Mapping Organic Crystal Landscapes with Generative AI
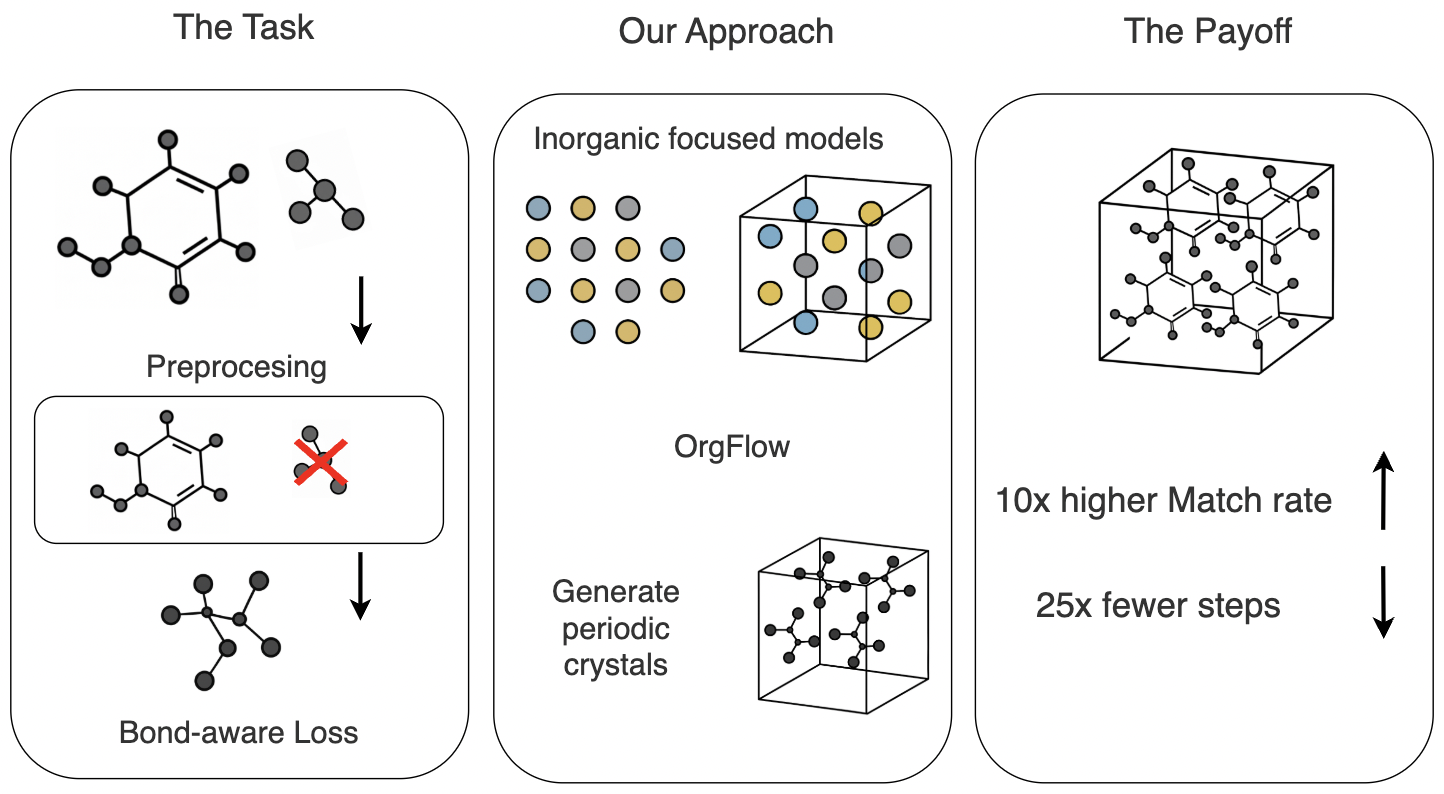
Researchers have developed a new AI framework that accurately predicts the arrangement of molecules in organic crystals, a critical step for designing advanced materials.
Researchers have developed a new AI framework that accurately predicts the arrangement of molecules in organic crystals, a critical step for designing advanced materials.
