Navigating the Long Read: Smarter Document Search with AI Agents
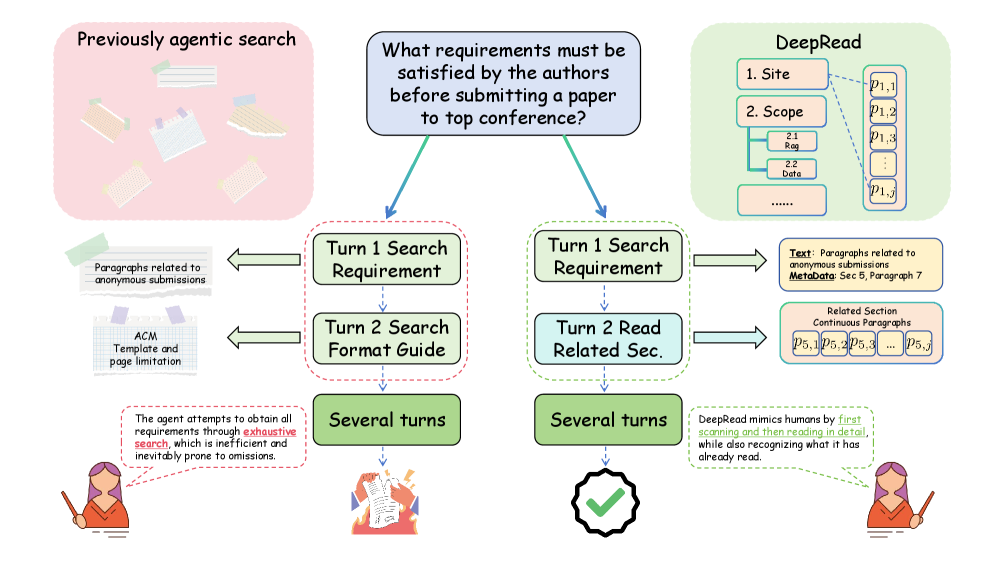
A new framework improves question answering over lengthy documents by understanding their structure and intelligently navigating content.
A new framework improves question answering over lengthy documents by understanding their structure and intelligently navigating content.
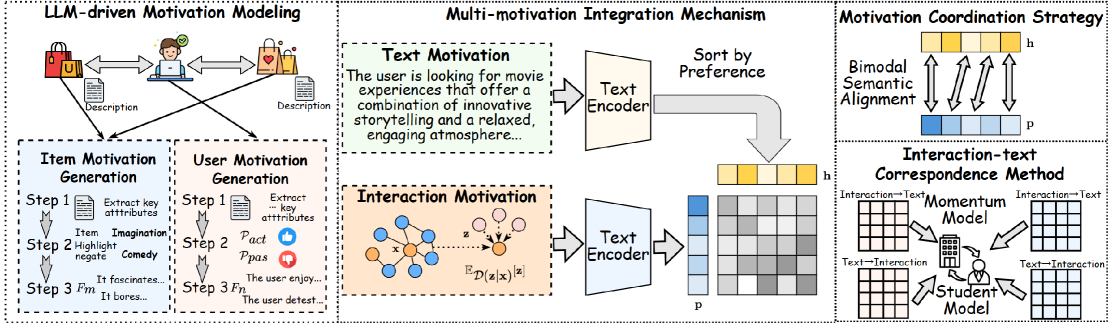
Researchers have developed a system that uses the power of large language models to decipher user motivations from reviews and behavior, leading to more relevant and effective recommendations.
New research bridges causal inference and stochastic modeling to reveal the underlying mechanisms generating complex event sequences.
![Despite all BusyBox configurations being within the training data’s affordance distribution, the algorithms [latex]\pi_{0.5}\pi_{0.5}-canon[/latex] and GR00T-N1.6-canon demonstrated robust performance only with visually familiar canonical configurations, revealing a significant failure to generalize to even slightly altered, out-of-distribution visual arrangements of the same underlying affordances.](https://arxiv.org/html/2602.05441v1/figures/res_fully_s.jpeg)
New research reveals that even advanced AI-powered robots struggle to reliably perform simple physical tasks when faced with slight variations in their environment.
