Charting a Faster Course: Multi-Graph Search for Robot Navigation
A new motion planning framework dramatically improves efficiency by simultaneously exploring multiple potential paths for robots operating in complex, high-dimensional spaces.
A new motion planning framework dramatically improves efficiency by simultaneously exploring multiple potential paths for robots operating in complex, high-dimensional spaces.
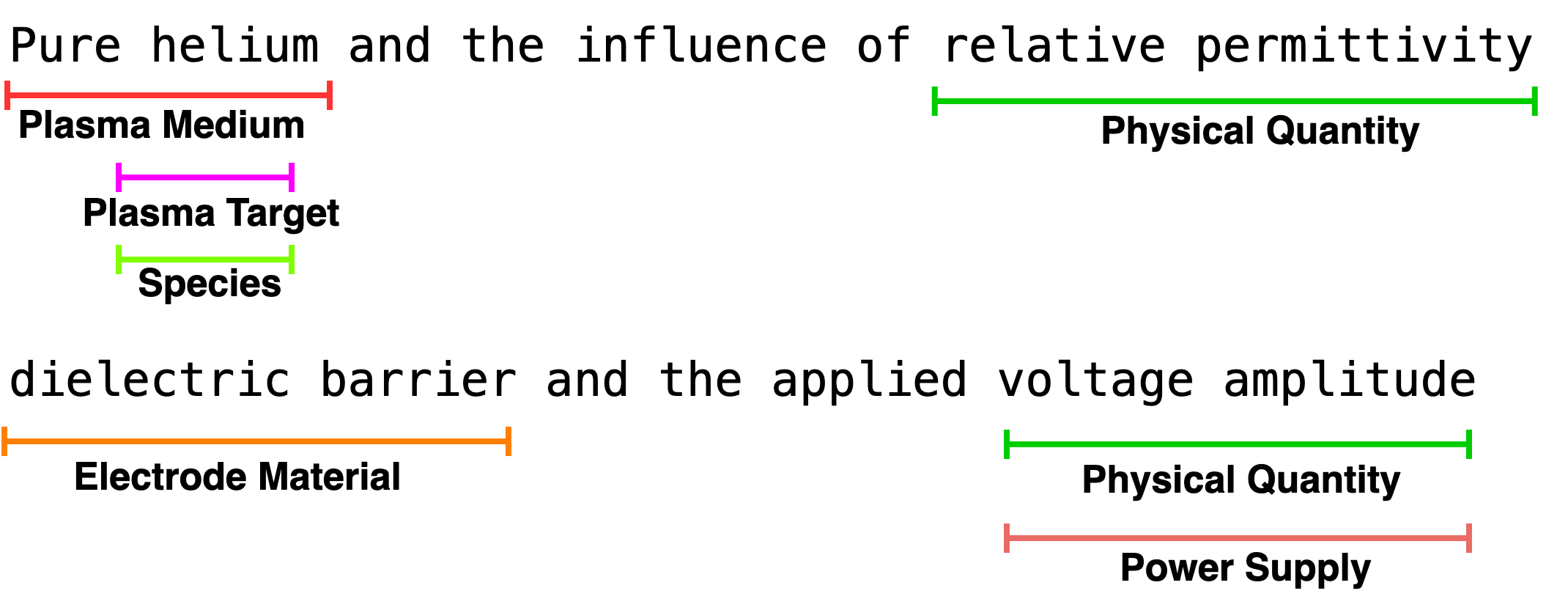
A new approach to information extraction leverages artificial intelligence to identify and categorize key concepts within complex research articles.
