Bringing Social Robotics to the Masses
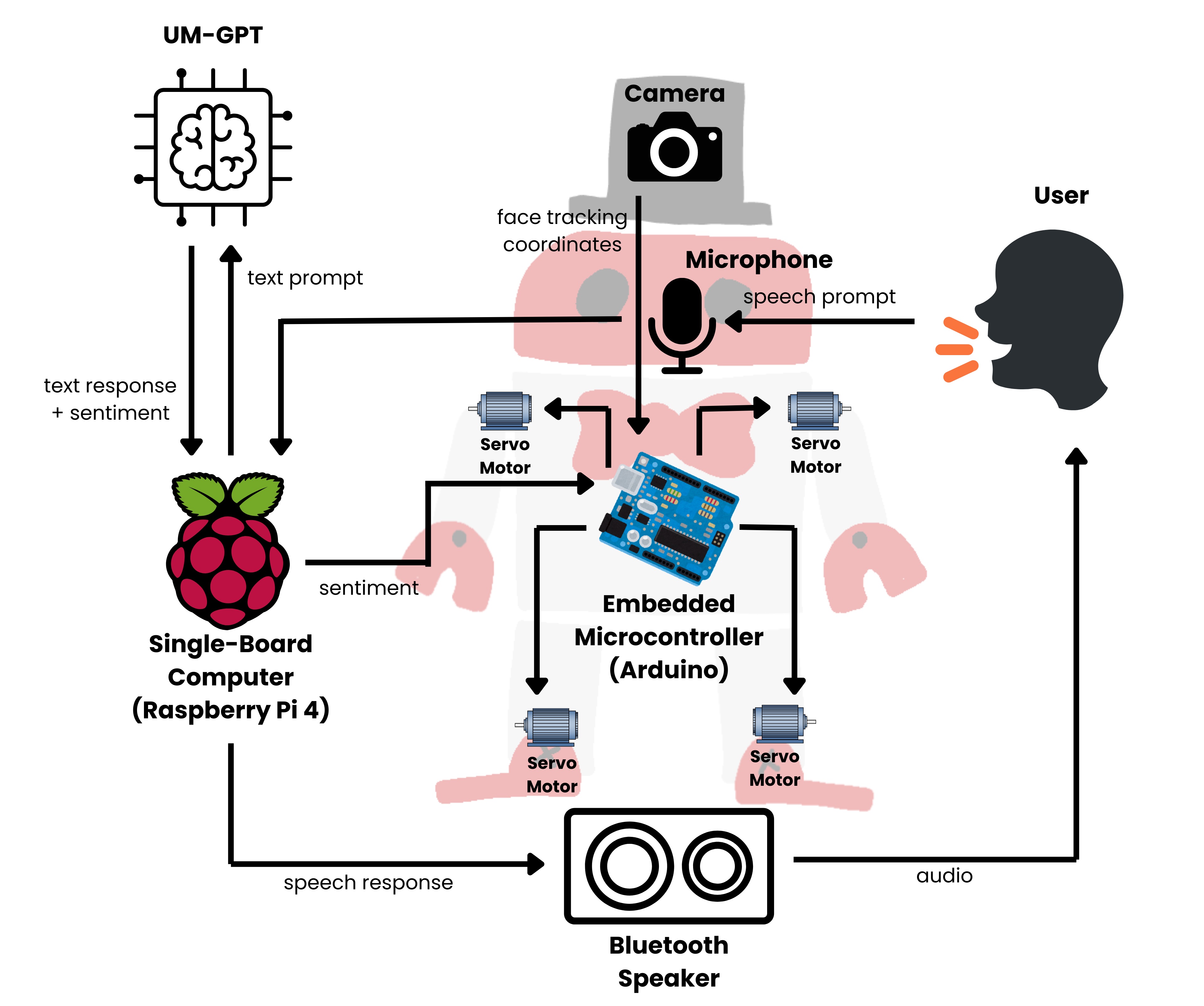
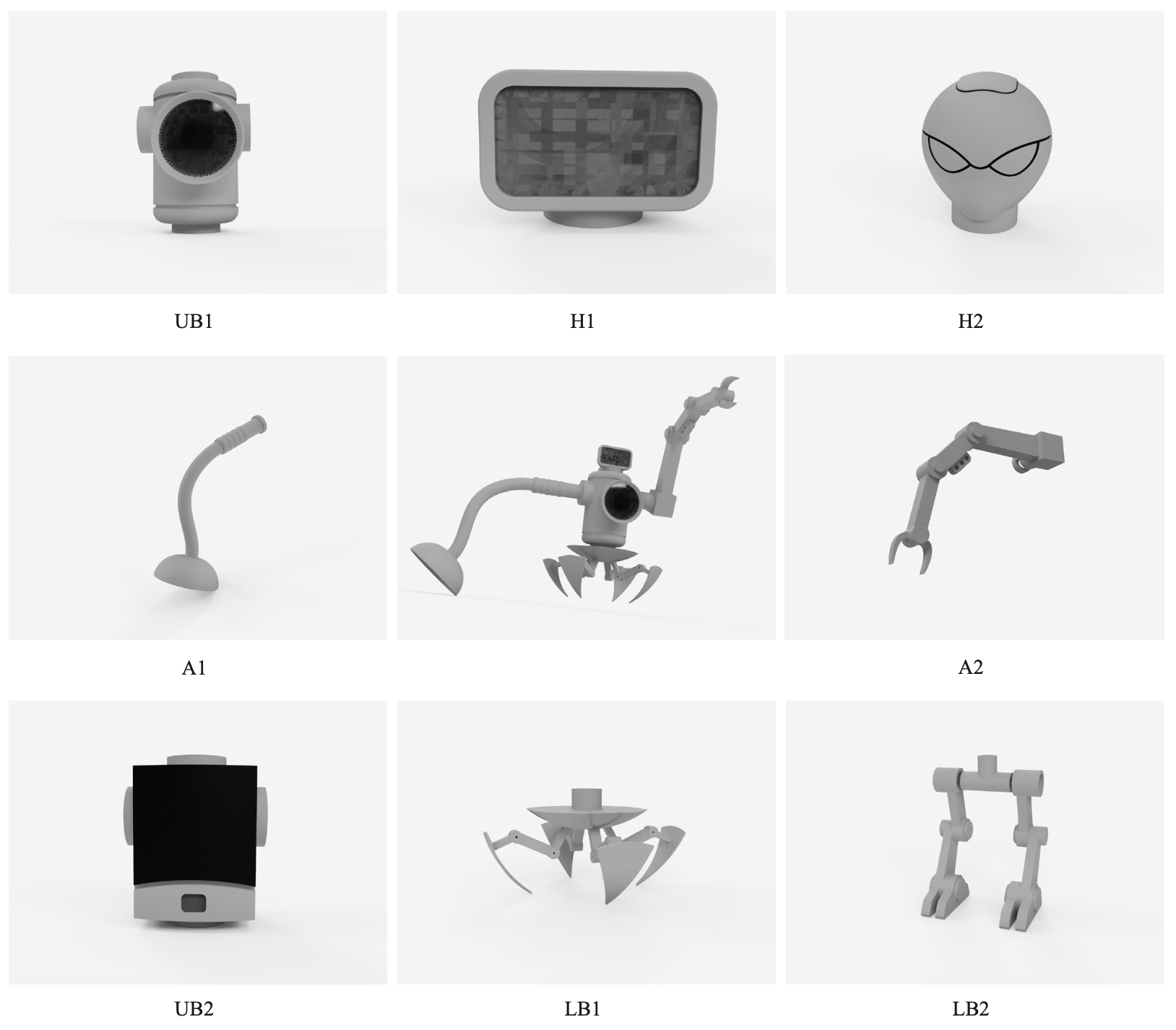
A new, affordable robot platform powered by large language models is opening doors for researchers studying how physical form impacts human-AI trust and engagement.
A new, affordable robot platform powered by large language models is opening doors for researchers studying how physical form impacts human-AI trust and engagement.
New research reveals that even when given the same data, different AI-powered analysts arrive at surprisingly diverse conclusions, mirroring the inconsistencies often seen in human research.
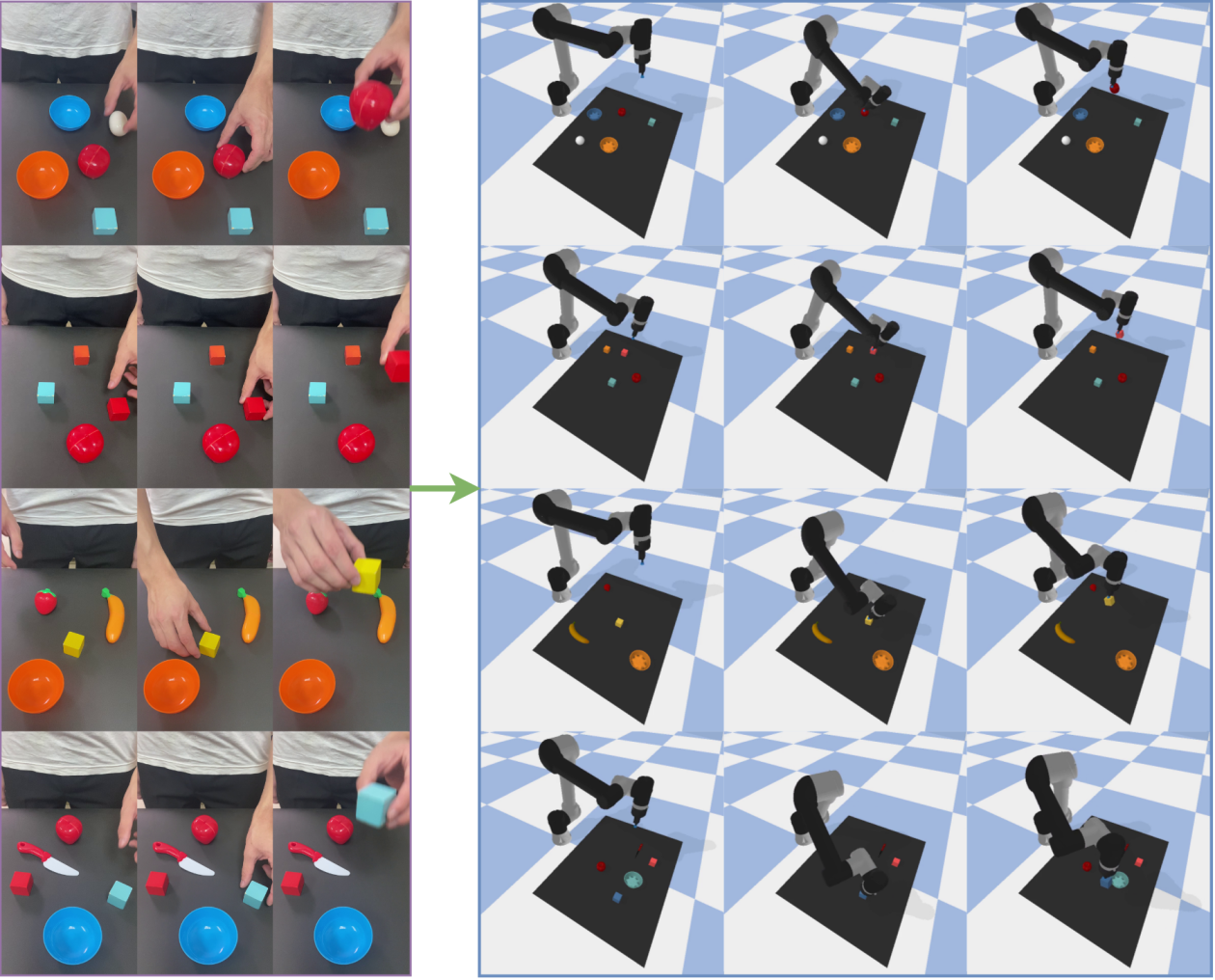
A new imitation learning approach allows robots to acquire complex manipulation skills simply by observing human demonstrations in video.