![The STProtein training framework leverages a multi-stage approach-initial protein structure prediction, followed by iterative refinement using [latex] \nabla_{\theta} L(\theta, x) [/latex]-to sculpt protein conformations capable of fulfilling designated functional requirements, ultimately demonstrating an adaptive system responding to the inherent entropy of structural possibilities.](https://arxiv.org/html/2602.05811v1/images/structure/framework4.jpg)
Researchers have developed a powerful new method to predict where proteins are located within tissues, even when direct protein measurements are limited.
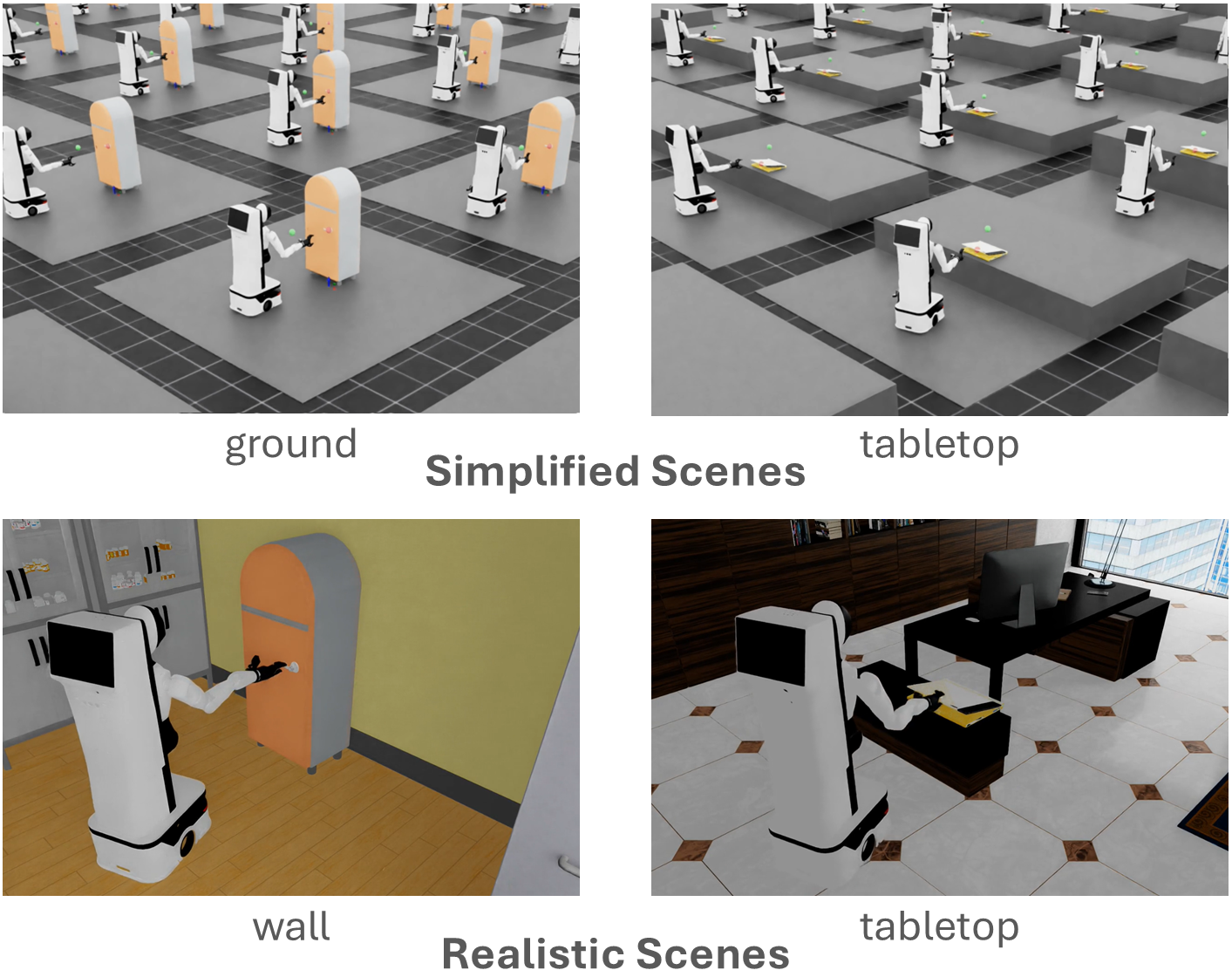
A new benchmark dataset and simulation environment aims to accelerate the development of more adaptable and reliable mobile robots capable of complex physical tasks.