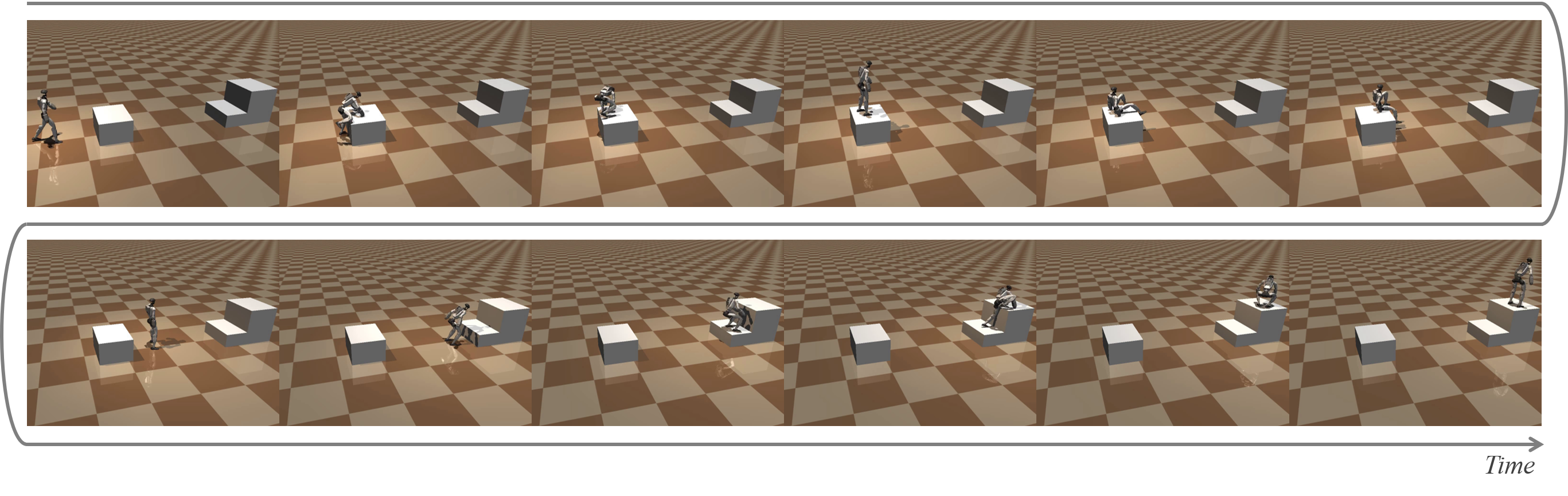
A new reinforcement learning framework enables humanoid robots to acquire versatile motor skills by combining reference guidance with goal-conditioned learning.
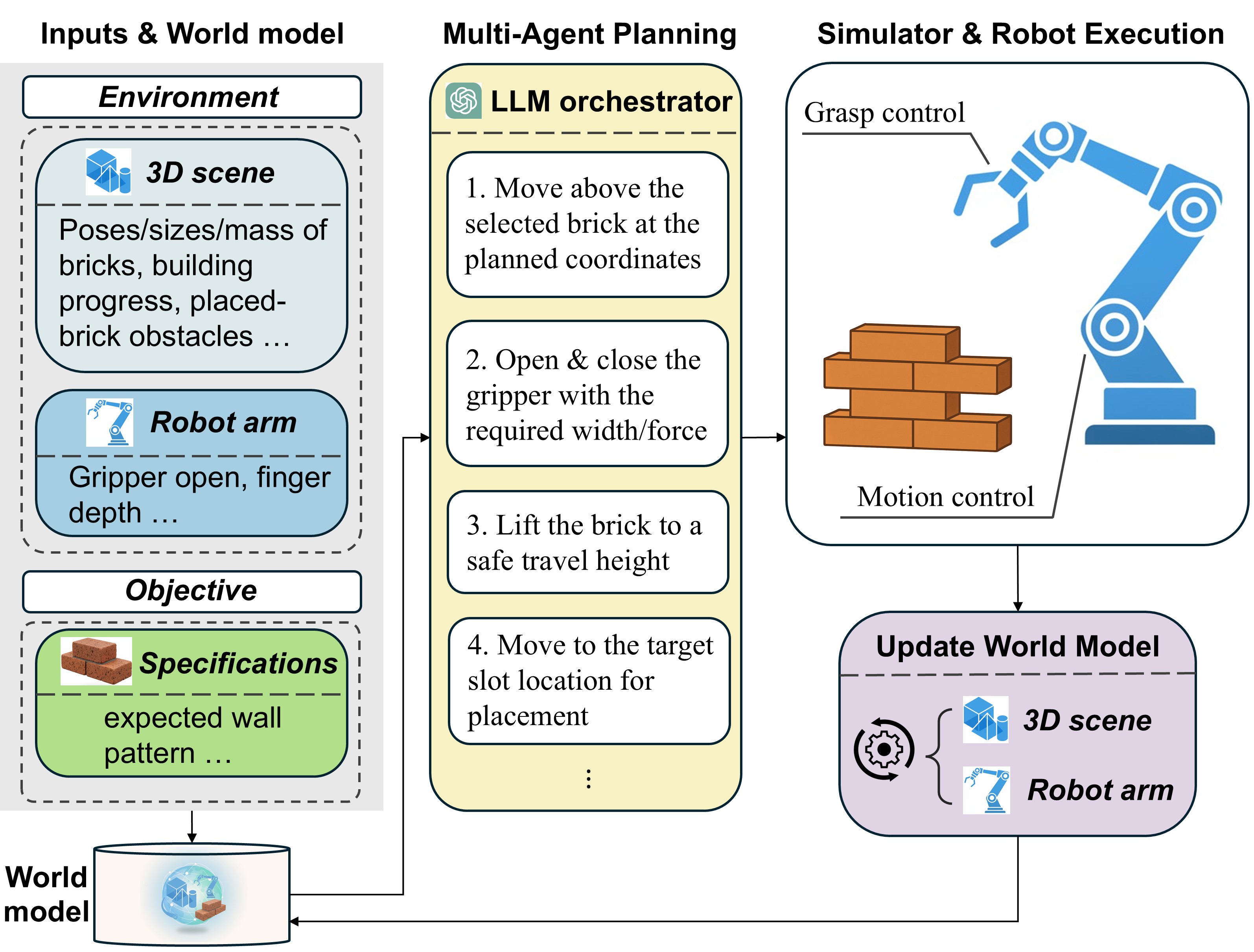
A new framework empowers robots to understand and perform complex physical tasks in three dimensions by leveraging the power of large language models and multi-agent reasoning.
![Halofirst anticipates task completion not through direct instruction, but by cultivating a self-attentive ecosystem of specialized experts - a multimodal understanding module, a visual generator, and an action predictor - working in concert to infer visual subgoals and execute actions conditioned on emergent, contextual reasoning [latex]EM-CoT[/latex] within a Mixture-of-Transformers architecture.](https://arxiv.org/html/2602.21157v1/x1.png)
Researchers have developed a unified model that allows robots to better understand complex instructions and perform intricate tasks by combining visual perception, language understanding, and action planning.
![The landscape of mutual cooperation shifts dramatically with even subtle variations in dyadic empathy, as simulations reveal that the fraction of collaboratively successful rounds-quantified as [latex] (C,C) [/latex]-is acutely sensitive to the empathy parameters [latex] \lambda_{i} [/latex] and [latex] \lambda_{j} [/latex] of interacting agents.](https://arxiv.org/html/2602.20936v1/images/Fig1_agent_empathy.png)
