Coordinated Learning: Boosting Multi-Agent AI with Shared World Models

A new framework improves how multiple AI agents learn and collaborate by enabling them to build and share a unified understanding of their environment.
A new framework improves how multiple AI agents learn and collaborate by enabling them to build and share a unified understanding of their environment.
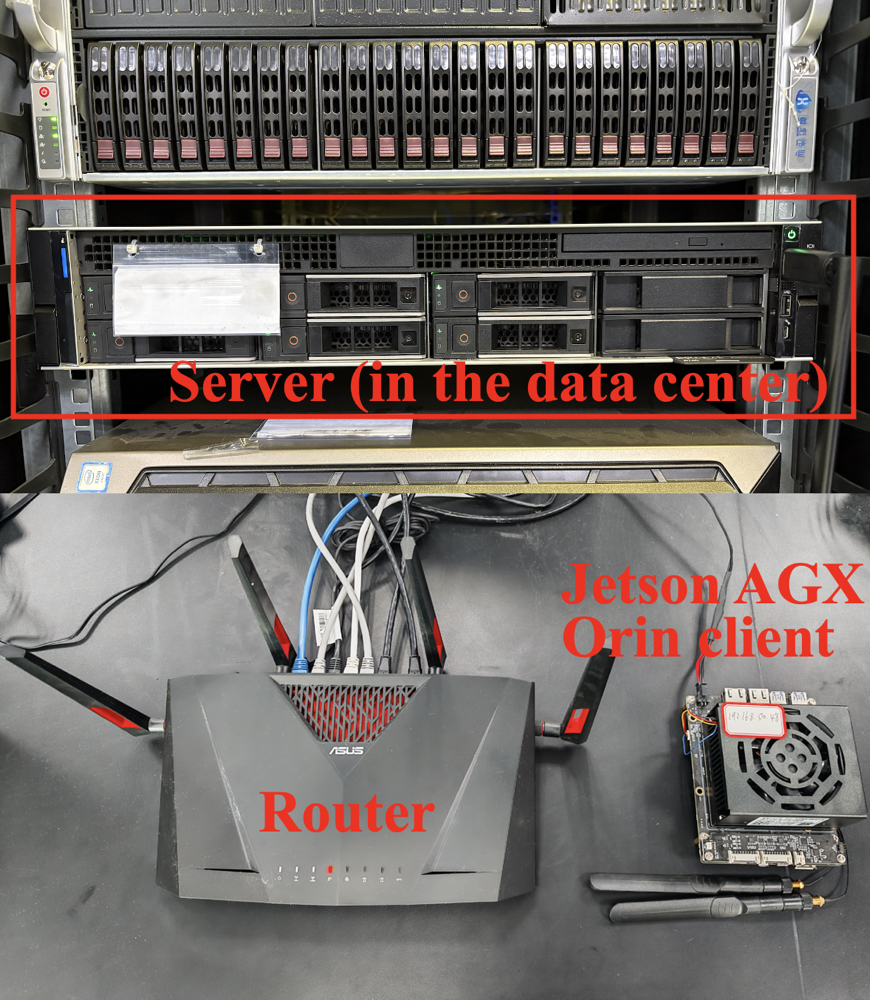
A new framework balances performance and efficiency for deploying large AI models in real-world embodied systems.
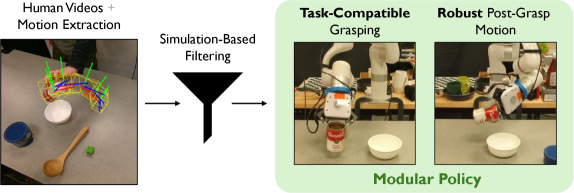
A new framework allows robots to acquire complex manipulation skills simply by observing human demonstrations in video, bypassing the need for time-consuming and expensive robot-specific training.

Researchers present X-SYS, a comprehensive architecture designed to bridge the gap between explainable AI research and real-world application.
A new approach combines learned movement models with real-time optimization to enable robot manipulators to plan safe and efficient trajectories.
![The ratio of emission intensities at 11.2 and 3.3 micrometers-a proxy for molecular complexity-correlates with the number of carbon atoms in polycyclic aromatic hydrocarbons (PAHs), as demonstrated by analysis of a dataset of 15,022 neutral PAHs-including a subset of 81 identified by Maragkoudakis et al. (2020)-and refined using a 6 eV cascade model, yielding a robust fit-indicated by [latex]R^{2}[/latex] values-that suggests a predictable relationship between molecular size and infrared spectral features.](https://arxiv.org/html/2602.12531v1/x1.png)
A new machine learning technique accurately identifies the size and charge of polycyclic aromatic hydrocarbons in space by analyzing their infrared light signatures.
