Robotics’ Reliability Challenge: Testing Before the Robots Take Over
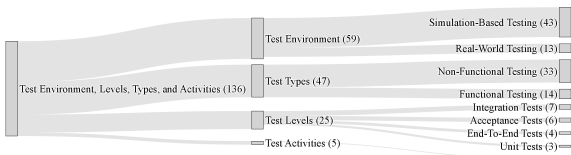
As robots become increasingly autonomous, ensuring their software is rigorously tested is paramount, and this review examines the current state of robotics testing practices.
As robots become increasingly autonomous, ensuring their software is rigorously tested is paramount, and this review examines the current state of robotics testing practices.
Effective AI oversight demands a fundamental shift from debating what regulations are needed to building the legal systems that will actually deliver them.

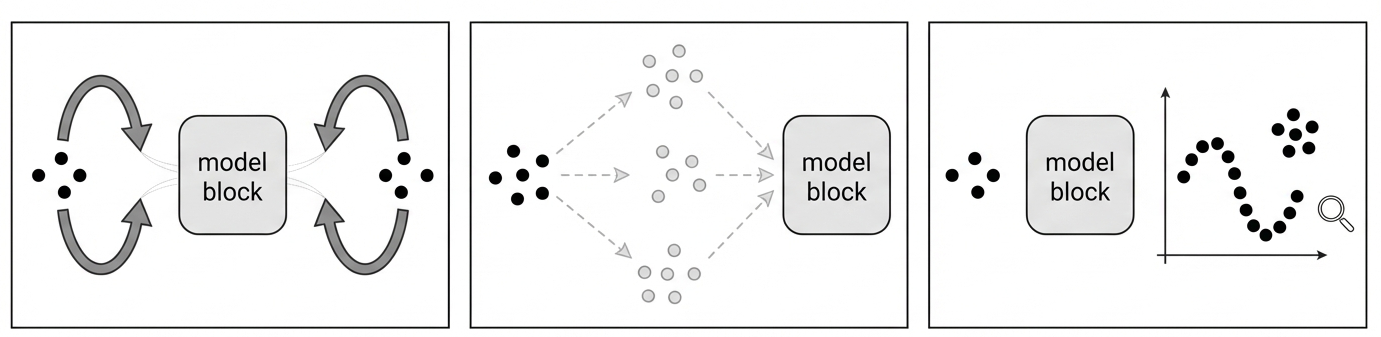
Researchers have developed a neural simulator that learns to accurately model the complex dynamics of deformable objects manipulated by robots, bridging the gap between simulation and real-world performance.
Researchers are harnessing the power of artificial intelligence to identify underlying symmetries and reduce complexity in datasets, offering a novel approach to understanding the fundamental structure of physical phenomena.