New research demonstrates how incorporating models of others’ preferences into planning algorithms can foster cooperation and unlock more nuanced interactions between artificial agents.
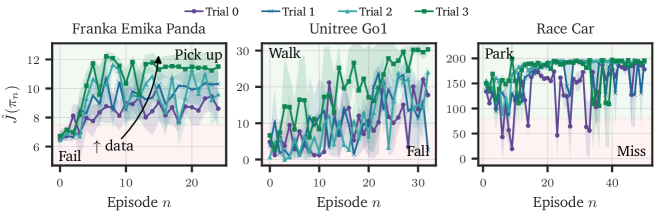
New research demonstrates that standard reinforcement learning techniques, when carefully tuned, can reliably transfer policies learned in simulation to physical robots for stable and efficient online learning.

A new systematic review explores the emerging concept of ‘agentic skills’ and how reusable procedural knowledge is key to unlocking the next generation of powerful and reliable AI agents.
![The study demonstrates that the interaction interval within a robotic swarm is governed by a relationship between the number of robots ([latex] NN [/latex]), communication range ([latex] CC [/latex]), and the dimensions of the operational environment ([latex] LL [/latex]), all considered in relation to the robots’ velocity ([latex] vv [/latex]), as evidenced by reported means and inter-quartile ranges.](https://arxiv.org/html/2602.21148v1/x4.png)
New research details how information propagates through robot swarms relying solely on direct, opportunistic communication between individuals.
