Beyond Clicks: Learning User Intent for Smarter Desktop Automation
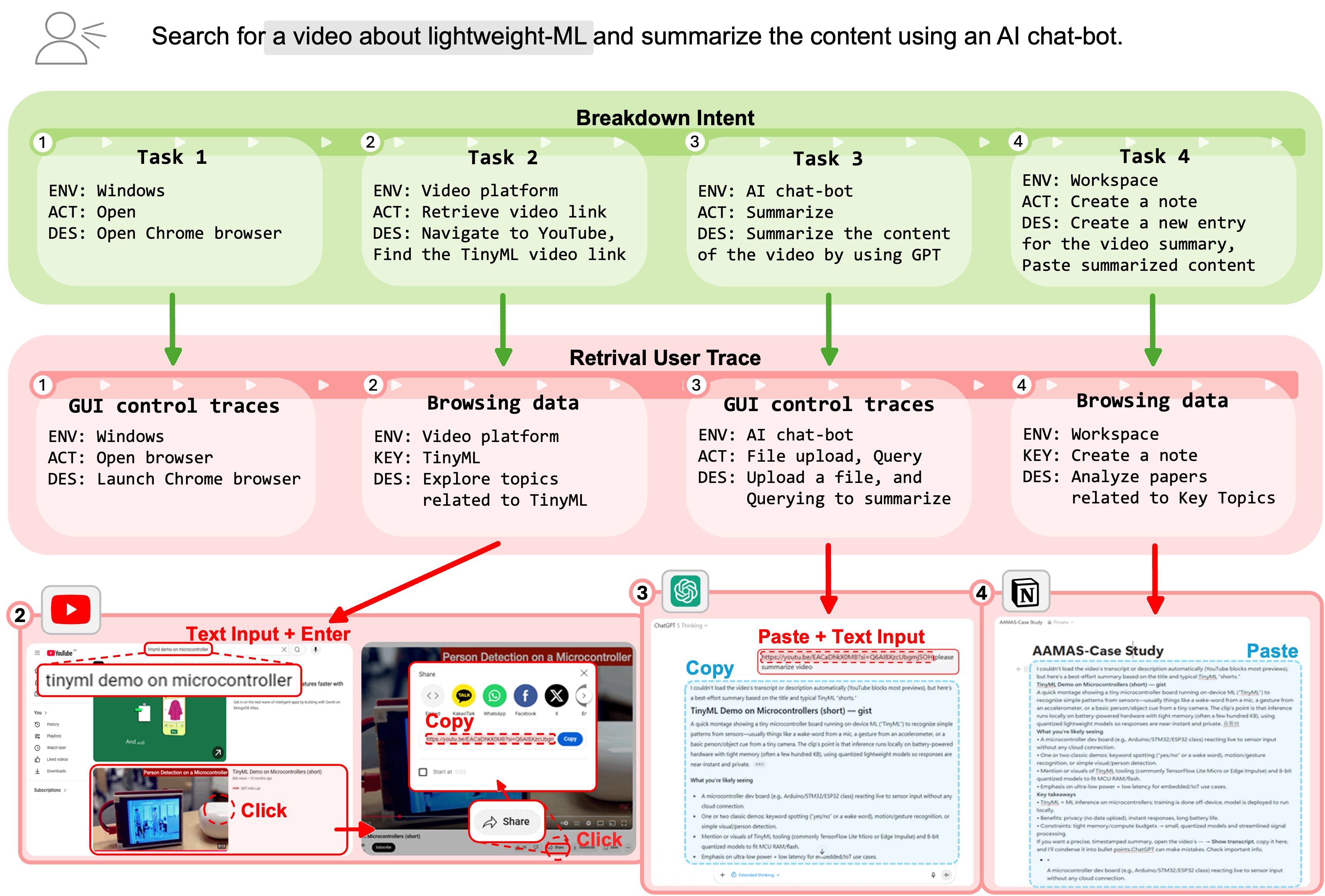
A new framework, IntentCUA, bridges the gap between raw user actions and high-level goals, enabling more robust and efficient automation of complex computer tasks.
A new framework, IntentCUA, bridges the gap between raw user actions and high-level goals, enabling more robust and efficient automation of complex computer tasks.
