Author: Denis Avetisyan
A new capacitive sensing approach leverages the mechanics of folded paper to provide robust proprioception for delicate soft robotic systems.
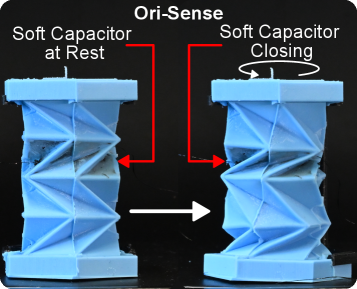
Ori-Sense utilizes an inverted Kresling pattern to translate torsional deformation into measurable capacitance changes, enabling enhanced control and feedback in soft robotics.
Achieving robust proprioception in soft robots remains challenging due to the inherent compliance of their materials. This work introduces ‘Ori-Sense: origami capacitive sensing for soft robotic applications’, a novel compliant sensor inspired by the inverted Kresling origami pattern that effectively transduces torsional deformation into measurable capacitance changes. Specifically, a monolithic silicone structure with embedded conductive electrodes demonstrates a sensitivity of [latex]S_\theta \approx 0.0067 \text{ pF/deg}[/latex] at 5 mm axial deformation, with minimal impedance and low stiffness. Could this approach pave the way for more intuitive and adaptable soft robotic systems capable of complex manipulation and environmental interaction?
Beyond Pre-Programmed Limits: The Challenge of Embodied Intelligence
Historically, robotics has been predicated on meticulously crafted models of both the robot itself and its operating environment. This approach, while enabling impressive feats of automation in structured settings like factory assembly lines, fundamentally limits a robot’s ability to function effectively in the real world. These systems struggle when confronted with the inherent unpredictability of unstructured spaces – uneven terrain, unexpected obstacles, or variations in lighting and object placement. The reliance on precise pre-programmed movements and detailed environmental maps means even minor deviations can lead to failure, demanding constant recalibration or human intervention. Consequently, a significant challenge in advancing robotics lies in moving beyond this model-dependent paradigm towards systems capable of robust and adaptable performance through sensorimotor interaction and intrinsic understanding, rather than predetermined control.
Navigating unpredictable environments presents a significant hurdle for conventional robotics, as these systems often depend on meticulously mapped spaces and pre-programmed movements. A shift is underway towards developing robots capable of operating effectively in dynamic, real-world settings – think cluttered homes, disaster zones, or even extraterrestrial landscapes. This requires a move beyond rigid control systems and precise localization, and instead focuses on sensorimotor contingencies – the constant feedback loop between sensing the environment and adjusting movements accordingly. Researchers are exploring innovative sensing modalities, including bio-inspired tactile sensors and vision systems that can interpret ambiguous data, coupled with control algorithms that prioritize adaptability and robustness over absolute precision. The ultimate goal is to create robots that don’t simply execute pre-defined paths, but explore and react to their surroundings, much like a biological organism.
The development of truly adaptable robots hinges on imbuing them with a sense of self – specifically, proprioception, the ability to perceive their own body’s position and movement in space. Unlike traditional robotics which relies on external sensors and pre-programmed motions, robots equipped with robust proprioceptive capabilities can internally model their configurations and predict the outcomes of their actions. This internal model allows for nuanced control, enabling robots to navigate complex and unpredictable environments, recover from disturbances, and even learn new skills through self-exploration. Researchers are exploring diverse approaches to achieve this, from incorporating advanced tactile sensors and force-torque sensors into robotic limbs, to developing sophisticated algorithms that fuse sensor data with dynamic models of the robot’s anatomy and physics. Ultimately, a robot that ‘understands’ its own body is poised to move beyond rigid automation and achieve a level of dexterity and resilience previously unattainable.
The development of truly soft and adaptable robots is significantly hampered by limitations in current sensor technology. Traditional sensors, often rigid and focused on discrete data points, struggle to provide the nuanced, continuous feedback necessary for navigating complex, unstructured environments. These devices frequently lack the compliance – the ability to deform and conform to surfaces – that characterizes soft robotic materials, creating a disconnect between perception and action. Moreover, integrating numerous sensors into a cohesive system, while maintaining signal fidelity and processing speed, presents a substantial engineering challenge. Without sensors capable of mimicking the sensitivity and adaptability of biological touch and proprioception, robots remain reliant on pre-programmed movements and struggle to respond effectively to unforeseen interactions or changes in their surroundings, hindering their potential for real-world application and robust performance.
Ori-Sense: Engineering Perception Through Origami-Inspired Soft Sensing
Mechanical metamaterials, artificially engineered structures possessing properties not found in nature, enable the creation of sensors with precisely tailored mechanical responses. Unlike traditional sensors reliant on inherent material characteristics, metamaterials derive their functionality from their designed geometry and arrangement. This allows for programmability of properties such as stiffness, flexibility, and deformation modes. By controlling the structural architecture at a micro or macro scale, researchers can dictate how the material responds to external stimuli, effectively designing sensors optimized for specific applications and sensitivities. This approach facilitates the creation of sensors that can be tuned to detect minute changes in force, pressure, or displacement, exceeding the capabilities of conventional sensing technologies.