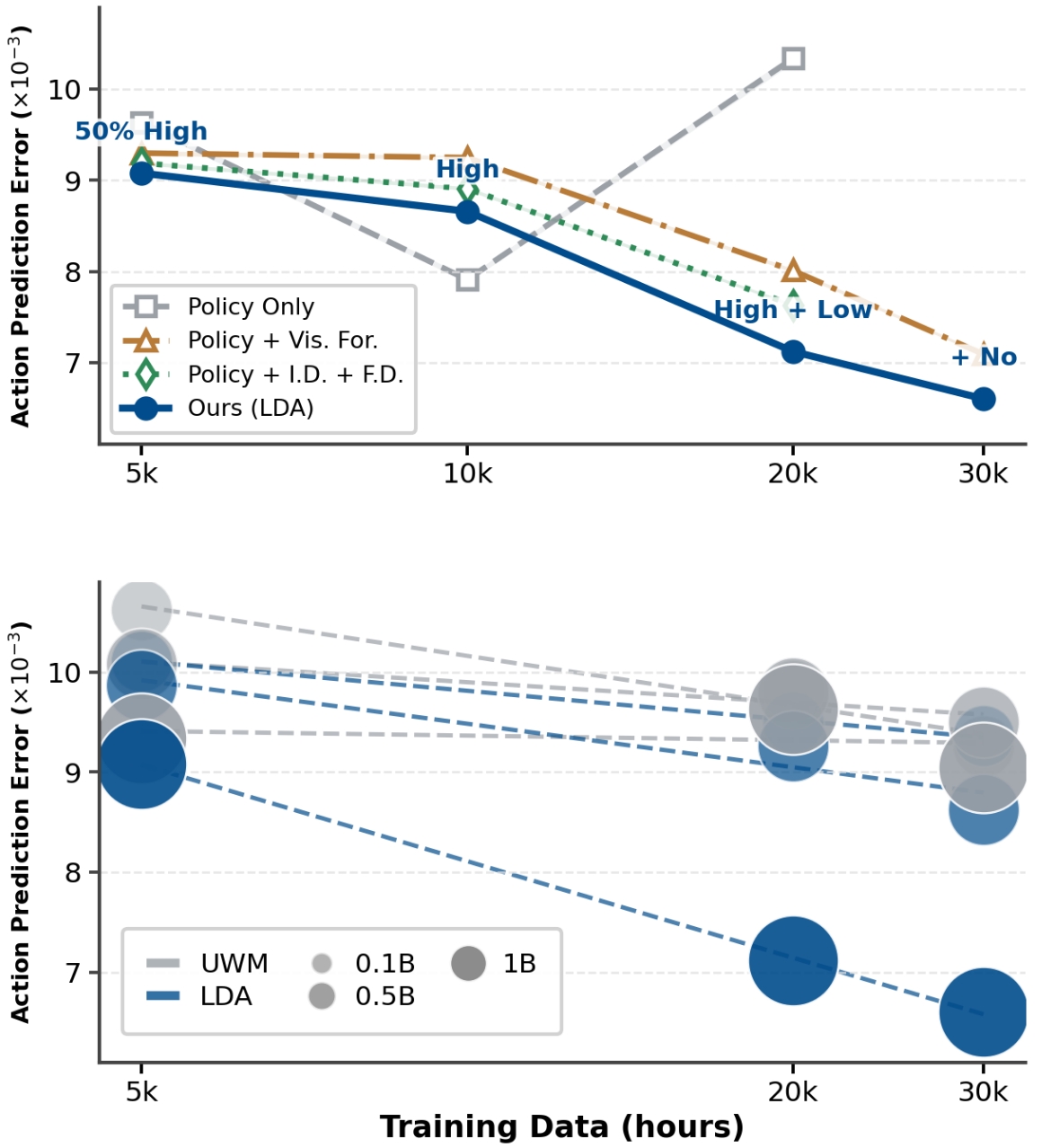
A new foundation model, LDA-1B, is pushing the boundaries of embodied AI by learning robust interaction dynamics from a vast and diverse range of real-world robot data.
A new system called Althea demonstrates that collaborative exploration, rather than simple AI assistance, is key to improving critical thinking and building trust in information.