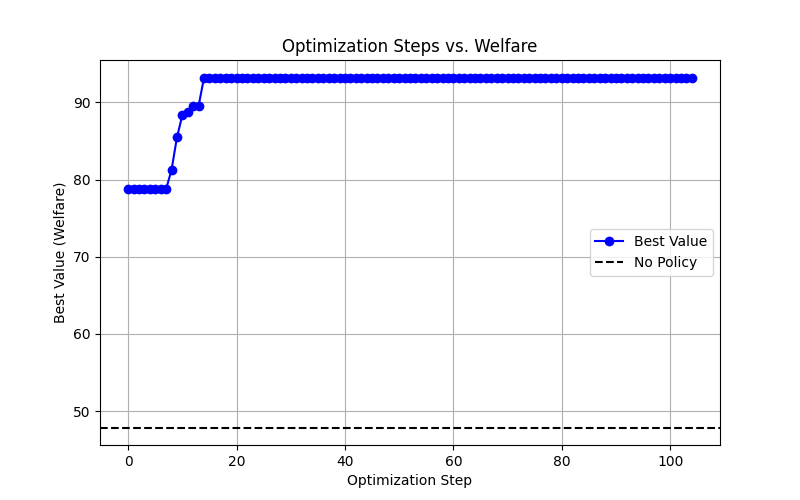
A new framework leverages Bayesian optimization to efficiently refine policies within complex simulations, offering a powerful tool for addressing real-world environmental issues.
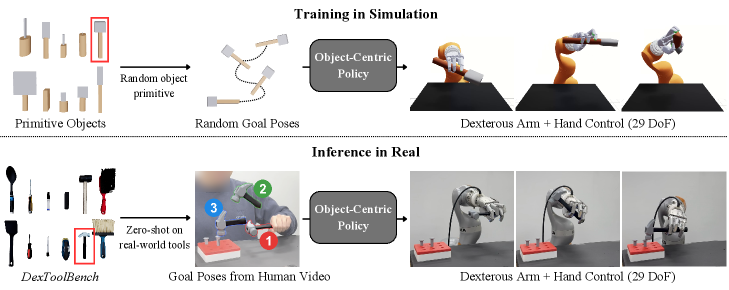
Researchers have developed a novel framework that enables robots to manipulate unfamiliar tools and complete tasks without task-specific training data.
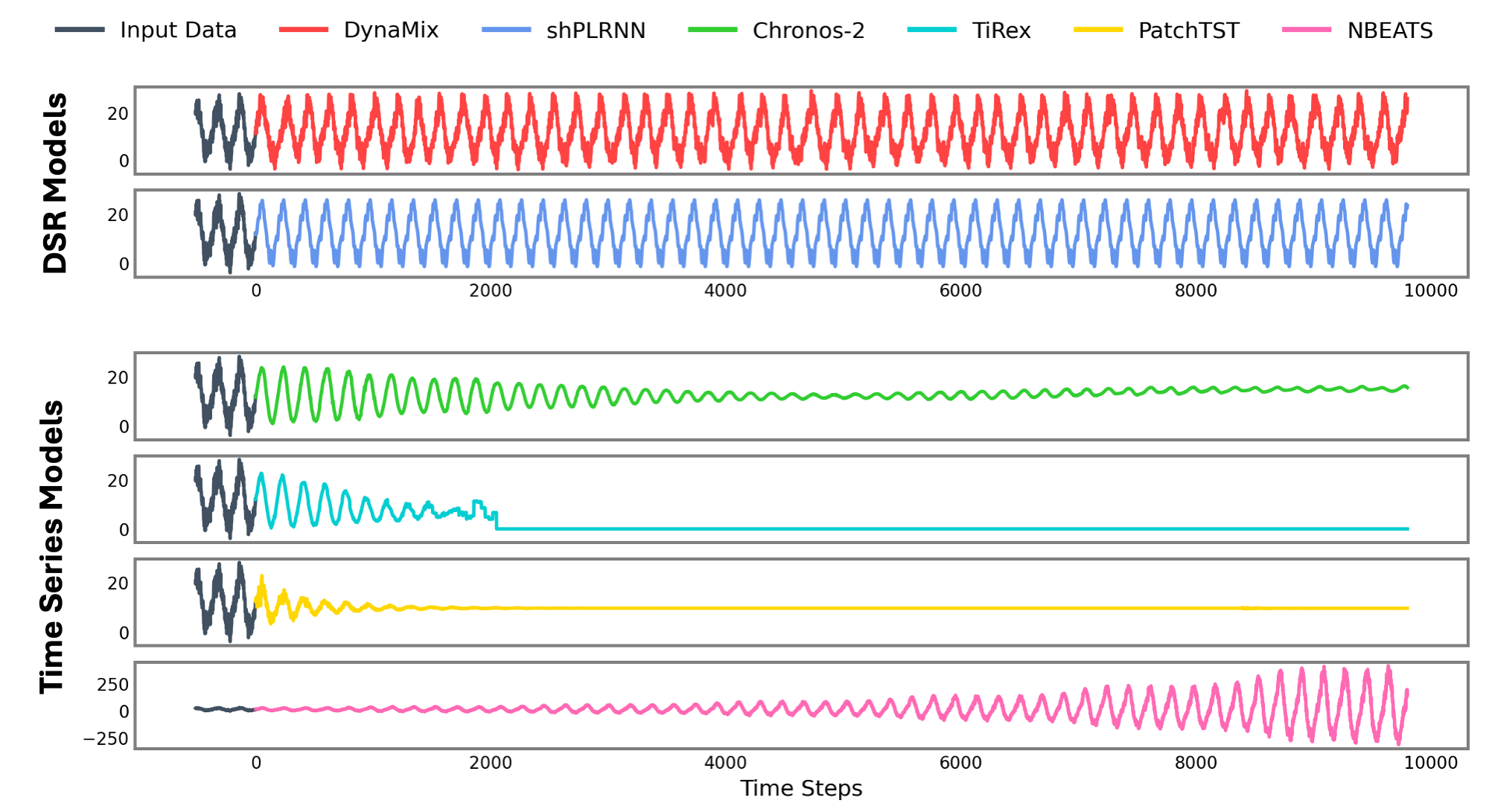
A new perspective on time series analysis argues that understanding the underlying system dynamics, rather than simply forecasting future values, is crucial for robust and generalizable models.
![The Conditional Flow Matching (CFM) framework synthesizes grasps by learning a continuous transformation-guided by a conditional velocity