Researchers have developed a full-stack system that allows humanoid robots to learn complex interaction skills directly from human videos, bypassing the need for laborious task-specific programming.
A new wave of artificial intelligence techniques is transforming how we understand and predict the behavior of materials under stress.
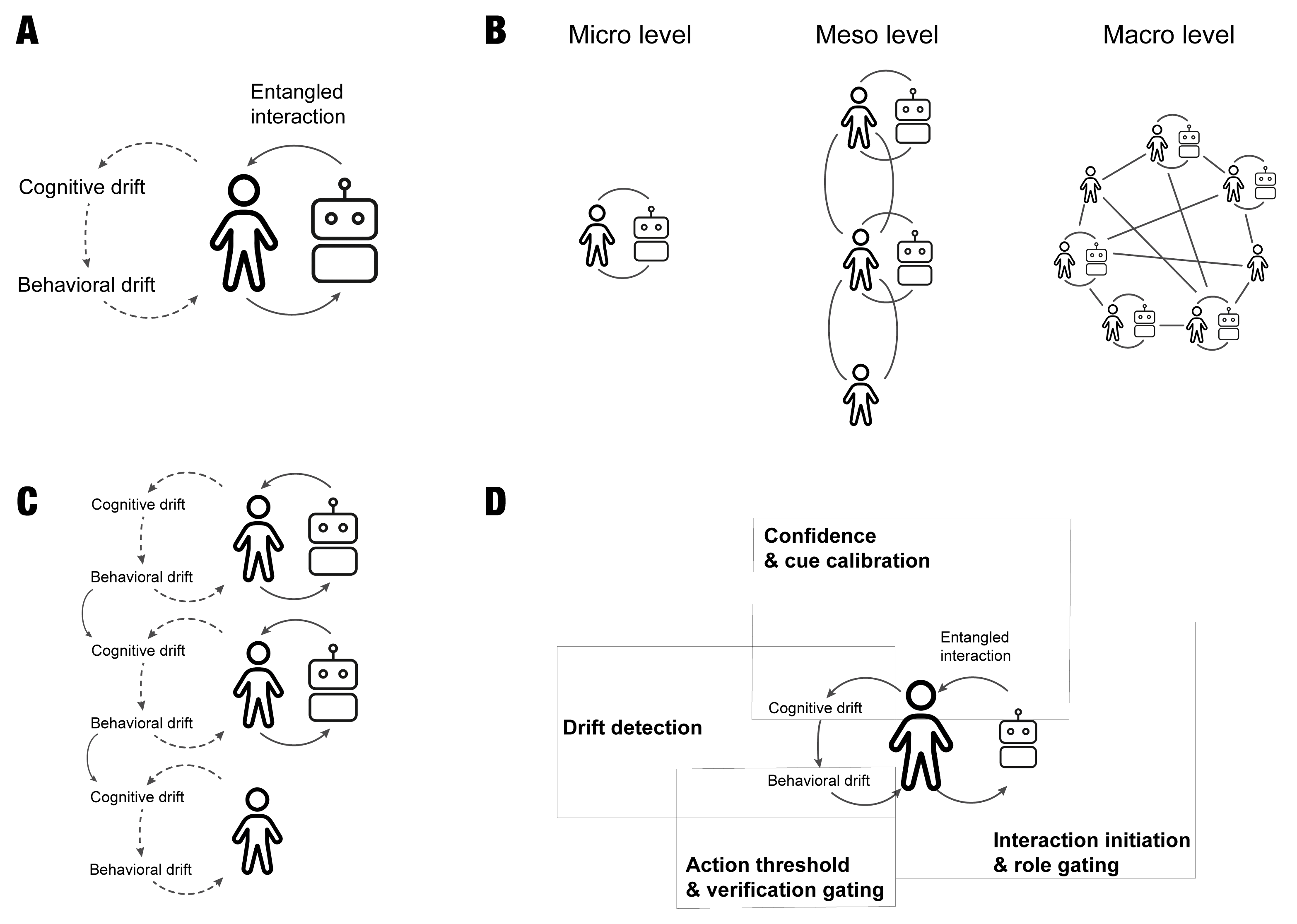
Sustained collaboration with artificial intelligence isn’t just changing what we do, but how we think, necessitating new strategies for self-awareness and cognitive resilience.

A new vision for materials science leverages intelligent AI agents to orchestrate experiments, curate data, and ultimately design novel materials with minimal human intervention.
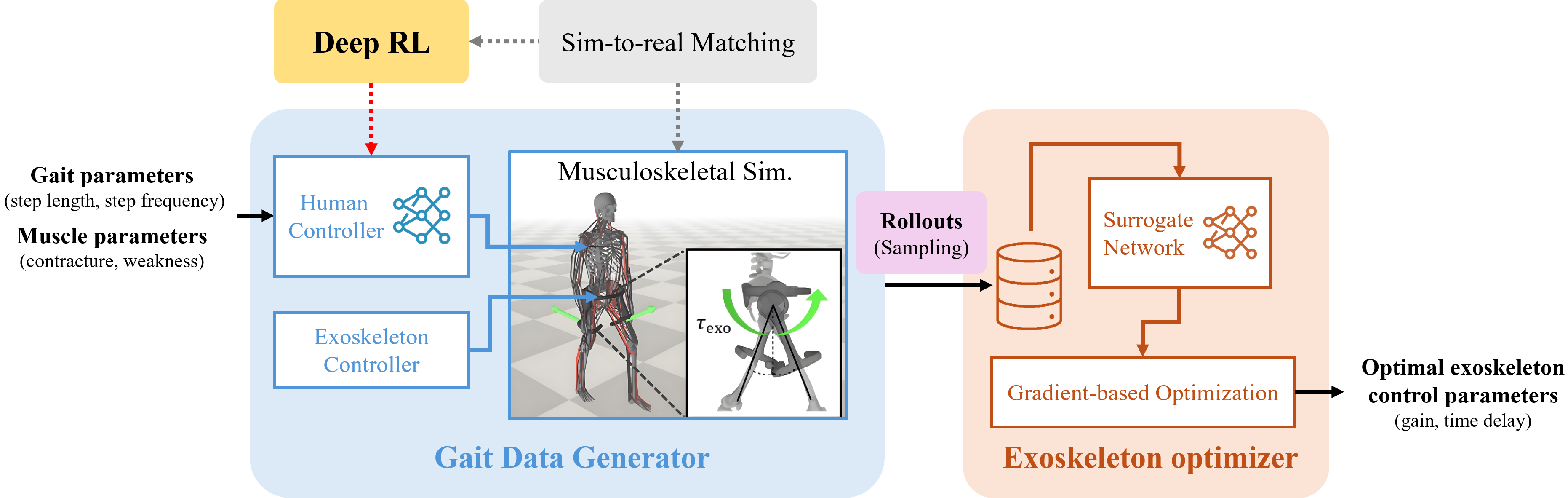
A new simulation framework uses AI to optimize exoskeleton control, potentially streamlining development and personalization for a wider range of users.
