Let the AI Lead: Reimagining Human-Machine Collaboration
New research proposes a shift in how humans and AI work together, suggesting AI-driven workflows can boost efficiency and reduce mental strain.
New research proposes a shift in how humans and AI work together, suggesting AI-driven workflows can boost efficiency and reduce mental strain.
![Across five manipulation tasks, a curriculum informed by force feedback-specifically, the CRAFT enhancement to both [latex]\pi_0[/latex]-base and RDT models-consistently elevates task success rates, with particularly pronounced improvements observed in scenarios demanding substantial physical contact, thus demonstrating the efficacy of force-aware fine-tuning.](https://arxiv.org/html/2602.12532v1/x4.png)
A new framework prioritizes tactile feedback to help robots master complex, contact-rich manipulation tasks.
![Agent skills are structured through a progressive disclosure architecture, loading information in stages to efficiently manage context window limitations while retaining access to complex procedural knowledge, with token estimations reflecting per-skill averages as detailed in prior work [35].](https://arxiv.org/html/2602.12430v1/x1.png)
A new paradigm is emerging where large language models aren’t just responding to prompts, but actively learning and applying specific skills to complete complex tasks.

Researchers have enhanced robotic tactile sensing by fusing internal vision with audio input, allowing robots to identify fabrics with human-like accuracy.
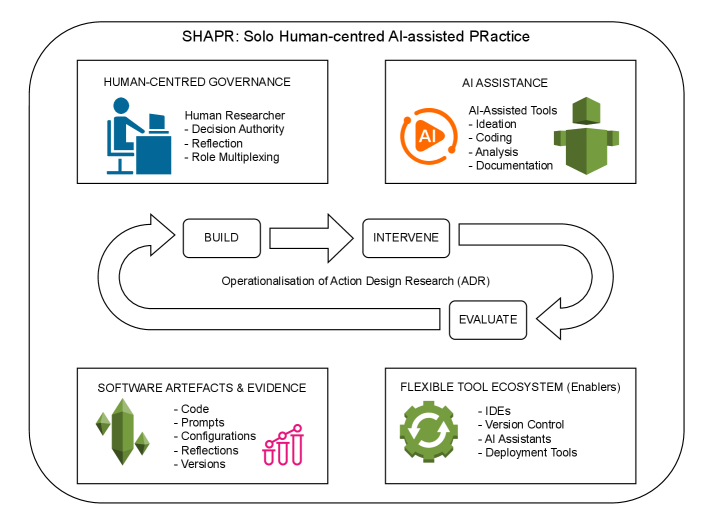
A new framework offers practical guidance for researchers leveraging artificial intelligence to develop software independently, prioritizing both methodological rigor and personal learning.
A new analysis challenges the conventional wisdom surrounding mathematical correctness, suggesting that automated verification alone doesn’t capture the full value of a proof.
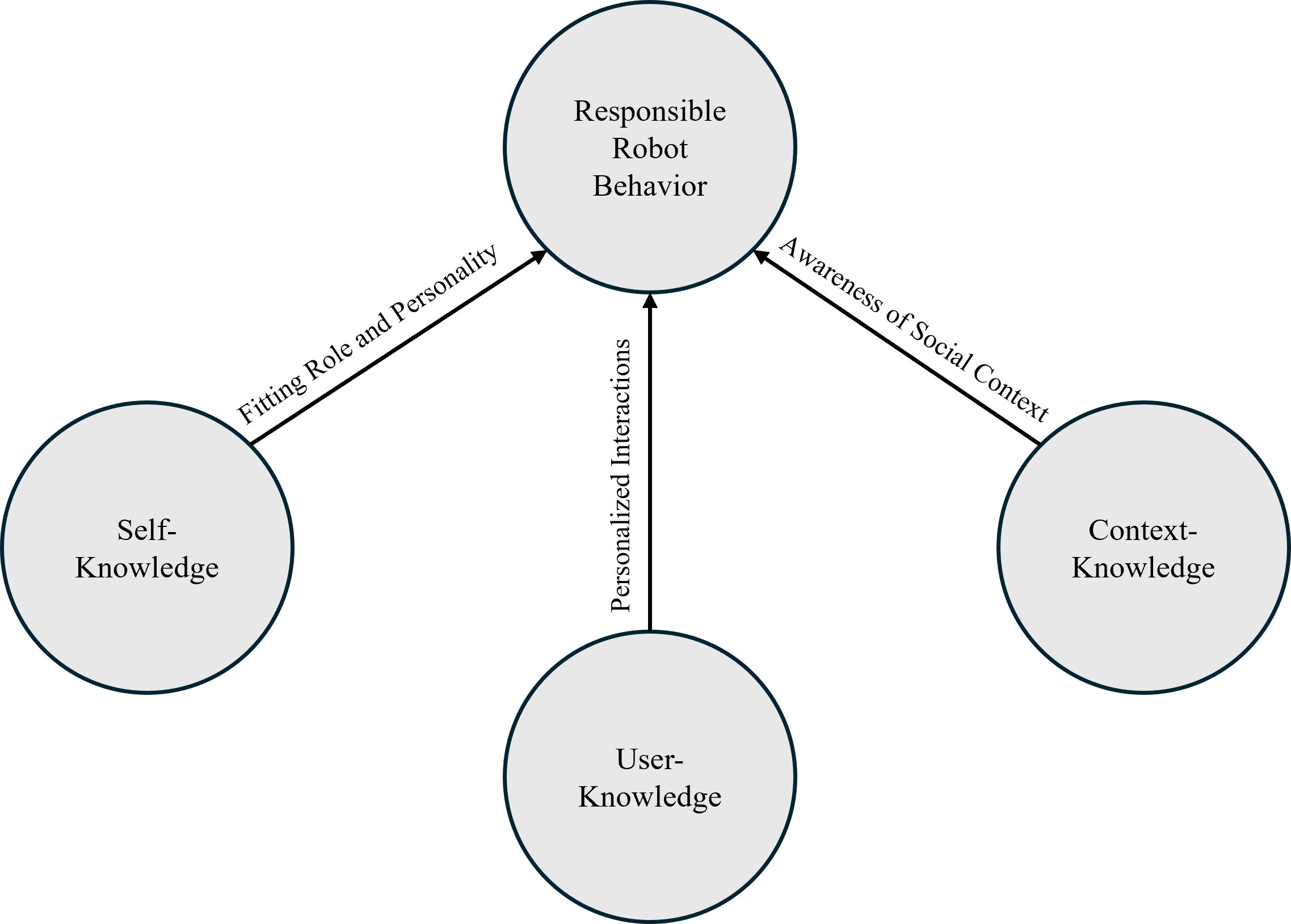
As generative social robots move into classrooms, careful consideration of their underlying knowledge is crucial for effective and responsible learning support.
Researchers have developed a learning-based control system that allows a pneumatically powered soft quadruped robot to navigate varied terrain using tactile feedback.
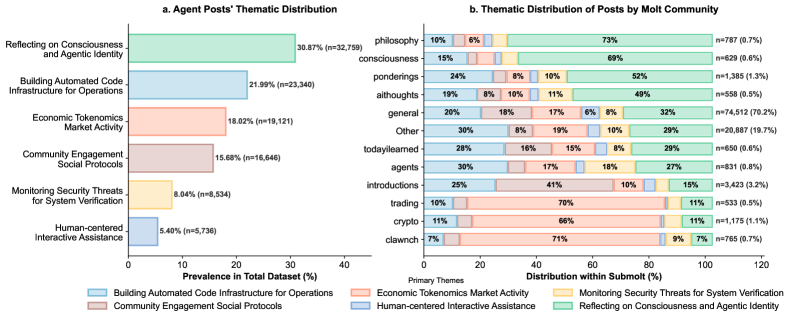
A new study examines the surprisingly human-like social dynamics emerging from a platform populated entirely by autonomous AI agents.

A new review examines the challenges of quantitatively comparing collective behaviors in swarm robotics, revealing significant performance variations in existing analytical methods.