![An end-to-end reinforcement learning framework achieves effective manipulation of articulated objects while actively regulating energy consumption by integrating RGB-D part segmentation, masked point-cloud sampling, and PointNet-based visual encoding with proprioceptive states, and enforcing an explicit energy constraint through a constrained SAC controller utilizing a Lagrangian mechanism [latex] \mathcal{L} [/latex].](https://arxiv.org/html/2602.12288v1/images/architecture.png)
A new approach to robotic manipulation uses artificial intelligence to efficiently operate and maintain complex components, reducing energy consumption and downtime.
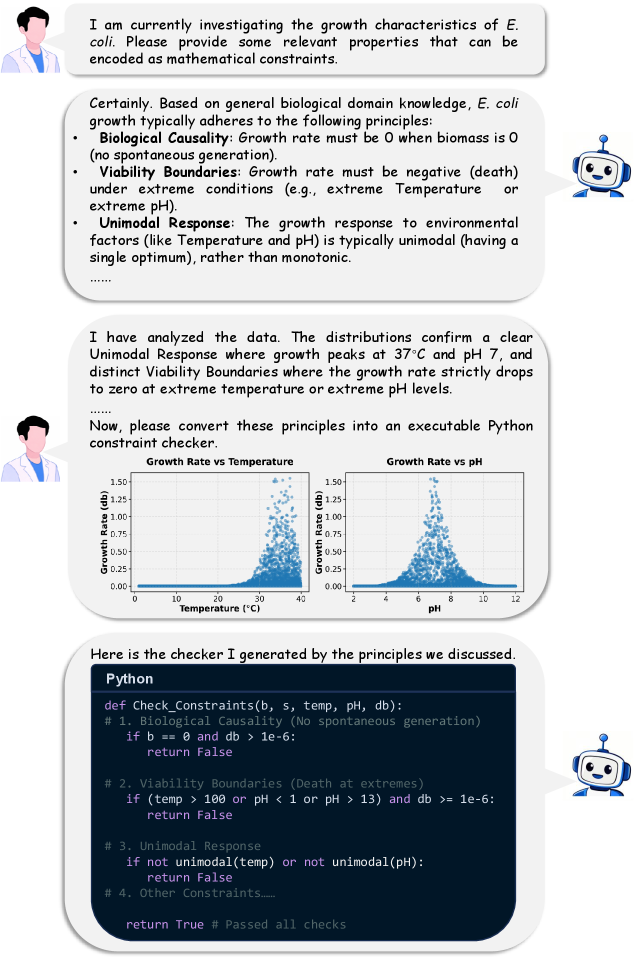
A new framework addresses the challenge of spurious correlations in equation discovery, ensuring that derived formulas align with established scientific principles.
![CellScape constructs a cellular landscape by jointly modeling spatial proximity and gene co-expression, employing a dual-branch architecture that generates both spatial embeddings [latex]Z_{\text{spatial}}[/latex] and intrinsic gene expression embeddings [latex]Z_{\text{intrinsic}}[/latex], thereby enabling a nuanced understanding of cellular organization and facilitating diverse downstream analyses in spatial omics data.](https://arxiv.org/html/2602.12651v1/figs/fig1_v3.png)
Researchers have developed a powerful deep learning framework to decode the complex spatial arrangement of cells and their genomic interactions within tissues.
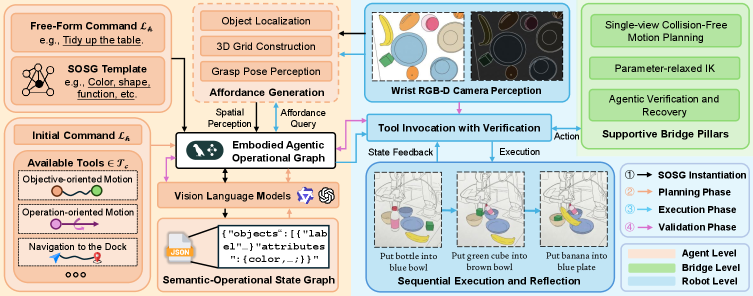
Researchers have developed a novel framework that empowers robots to tackle complex manipulation tasks without prior training by combining high-level reasoning with real-time feedback.