Author: Denis Avetisyan
New research leverages machine learning to estimate muscular fatigue during physically demanding tasks where humans and robots work side-by-side.
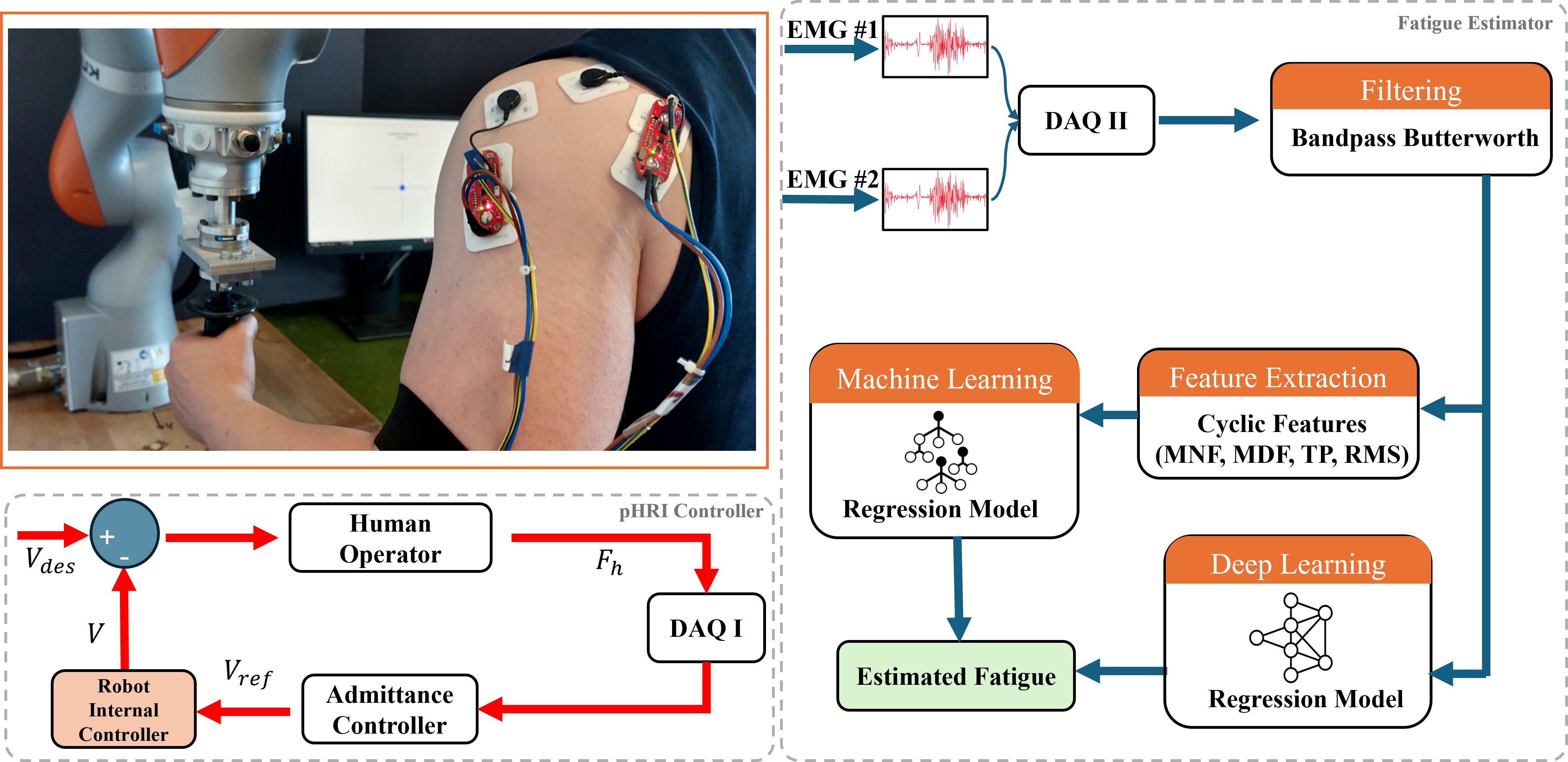
A learning-based model utilizing electromyography and force sensors accurately estimates human fatigue progression in dynamic collaborative robotic tasks.