Ori-Sense is a soft sensor developed to convert physical deformation into quantifiable electrical signals. The device is designed for integration into soft robotic systems requiring proprioceptive feedback. It achieves this functionality through a mechanically compliant structure, enabling the sensor to respond to external forces or movements by altering its internal geometry. This geometric change is then directly correlated to a measurable electrical parameter, facilitating the detection and quantification of deformation events. The core principle allows for the creation of sensors capable of providing detailed information regarding the position, orientation, and movement of soft robotic components.
Ori-Sense employs an Inverted Kresling Origami structure – a repeating pattern of interconnected, flat facets – to achieve amplified rotational response. This specific geometric configuration exhibits a unique property where small angular deformations result in significantly larger displacements at the structure’s vertices. These amplified displacements are then harnessed by integrating flexible capacitive sensing elements at these vertices. As the origami structure rotates, the distance between the capacitive plates changes, directly modulating the capacitance. This conversion of mechanical rotation into measurable capacitance changes forms the core sensing mechanism, enabling precise detection of angular displacement with high sensitivity.
Ori-Sense facilitates compact and highly sensitive proprioceptive sensing in soft robotic systems through its design, achieving an angular sensitivity of approximately 0.0067 pF °⁻¹. This level of sensitivity enables the accurate detection of angular deformations within the robot’s structure. The capacitive measurement, which changes by 0.0067 picofarads per degree of rotation, provides a quantifiable signal directly proportional to the degree of joint or structural bending. This high sensitivity, coupled with the compact nature of the origami-inspired structure, is crucial for applications requiring precise positional awareness and control in soft robotics.
![Electrical characterization of the soft origami capacitive sensor demonstrates consistent, repeatable responses to torsional cycles at axial displacements ranging from [latex] -{15} \text{ mm} [/latex] to [latex] 15 \text{ mm} [/latex].](https://arxiv.org/html/2602.18379v1/x5.png)
Fabrication and Validation: Bringing Ori-Sense to Life
The fabrication of the Ori-Sense sensor’s hollow origami structure relies on water-soluble core molding, specifically utilizing Polyvinyl Alcohol (BVOH) as the sacrificial core material. This process allows for the creation of complex internal geometries characteristic of the origami design. BVOH is initially 3D-printed to form the desired internal support structure, after which the sensor’s outer layers are molded or printed around it. Subsequent immersion in water dissolves the BVOH core, leaving a fully hollow and functional origami structure without the need for complex support removal procedures or post-processing. The solubility of BVOH in water is critical to this method, enabling the creation of intricate hollow features inaccessible through conventional manufacturing techniques.
Thermoplastic polyurethane (TPU) was selected as the conductive material for the Ori-Sense capacitive plates due to its inherent flexibility and capacity for reliable signal transmission. TPU’s elastic properties allow the sensor to conform to varying surface geometries without compromising electrical connectivity. The material exhibits sufficient conductivity to register capacitive changes induced by deformation, while maintaining robustness against repeated mechanical stress. This selection avoids the brittleness associated with alternative conductive materials, ensuring long-term sensor functionality and signal integrity during dynamic operation and facilitating integration into flexible or wearable applications.
Finite Element Analysis (FEA) was performed utilizing Abaqus software to validate the mechanical behavior of the Ori-Sense sensor. The Neo-Hookean material model was implemented to accurately simulate the non-linear elastic properties of the flexible materials used in the sensor’s construction, specifically the thermoplastic polyurethane (TPU). This analysis focused on predicting the sensor’s deformation under applied loads, confirming structural integrity and verifying performance characteristics prior to physical prototyping. Simulation results were compared against experimental data to ensure model accuracy and to identify potential failure points or areas requiring design modification, demonstrating the sensor’s predicted response to axial and compressive forces.
Sensor performance testing indicates a sensitivity and linearity within the operational range. Specifically, the sensor exhibits operational torque values of less than 0.01 N mm when subjected to axial offsets ranging from -15 mm to 15 mm. Under compressive force applied at a 30° angle, the sensor registered a torque of 0.03 N mm. These values were obtained through experimental data and characterize the sensor’s response to defined mechanical stimuli, demonstrating its ability to detect and measure small displacements and forces.
