From Concept to Conclusion: Automating the Scientific Story

A new framework streamlines research by converting initial ideas into complete scientific narratives, accelerating discovery and knowledge synthesis.
A new framework streamlines research by converting initial ideas into complete scientific narratives, accelerating discovery and knowledge synthesis.
New research demonstrates that humans readily cooperate with AI teammates when they behave in line with social expectations, suggesting established norms effortlessly transfer to mixed human-AI groups.
A new visual analytics system empowers researchers to explore vast quantities of medical literature and uncover hidden connections.

Researchers have developed a novel system that enables robots to perceive contact and track movement by ‘listening’ to vibrations, offering a surprisingly effective and affordable alternative to traditional tactile sensors.
A new wave of research is merging the principles of neuroscience with artificial intelligence to unlock more efficient and adaptable intelligent systems.
Researchers have developed a new framework that automatically generates custom soft robotic grippers optimized for grasping complex objects, moving beyond the limitations of pre-defined grasp types.
New research reveals that physician trust in AI-assisted diagnosis hinges on more than just getting the right answer.
New research reveals software engineers prioritize practical functionality over emotional intelligence when working with AI collaborators.
![Unlike human conversational partners who rapidly establish shared reference through lexical entrainment, this artificial intelligence pairing consistently fails to form efficient conceptual pacts, as evidenced by the verbose and repetitive descriptions-such as detailing the “[latex]picnic\,basket[/latex]” with identical exhaustiveness across multiple rounds-despite consistently identifying the correct target object, with one instance exhibiting a seemingly unrelated description yet still achieving correct selection.](https://arxiv.org/html/2601.19792v1/tables-figures/AI-AI_example.png)
New research reveals that large language models fundamentally differ from humans in their ability to establish common ground during conversations.
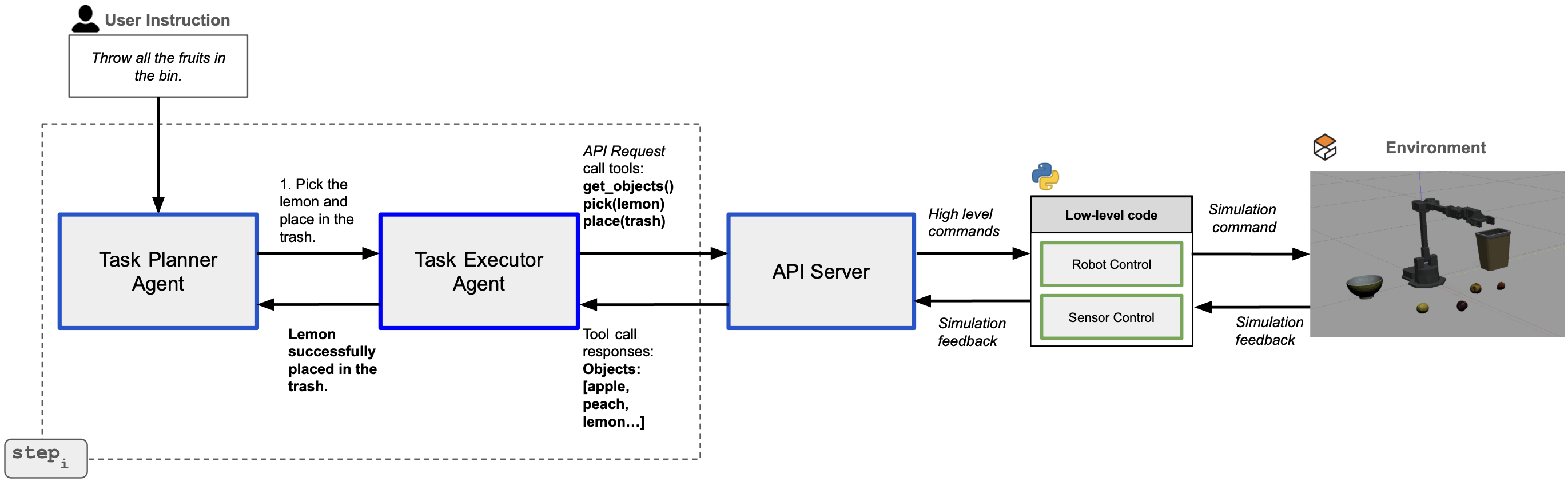
Researchers have developed a new framework that empowers robots to perform complex manipulation tasks using large language models as the core of their decision-making process.