field [latex]\mathbf{v}_{\theta}[/latex]-from initial rigid poses generated by Anygrasp [latex]\mathcal{G}_{\text{Anygrasp}}[/latex] to target soft gripper poses [latex]\mathcal{G}_{\text{CFM}}[/latex], a process parameterized by a feed-forward MLP and conditioned on scene geometry encoded by a U-Net autoencoder into a latent vector.](https://arxiv.org/html/2602.17110v1/x2.png)
New research demonstrates a method for transferring grasp planning from traditional rigid robot grippers to the more versatile, but challenging, domain of soft robotics.
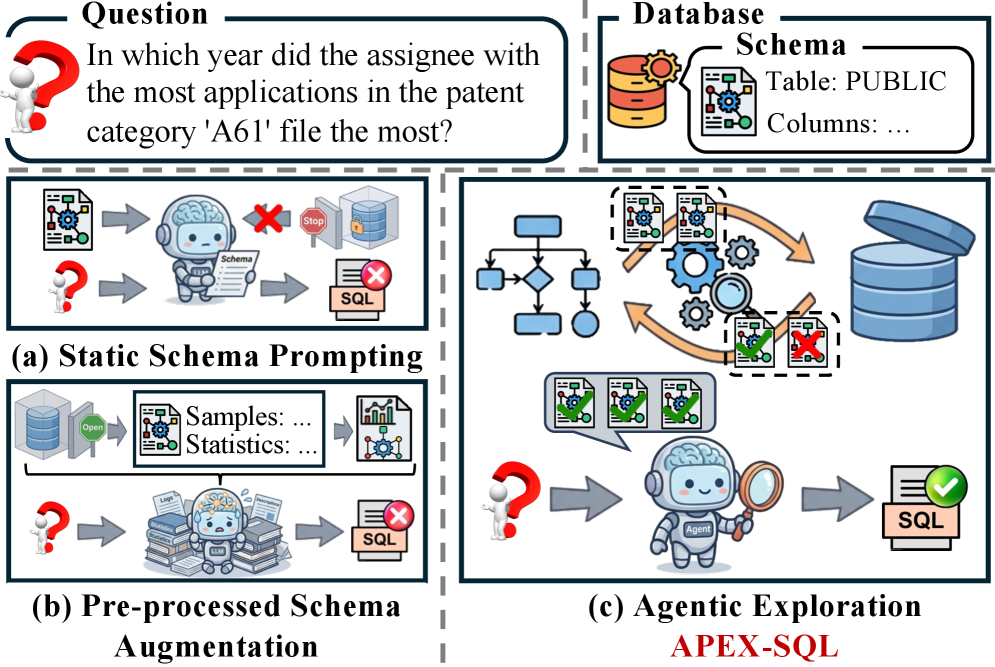
A new framework, APEX-SQL, improves the accuracy of converting natural language questions into database queries by actively learning and validating its assumptions about the underlying data.