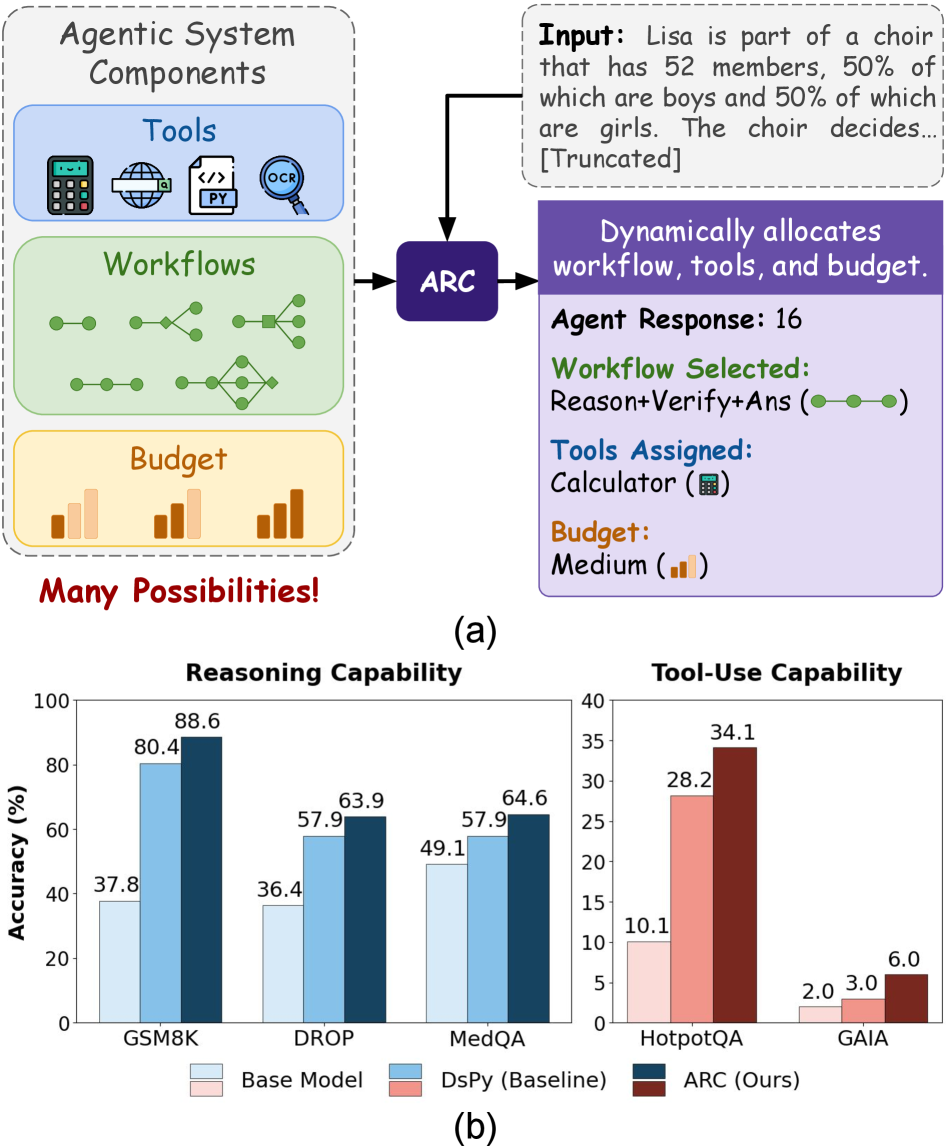
New research details a framework for automatically optimizing the workflows and instructions of AI agents powered by large language models.
![Delegate agents demonstrably improve trade outcomes by consistently proposing offers that yield a significant increase in receiver surplus-a statistically significant shift not observed in non-AI-assisted scenarios [latex] (p<0.01) [/latex], suggesting a capacity for mutually beneficial negotiation.](https://arxiv.org/html/2602.12089v1/figs/spillover.png)