Assessing and predicting human fatigue remains a critical challenge in physical human-robot interaction, limiting both performance and safety. This work, ‘Estimating Human Muscular Fatigue in Dynamic Collaborative Robotic Tasks with Learning-Based Models’, presents a data-driven framework utilizing surface electromyography to estimate the progression of muscular fatigue during repetitive tasks. Results demonstrate that both feature-based machine learning models and deep learning approaches can accurately predict remaining work capacity, with convolutional neural networks achieving the lowest error. Could this approach pave the way for truly fatigue-adaptive robotic control and enhanced operator protection in collaborative work environments?
The Inevitable Decline: Understanding Fatigue in Collaborative Robotics
The interplay between humans and robots in physical collaborative tasks – known as Physical Human-Robot Interaction or pHRI – is profoundly affected by the inevitable onset of muscle fatigue. Diminished muscular endurance directly translates to reduced performance, impacting the precision, speed, and overall effectiveness of shared activities. More critically, however, fatigue introduces a significant safety risk; as muscles tire, a human’s ability to react to unexpected forces or maintain stable posture degrades, potentially leading to errors, collisions, and injury. Consequently, the accurate and continuous assessment of human muscle fatigue is not merely a matter of optimizing performance, but a fundamental requirement for designing safe and reliable collaborative robotic systems. Understanding the specific ways fatigue manifests during pHRI tasks allows for the development of adaptive robotic assistance strategies – systems that can intelligently respond to a human’s diminishing capacity and proactively mitigate potential hazards.
Conventional approaches to measuring muscular fatigue, such as analyzing electromyography signals or tracking force output, frequently fall short when applied to repetitive, cyclical tasks. These methods often rely on static measurements or averages, failing to capture the subtle, time-dependent changes in muscle performance that characterize fatigue development during activities like assembly line work or rehabilitation exercises. The result is a limited understanding of when fatigue truly impacts performance, hindering the development of effective interventions or adaptive robotic assistance. Because fatigue isn’t a simple decline but a fluctuating process influenced by task frequency and duration, traditional assessments struggle to predict performance decrements and may underestimate the risk of errors or injury during prolonged, cyclical pHRI scenarios.
The capacity to reliably estimate human fatigue stands as a cornerstone for the development of truly collaborative physical human-robot interaction. As humans and robots increasingly share workspaces and tasks, a robot’s ability to discern a worker’s fatigue levels moves beyond simple performance monitoring; it becomes a vital safety mechanism. Accurate fatigue estimation allows for adaptive robotic assistance, enabling the robot to proactively adjust its support-reducing the load on a tiring worker, altering task sequencing, or even initiating a temporary halt to prevent errors and musculoskeletal injury. This isn’t merely about optimizing productivity; it’s about ensuring worker well-being by preemptively mitigating the risks associated with diminished physical capacity and cognitive function during sustained, collaborative effort. Consequently, ongoing research focuses on developing sophisticated algorithms and sensor integrations capable of discerning subtle physiological and biomechanical indicators of fatigue, ultimately fostering a safer and more effective partnership between humans and robots.
![Representative data from pHRI experiments show cyclic [latex]X[/latex]-axis movements, corresponding human force exertion, and LD/PD muscle activity-measured via surface EMG-until the onset of fatigue, with dotted lines delineating individual cycles.](https://arxiv.org/html/2602.15684v1/figs/Data_From_One_Subject.png)
Decoding the Signals: Physiological Biomarkers of Fatigue
Electromyography (EMG) is a technique used to detect and assess the electrical activity produced by skeletal muscles. This activity originates from motor unit action potentials, reflecting the depolarization of muscle fibers during contraction. As fatigue develops, changes occur in the amplitude and frequency of these signals; specifically, a reduction in the amplitude of the motor unit action potential and an increase in signal noise. Consequently, EMG serves as a primary method for objectively quantifying muscle fatigue during both static and dynamic contractions, offering data crucial for understanding neuromuscular performance and limitations in various applications, including sports science, ergonomics, and clinical diagnostics.