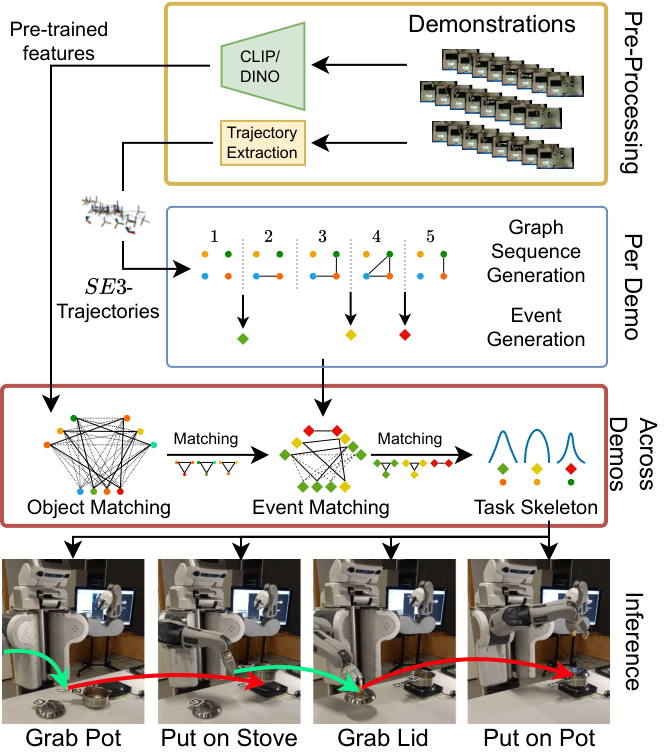
A new approach enables robots to infer complex tasks by observing just a few demonstrations, focusing on how objects relate and change during execution.
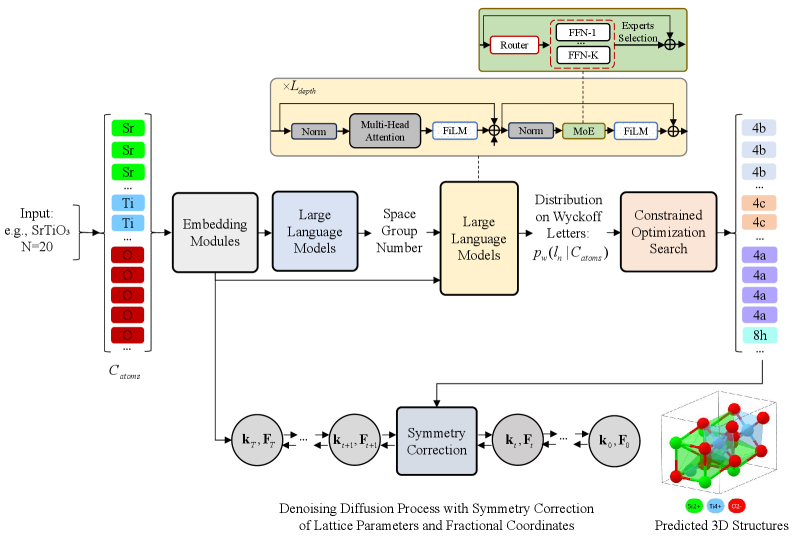
A new generative AI framework harnesses the power of crystal symmetry to dramatically improve the prediction of stable and novel materials.
