bounds on potential safety violations. This allows S.S. Explorer to not only predict potential risks but also to actively mitigate them by adjusting exploration strategies based on the predicted bounds, even when facing significant uncertainty in the environment or system.
Validation: From Simulation to Real-World Performance
The effectiveness of S.S. Explorer in challenging scenarios is powerfully demonstrated through simulations utilizing advanced physics engines like PyBullet. These virtual environments allow for rigorous testing of the framework’s navigation and collision avoidance capabilities, exposing it to a wide range of complex obstacles and terrains. By simulating realistic physical interactions, researchers can quantify the system’s performance – assessing its ability to chart efficient paths, react to unexpected impediments, and maintain stability during movement. The use of such simulations not only accelerates development by providing a safe and repeatable testing ground, but also allows for detailed analysis of the underlying algorithms, ultimately enhancing the robot’s robustness and reliability before deployment in real-world settings.
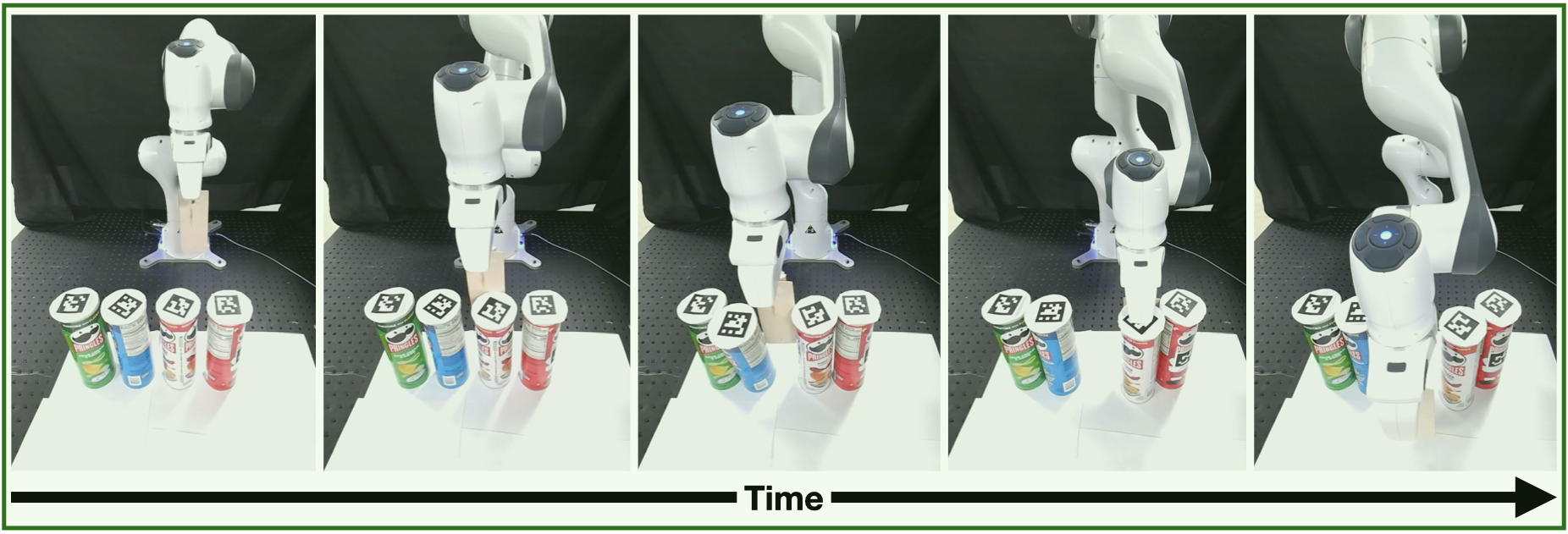
The framework achieves heightened safety in unpredictable scenarios through an object-centric approach to perception and planning. Rather than treating the environment as a continuous space, the system identifies and models individual objects, predicting their potential movement and interactions. This allows the robot to anticipate potential collisions and adjust its trajectory accordingly, even when encountering previously unseen objects or dynamic obstacles. By focusing on discrete entities, the system reduces computational complexity and improves the robustness of manipulation and exploration tasks, enabling reliable operation in cluttered and changing environments. This object-focused strategy moves beyond simply reacting to obstacles, and facilitates proactive, safe navigation and interaction.
Rigorous testing of the S.S. Explorer framework extended beyond simulated environments to include deployments on physical robotic platforms. These hardware experiments, conducted after extensive evaluation across 1111 diverse simulations, confirmed the framework’s ability to translate theoretical performance into practical success. Results demonstrated a marked improvement in task completion rates and, crucially, a significant reduction in safety violations when compared to existing methods. This validation underscores the potential of S.S. Explorer for real-world robotic applications, suggesting a pathway toward more robust and reliable autonomous systems capable of navigating and interacting with complex, unpredictable environments.