New research explores how different levels of AI involvement in multi-party bargaining – from advice to full delegation – impacts strategic choices and overall outcomes.
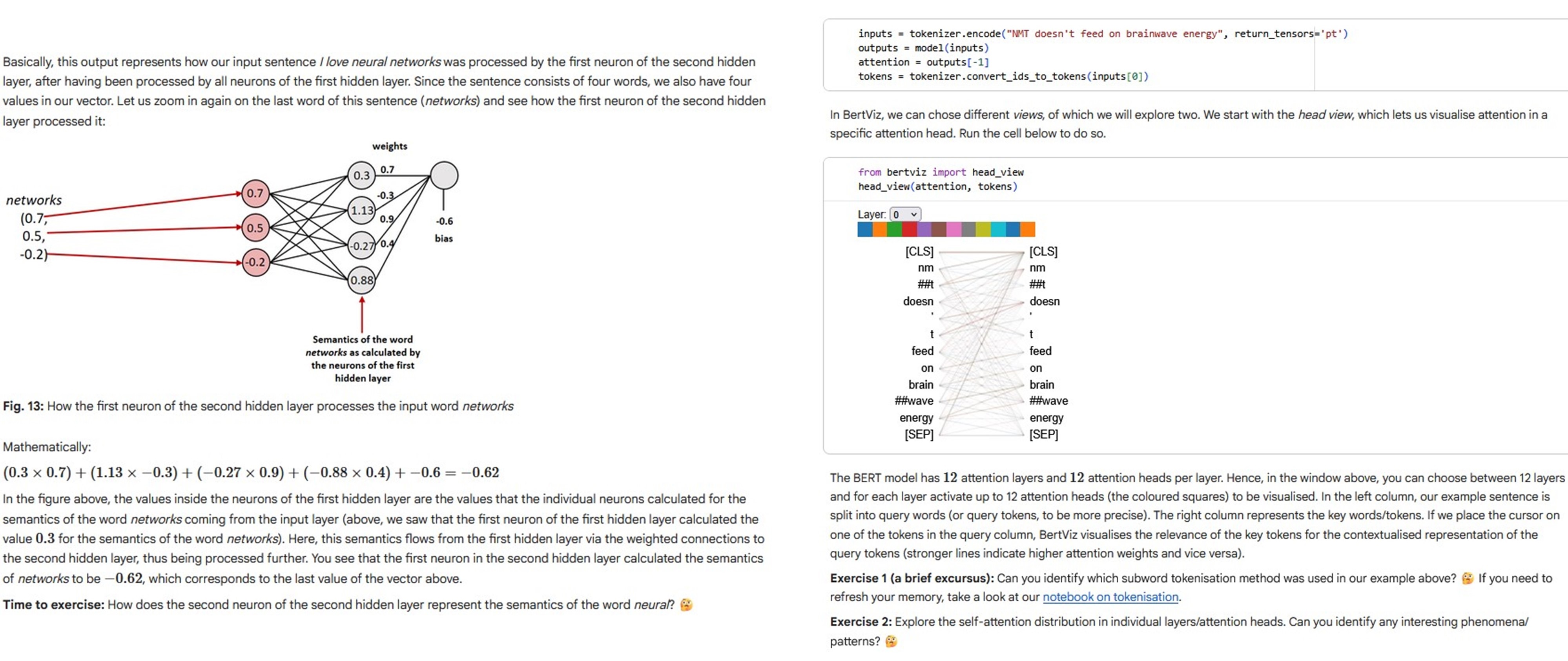
A new technical curriculum aims to equip translators and communicators with the skills needed to navigate the rapidly evolving landscape of language-oriented artificial intelligence.
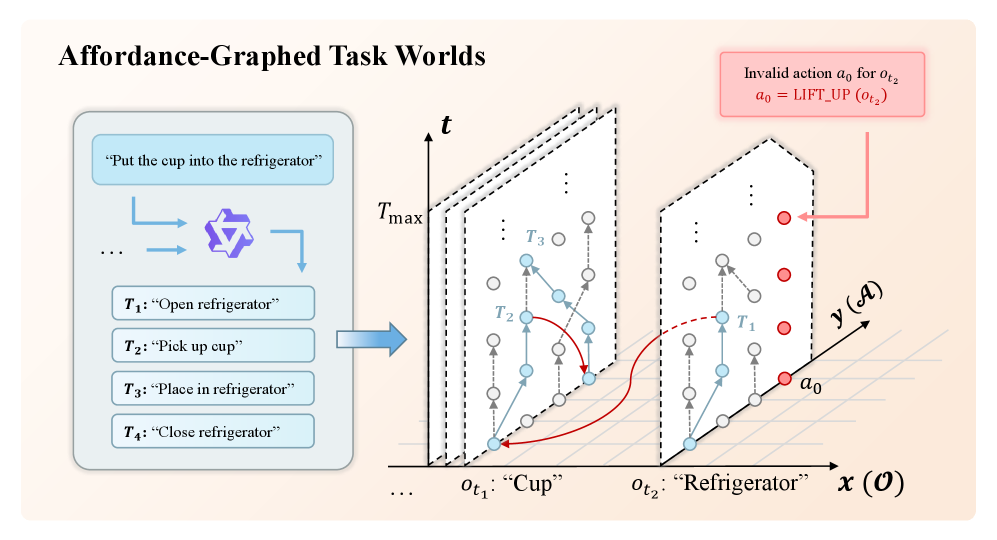
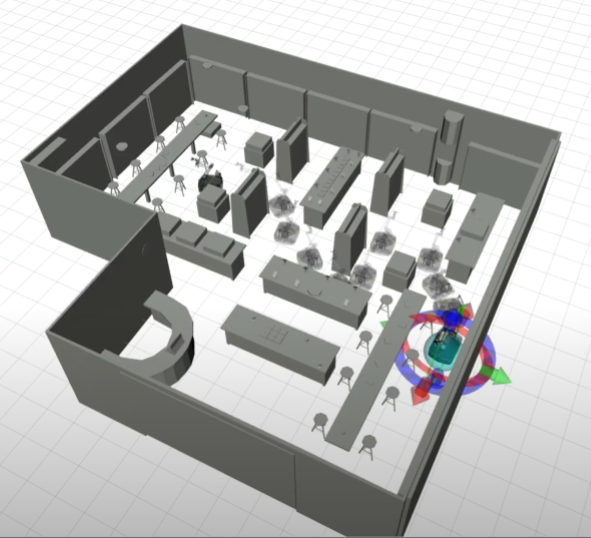
Researchers have developed a system that allows robots to generate increasingly complex environments and tasks, enabling more robust learning for long-horizon challenges.