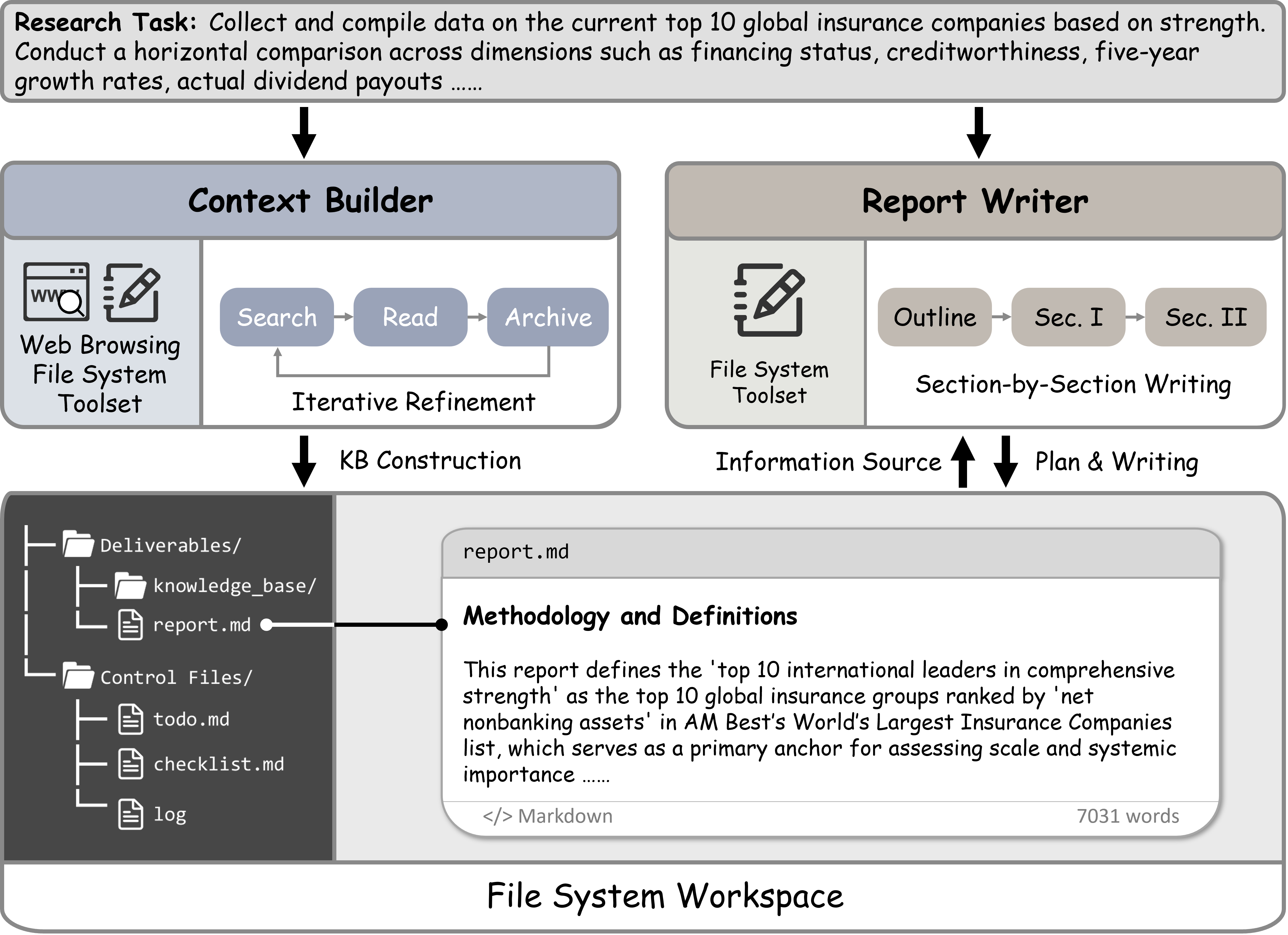
A new framework empowers artificial intelligence agents to conduct extended, iterative research by leveraging a file-system workspace to overcome the limitations of short-term memory.