Toward Adaptive Systems: Embracing the Inevitable
S.S. Explorer establishes a robust architecture for robotic autonomy, enabling machines to navigate and interact with intricate, real-world environments without constant human oversight. The system doesn’t simply map an area; it actively learns the boundaries of safe operation, constructing an internal model that predicts potential hazards and adjusts behavior accordingly. This proactive safety mechanism, built upon principles of reinforcement learning and predictive modeling, allows the robot to venture into unknown territory with a minimized risk of collision or failure. By prioritizing safety as a core design principle, S.S. Explorer moves beyond basic navigation, fostering a level of resilience crucial for deployment in unpredictable settings, and ultimately paving the way for truly independent robotic systems capable of extended operation and complex task completion.
Researchers are poised to refine robotic exploration strategies through the integration of Bayesian Optimization, a powerful technique for efficiently finding the optimal solution within a complex search space. This approach allows robots to intelligently balance the trade-off between venturing into uncharted territory to gather information and consolidating gains in well-understood areas, ultimately maximizing the rate of discovery while simultaneously minimizing potential risks. By iteratively refining a probabilistic model of the environment, the robot can strategically select exploration paths that promise the greatest reward – be it mapping an area, locating a target, or achieving a specific objective – with each step informed by previous experiences and uncertainties. This adaptive methodology promises to not only accelerate exploration speed but also to enhance the robustness of robotic systems operating in unpredictable or hazardous conditions.
The developed framework promises substantial progress in diverse robotics applications demanding operation in unpredictable settings. Specifically, in search and rescue scenarios, the system’s ability to autonomously explore and adapt could locate victims more efficiently and safely than conventional methods. Environmental monitoring stands to benefit from the framework’s capacity to navigate complex terrains and collect data without constant human intervention, enabling comprehensive assessments of fragile ecosystems. Furthermore, the advancements facilitated by this work extend to autonomous navigation, offering the potential for more reliable and adaptable self-driving systems capable of handling unforeseen obstacles and dynamic environments, ultimately broadening the scope of robotic utility and impact across numerous fields.
The pursuit of safe exploration, as detailed in this framework, mirrors a system’s inevitable confrontation with entropy. Each interaction with an unknown environment, each stochastic dynamic encountered, represents a moment of truth in the timeline of the agent’s existence. As Paul Erdős observed, “A mathematician knows a lot of things, but not everything.” Similarly, this approach acknowledges the inherent uncertainty in unknown systems; it doesn’t aim for absolute knowledge, but for graceful degradation in the face of it. The S.S. Explorer, by prioritizing safety during exploration, functions as a mechanism to extend the lifespan of the system – to allow it to age gracefully amidst the inevitable accumulation of technical debt stemming from imperfect models of the world.
What Lies Ahead?
The presented framework, while a notable step, merely postpones the inevitable reckoning with true environmental unpredictability. Every commit is a record in the annals, and every version a chapter, yet the stochasticity inherent in real-world systems guarantees the eventual arrival of states unseen during training. The current emphasis on Gaussian Processes, while pragmatic, represents a localized solution-a smoothing of the wrinkles in time-rather than a fundamental conquest of the unknown. Future iterations must grapple with the limitations of any predictive model, acknowledging that perfect foresight is an asymptotic ideal, not a practical attainment.
A critical juncture lies in scaling these approaches beyond simulated environments. The transition introduces not merely computational burdens, but epistemological ones. Interaction with genuinely novel objects demands a shift from passive observation to active interrogation-a willingness to embrace controlled breaches of safety margins to refine internal models. Delaying fixes is a tax on ambition; the pursuit of absolute safety, paradoxically, hinders progress.
Ultimately, the field must confront the question of agency. Can a system truly “explore safely” if it lacks a nuanced understanding of consequence? Or is safety simply a function of constrained action, a temporary reprieve from the inherent chaos of existence? The answer, predictably, will not be found in algorithms, but in a deeper philosophical reckoning with the nature of intelligence and control.
Original article: https://arxiv.org/pdf/2602.00868.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Limbus Company 2026 Roadmap Revealed
- After THAT A Woman of Substance cliffhanger, here’s what will happen in a second season
- Total Football free codes and how to redeem them (March 2026)
- XO, Kitty season 3 soundtrack: The songs you may recognise from the Netflix show
- ‘Project Hail Mary’s Unexpected Post-Credits Scene Is Worth Sticking Around
- The Division Resurgence Specializations Guide: Best Specialization for Beginners
- Wuthering Waves Hiyuki Build Guide: Why should you pull, pre-farm, best build, and more
- Guild of Monster Girls redeem codes and how to use them (April 2026)
- Gold Rate Forecast
- ‘Project Hail Mary’s Soundtrack: Every Song & When It Plays
2026-02-03 23:02