Teaching Robots to Grasp the World: A New Foundation Model for Embodied Intelligence
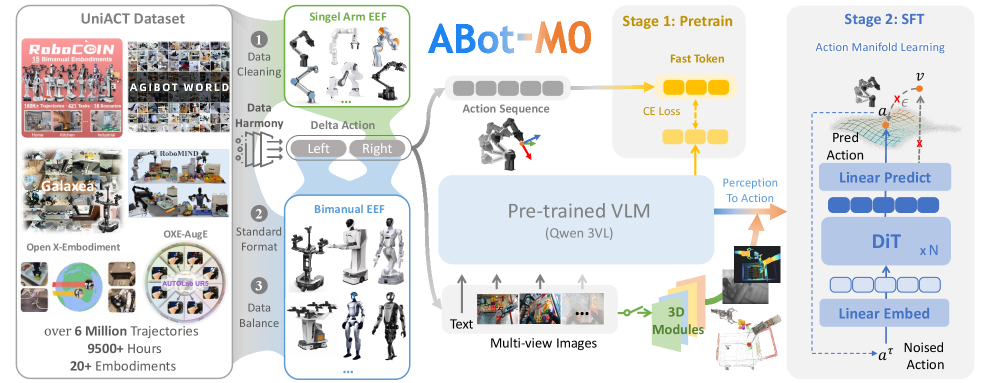
Researchers have unveiled ABot-M0, a framework that unifies diverse robotic datasets and employs a novel learning technique to enable more general and adaptable robotic manipulation skills.






![This framework addresses distributional inconsistencies across a three-stage pipeline-expanding training coverage via heuristic DAgger and spatio-temporal augmentation in [latex]P_{\text{train}}[/latex], merging complementary policies in weight space with stage-aware advantage in [latex]Q_{\text{model}}[/latex], and ensuring execution accuracy with temporal chunk-wise smoothing and closed-loop refinement in [latex]P_{\text{test}}[/latex].](https://arxiv.org/html/2602.09021v1/x1.png)