![A hierarchical framework for analyzing parameter identifiability integrates eigenvalue decomposition and the Schur complement to categorize parameters across scales, revealing that predictive uncertainty stems from non-identifiable subspaces-specifically, contributions from zero-order non-identifiable parameters [latex]\boldsymbol{U\_{k-r\_{0}}^{\to p}\theta}[/latex] and first-order non-identifiable parameters [latex]\boldsymbol{U\_{k-r\_{0}-r\_{1}}^{\to p}\theta}[/latex]-and quantifying this uncertainty through a metric [latex]\mathcal{K}\_{i}[/latex] that defines practical identifiability.](https://arxiv.org/html/2602.20495v1/x1.png)
A new computational framework reveals how accurately we can estimate parameters in complex biological models, paving the way for more reliable data-driven discoveries.
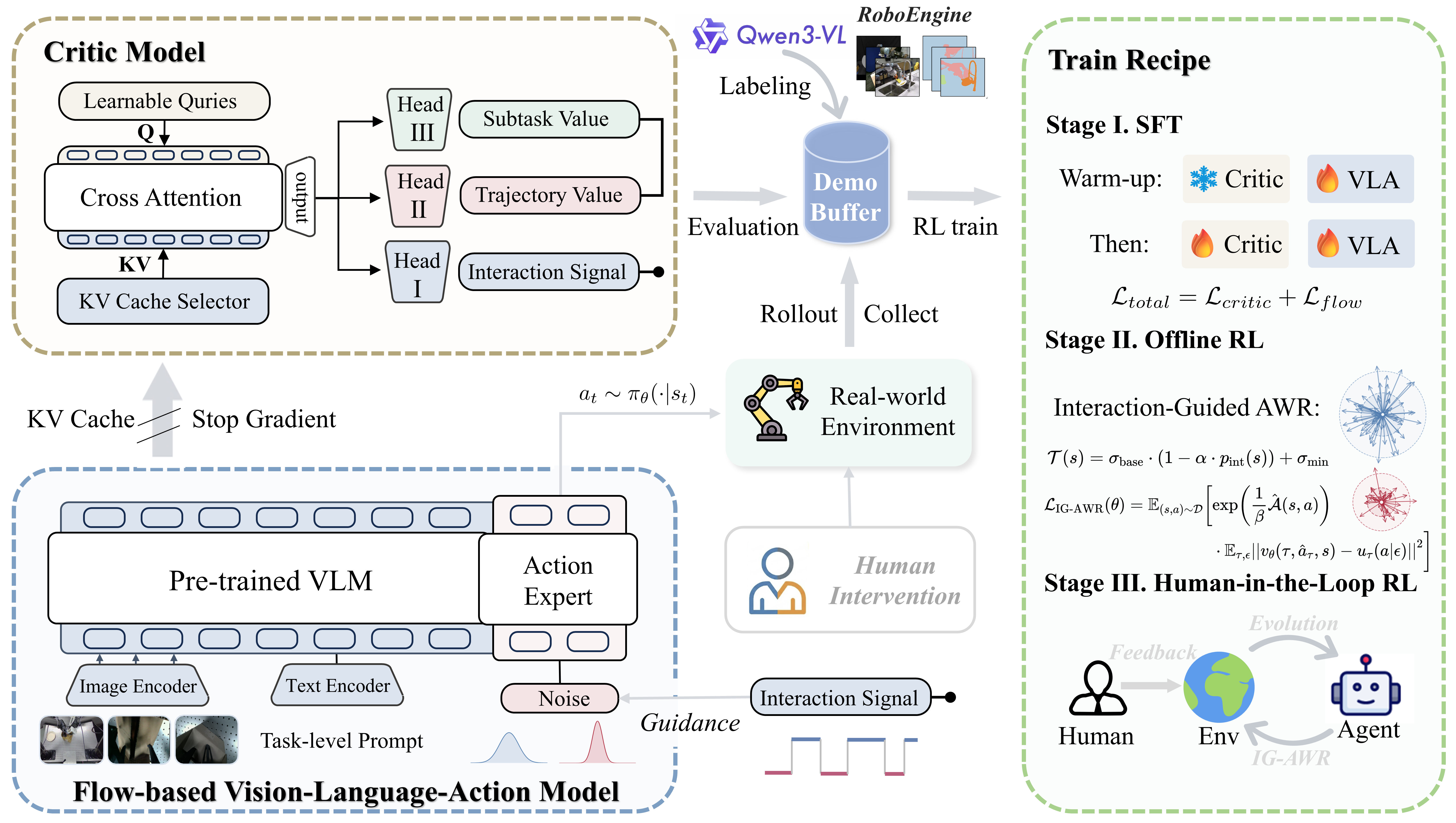
A new reinforcement learning framework guides vision-language models to master complex, long-duration manipulation tasks through interactive feedback.