![The soft origami capacitive sensor is fabricated through a multi-step process involving printing a [latex]BVOH[/latex] core, integrating conductive plates, silicone molding, and subsequent core dissolution to yield a flexible structure with embedded electrodes.](https://arxiv.org/html/2602.18379v1/x3.png)
Towards Adaptive and Intelligent Robots: Beyond Automation
Soft robotics, with its promise of adaptable and safe interaction, often lacks the precise control found in rigid systems. Ori-Sense addresses this challenge by providing crucial proprioceptive data – essentially, a robot’s sense of its own body’s position and movement. This is achieved through integrated sensors that monitor actuator deformation, providing real-time feedback on joint angles, forces, and overall configuration. Crucially, this data isn’t just observed; it’s fed into a closed-loop control system. This means the robot constantly compares its intended movements with its actual performance, making instantaneous adjustments to correct errors and maintain stability. Without this feedback loop, soft robots would be prone to unpredictable behavior; Ori-Sense enables nuanced, reliable movements, allowing for delicate manipulation, precise navigation, and a far more intuitive interaction with complex environments.
The fusion of Ori-Sense technology with soft robotics significantly improves a robot’s operational capacity within unpredictable settings. By providing detailed awareness of its own body and movements, Ori-Sense empowers these robots to navigate intricate environments – from cluttered workspaces to uneven terrain – with greater precision and stability. This heightened sense of self also facilitates safer human-robot interactions; the robot can more accurately predict its own actions and adjust its behavior to avoid collisions or unintended contact. Consequently, soft robots equipped with Ori-Sense are not merely programmed to perform tasks, but possess an enhanced capacity for adaptive behavior, responding intelligently to external stimuli and ensuring a more harmonious coexistence with people in shared spaces.
The innovation of Ori-Sense isn’t limited to a robot’s internal awareness of its own body – its foundational principles readily translate to exteroception, granting robots a comprehensive understanding of their surroundings. By adapting the same sensor technology used for proprioceptive feedback, researchers are developing systems capable of ‘feeling’ external forces, textures, and proximity without relying solely on vision or traditional distance sensors. This extension allows robots to not only know where their limbs are in space, but also what they are touching and interacting with, fostering a richer, more nuanced perception of the environment. The result is a pathway toward robots that can navigate unpredictable landscapes, manipulate delicate objects with precision, and respond intelligently to dynamic external stimuli – effectively building machines that ‘sense’ the world around them with a level of detail previously unattainable.
The advent of truly adaptable robots hinges on their capacity to move beyond pre-programmed responses and embrace real-time learning. Current robotic systems often struggle when confronted with situations outside of their defined parameters, but emerging technologies are poised to change this. These advancements aren’t simply about faster processing or more sophisticated algorithms; they focus on imbuing robots with a dynamic understanding of their own state and the surrounding environment. This allows for on-the-fly adjustments, enabling them to not only react to unforeseen circumstances, but also to learn from them, refining their performance and increasing their resilience in unpredictable scenarios. The result promises a new breed of robotic systems – ones capable of independent problem-solving, collaborative interaction, and sustained operation in complex, ever-changing worlds.
![The inverted Kresling origami sensor exhibits a predictable mechanical response, demonstrating a linear relationship between torque/axial force and rotation angle, with peak values showing symmetry between tensile and compressive deformation, as validated by both experimental and FEM analysis [latex]\SIUnitSymbolDegree[/latex].](https://arxiv.org/html/2602.18379v1/x4.png)
The pursuit of effective proprioception in soft robotics, as demonstrated by Ori-Sense, mirrors a dedication to distilling complexity. This research elegantly addresses the challenge of translating torsional deformation into a quantifiable signal-a process achieved not through intricate mechanisms, but through the inherent properties of an inverted Kresling origami pattern. As Alan Turing observed, “Sometimes it is the people who no one imagines anything of who do the things that no one can imagine.” This work exemplifies that sentiment; a deceptively simple design yielding a sophisticated solution, proving that true innovation often resides in what remains after superfluous elements are removed. The core concept of converting mechanical deformation into capacitance change is beautifully minimalist.
What Lies Ahead?
The pursuit of proprioception in soft robotics has, until now, often resembled an attempt to graft the rigidity of traditional sensing onto systems fundamentally defined by compliance. Ori-Sense, by embracing the geometry itself as the transduction mechanism, offers a reprieve from this tendency. It is not flawless, of course. The inverted Kresling pattern, while elegant, still presents challenges in scaling and manufacturing – they called it a mechanical metamaterial to justify the complexity. The true test will lie in demonstrating robustness outside of carefully controlled laboratory settings.
Future work should address the limitations inherent in purely capacitive sensing – drift, temperature sensitivity, and the ever-present need for calibration. A worthwhile endeavor might be integrating Ori-Sense with other sensing modalities, not to create a cacophony of data, but to establish a hierarchy of information. Simplicity, after all, is not a lack of sophistication, but a distillation of it.
The ultimate measure of success will not be the number of axes sensed, or the resolution achieved, but the degree to which these sensors enable soft robots to interact with the world in a truly intuitive and adaptive manner. Perhaps, then, these compliant machines will finally move beyond the realm of demonstration and begin to fulfill their potential – a potential, it must be said, that has been frequently overstated.
Original article: https://arxiv.org/pdf/2602.18379.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-02-24 03:59