Unlocking Mobile App Coverage with AI

A new framework leverages artificial intelligence to automatically explore and test previously unreachable code within Android applications.
A new framework leverages artificial intelligence to automatically explore and test previously unreachable code within Android applications.

New research explores how large language models can move beyond simply answering questions to actively seeking clarification, dramatically improving their performance on complex reasoning tasks.

New research demonstrates how generative artificial intelligence can significantly streamline the creation of domain-driven design models, offering a pathway to faster and more efficient software development.
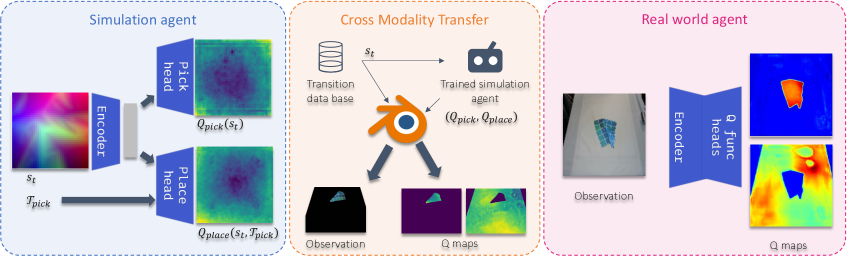
Researchers have developed a new reinforcement learning approach that improves data efficiency in teaching robots to manipulate cloth, even without human demonstrations.
A new framework dramatically improves the efficiency of AI agents by consolidating repetitive tasks and reducing reliance on costly large language model calls.
A new artificial intelligence model accurately forecasts biochemical recurrence after prostatectomy by analyzing microscopic images of biopsy samples.
A new approach leverages the power of mixture-of-experts to significantly improve robotic surgery policies, even with limited training data.

A new approach filters unnecessary information in neural networks to boost the performance and efficiency of robot manipulation policies.
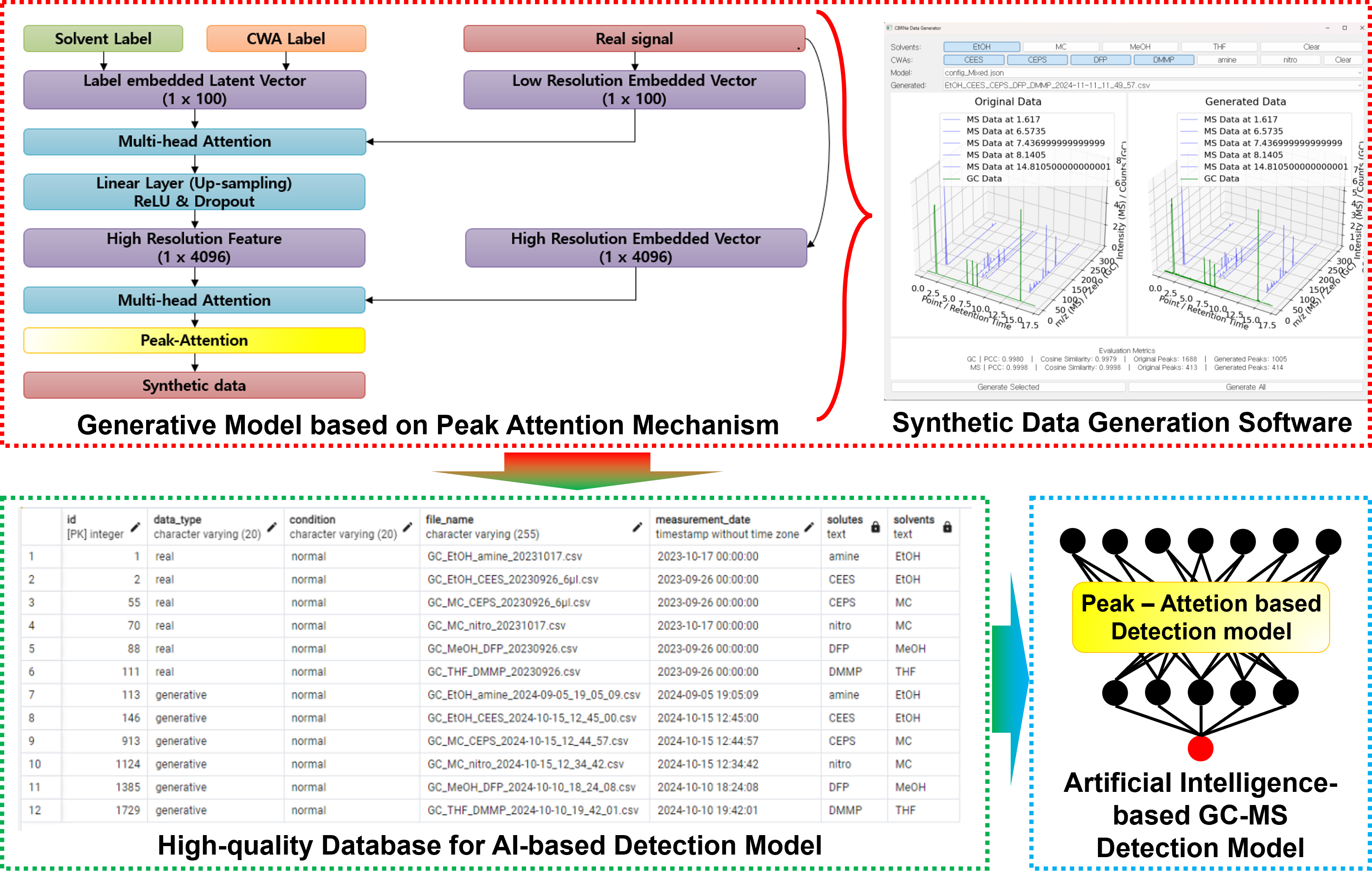
A new generative framework leverages attention mechanisms to create realistic data, bolstering the accuracy of chemical analysis even with complex interference.
![The system orchestrates a feedback loop where sensory data-specifically puck and end-effector positions [latex] (x_p, y_p, v_x, v_y, x_{ee}, y_{ee}) [/latex]-is translated into spike trains, processed by silicon neurons within a DYNAP-SE reservoir, and ultimately decoded into discrete motion primitives [latex] (q_1, q_2, q_3) [/latex] driving robot joint commands, all within a 1.038m x 1.948m environment designed to guide a puck towards designated arrival points through Action 0 or 1.](https://arxiv.org/html/2601.21548v1/img/figure1.png)
Researchers have successfully trained a small-scale neuromorphic chip to control a robot playing air hockey, demonstrating the potential of event-driven processing for real-time robotic applications.