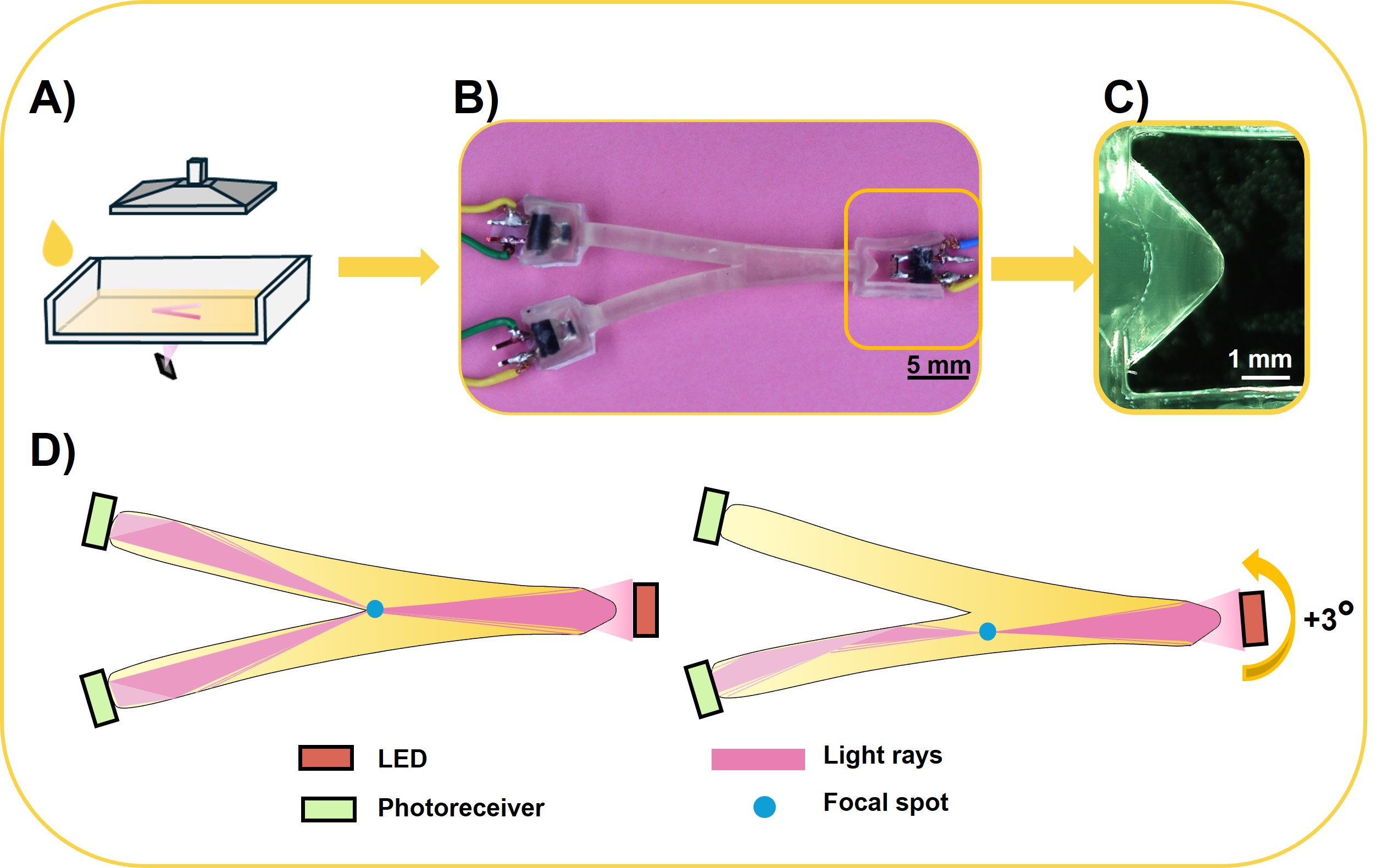
Researchers have developed a new soft optical sensor with an integrated lens, enabling improved light control and precision in mechanosensing applications.
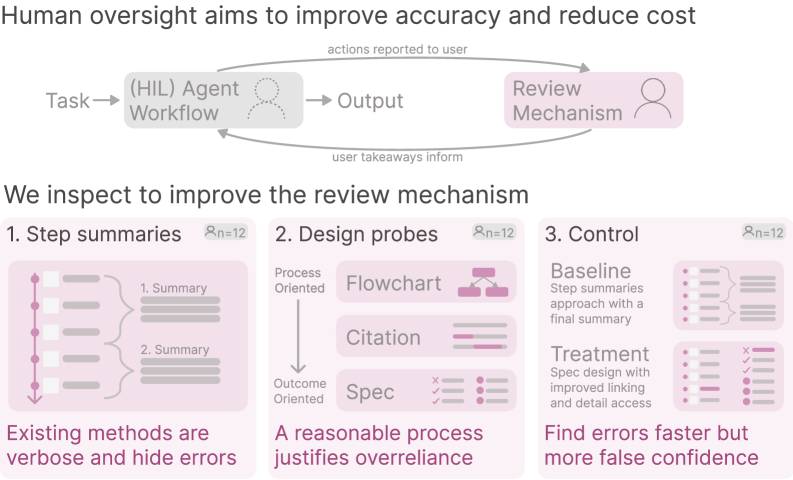
As increasingly complex AI agents take on critical tasks, ensuring effective human oversight becomes paramount, but constant monitoring isn’t scalable.