Generative AI is flooding the art world with images, but a critical look reveals a troubling tendency towards superficiality and the normalization of kitsch.
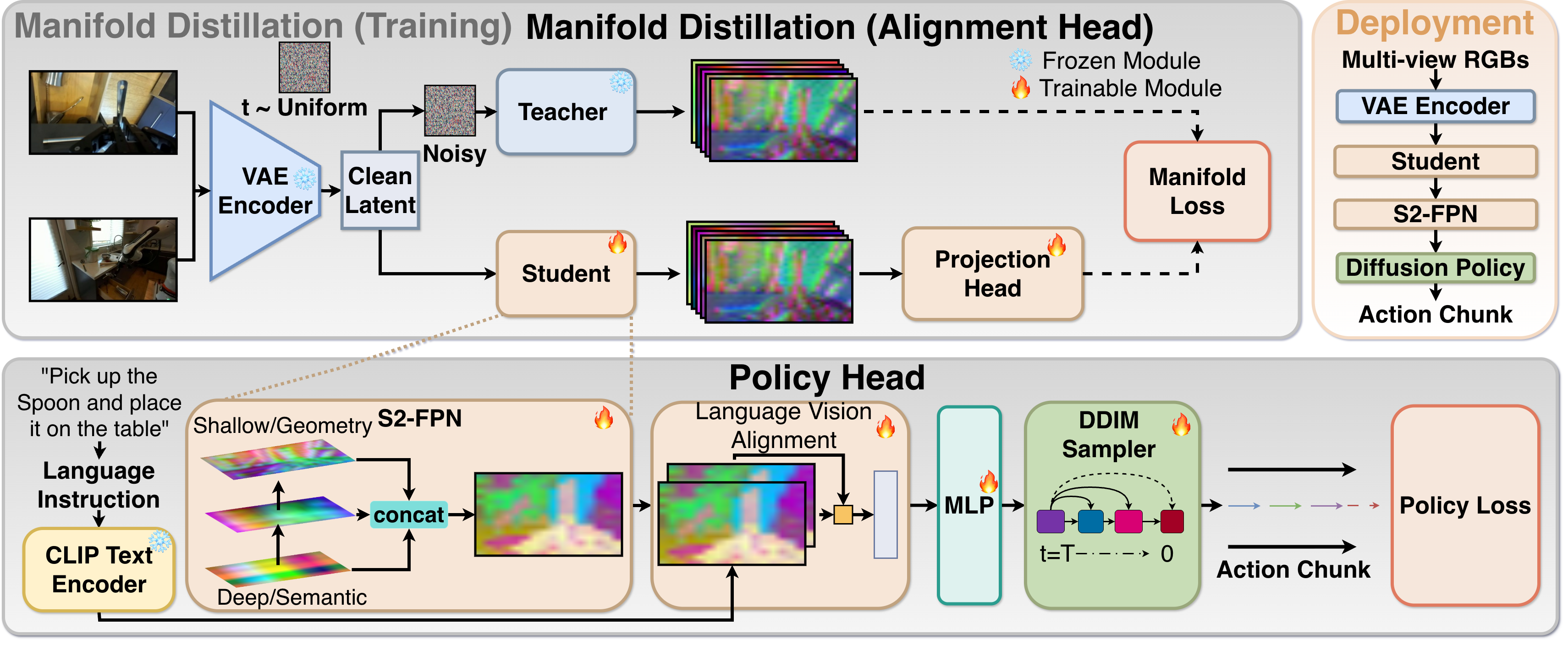
Researchers have developed a new framework that imbues robots with improved geometric understanding by distilling knowledge from powerful diffusion models.