Artificial intelligence is poised to reshape how we teach and learn science, but realizing its potential requires careful consideration of ethics and equity.
A new approach to human-robot interaction prioritizes long-term relationships and adaptability over short-term tasks.
Artificial intelligence is poised to fundamentally change how we teach and learn science, demanding a thoughtful redesign of core learning materials.

A new system offers a privacy-focused look at real-world conversations with large language models, revealing how users interact with and are affected by these powerful tools.
![A novel machine learning approach constructs an approximation [latex]\sigma_n[/latex] directly within the space [latex]V_n[/latex] from data, enabling a quantifiable reconstruction error relative to the target function and circumventing traditional modeling constraints.](https://arxiv.org/html/2602.17985v1/Figures/newparadigm.jpg)
A new approach explores how algorithms can learn effectively by leveraging the underlying geometry of data, reducing the need for extensive labeled datasets.
![A robotic system achieves coordinated movement through a distributed planning strategy, wherein a designated leader [latex]r_3[/latex] calculates a global path towards a desired formation, while subordinate robots navigate to assigned partial goals [latex]p_2, ..., p_N[/latex], maintaining formation integrity via virtual spring and damper connections.](https://arxiv.org/html/2602.18260v1/x1.png)
Researchers have developed a new framework for coordinating groups of legged robots, allowing them to navigate complex environments with improved robustness and flexibility.
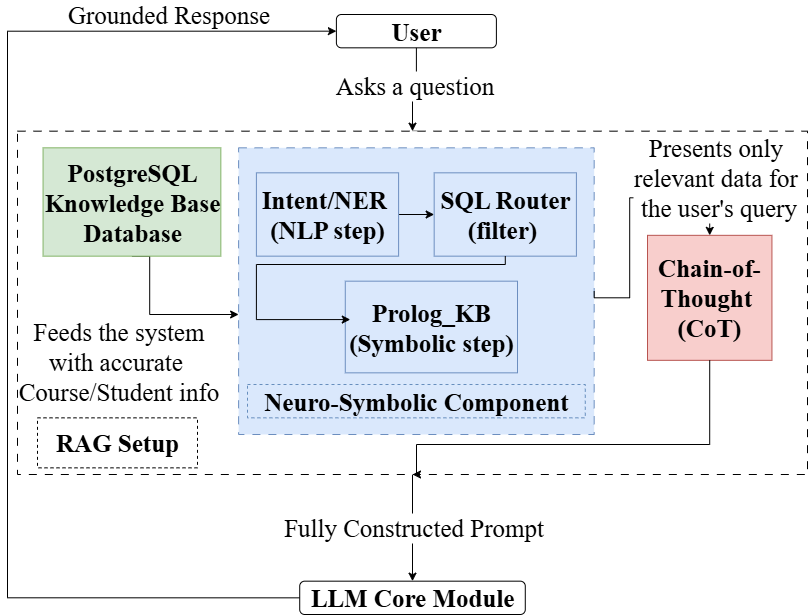
A new system combines the power of language models with structured reasoning to deliver more accurate and transparent academic advising.