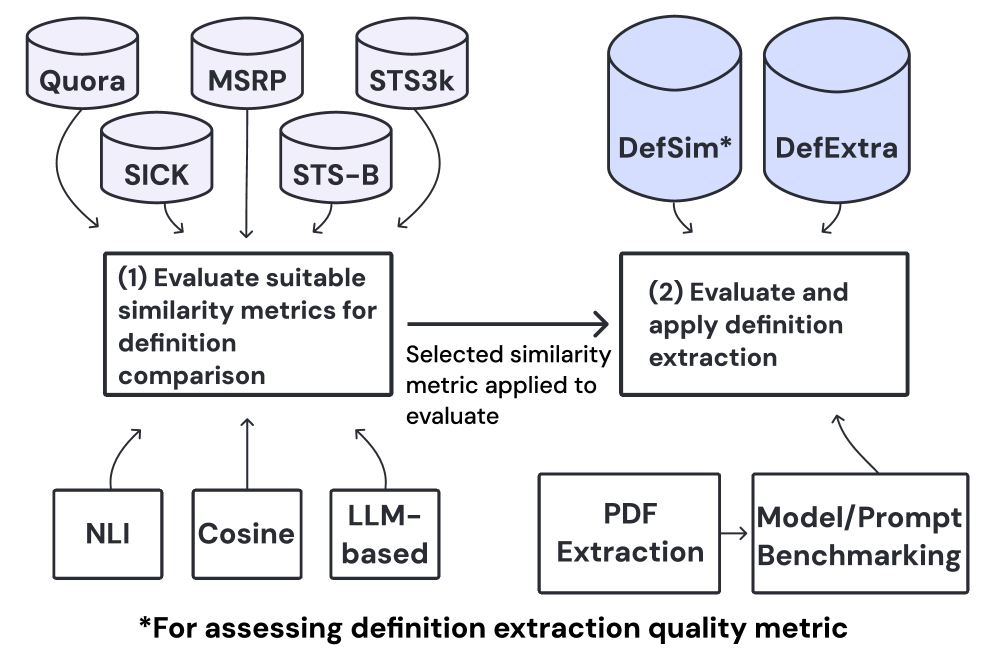
A new approach uses the power of large language models to systematically extract definitions from the vast body of academic literature.
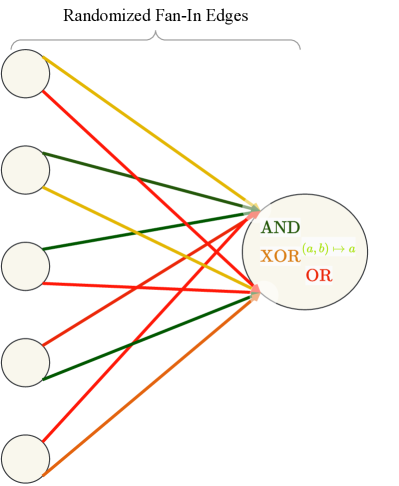
Researchers have developed a novel neural network architecture that bridges the gap between the reliability of formal logic and the adaptability of machine learning.
![Ontological concepts, while seemingly disparate across perspectives, ultimately converge upon a shared foundation of formalized relationships, demonstrable through the consistent application of [latex] \lambda x . \phi(x) [/latex] to define object properties and their interactions within a logically consistent framework.](https://arxiv.org/html/2602.05456v1/ontology_all_perspectives_new.png)
A novel methodology streamlines the development of robotic systems by translating high-level objectives into executable code with formal guarantees.
A new systematic review and meta-analysis suggests that patients often perceive AI-powered chatbots as displaying greater empathy in text-based interactions than their human healthcare providers.