Electromyography (EMG) signal features provide objective quantification of muscle fatigue. Root Mean Square (RMS) amplitude reflects the overall level of muscle activation; a decrease typically indicates fatigue. Mean Power Frequency (MPF) and Median Power Frequency (MePF), derived through frequency-domain analysis, are sensitive to changes in the spectral content of the EMG signal. As muscles fatigue, the MPF and MePF generally decrease due to a shift towards lower frequency components, reflecting the recruitment of lower-threshold motor units and a decline in the firing rates of higher-threshold units. These parameters, when analyzed individually or in combination, offer quantifiable metrics for assessing muscle fatigue levels and tracking the progression of neuromuscular fatigue during sustained or repetitive tasks.
Traditional time-domain analysis of electromyography (EMG) signals, while providing basic information on muscle activation intensity, proves insufficient for accurately assessing fatigue during complex dynamic tasks. These tasks introduce variability and non-stationarity, obscuring fatigue-related changes in simple metrics like root mean square (RMS) amplitude. Consequently, advanced analysis techniques, specifically frequency-domain analysis, are necessary. Frequency-domain methods, such as examining changes in Mean Power Frequency (MPF) and Median Power Frequency (MdPF), provide insights into the spectral shift of the EMG signal, reflecting alterations in muscle fiber recruitment and conduction velocity indicative of fatigue. These spectral parameters offer a more sensitive and reliable quantification of neuromuscular fatigue compared to time-domain measures during activities involving varying loads and movement patterns.
![Analysis of muscle features-including mean normalized force [latex]MNF[/latex], median absolute deviation of force [latex]MDF[/latex], peak torque [latex]TP[/latex], and root mean square amplitude-reveals a consistent decline with increasing cycle fraction to fatigue (FCF) in both the lateral [latex]LD[/latex] and posterior [latex]PD[/latex] muscles, as demonstrated by individual and averaged linear trends.](https://arxiv.org/html/2602.15684v1/figs/Features_vs_FCF.png)
Machine Intelligence: Modeling and Predicting Fatigue Dynamically
Machine learning (ML) algorithms provide methods for developing predictive models of muscle fatigue by identifying complex, non-linear relationships within physiological data. Algorithms such as Random Forest, XGBoost, and Convolutional Neural Networks (CNNs) are particularly well-suited to this task due to their capacity to handle high-dimensional datasets and learn from multiple input features simultaneously. Random Forest utilizes ensemble learning with decision trees, XGBoost employs gradient boosting for improved accuracy, and CNNs are effective at automatically extracting relevant features from time-series data, like electromyography (EMG) signals. The application of these ML techniques allows for the creation of models that can estimate muscle fatigue levels based on physiological inputs, potentially offering more accurate and robust predictions compared to traditional, physics-based approaches.
The integration of multiple physiological features enhances the predictive capabilities of machine learning models for fatigue estimation. Specifically, features like the Ratio of Mean Nerve Firing to Arterial Velocity [latex] (MNF/ARV) [/latex] provide insight into neuromuscular activation and blood flow dynamics, while the Integral of Normalized Electromyography (iEMG) quantifies muscle activation levels over time. Combining these features – representing both neural drive and muscular response – allows the models to capture complex interactions indicative of fatigue, improving both the accuracy and robustness of predictions compared to models relying on single features or limited datasets. This multi-feature approach effectively addresses the non-linear and multi-faceted nature of muscular fatigue.
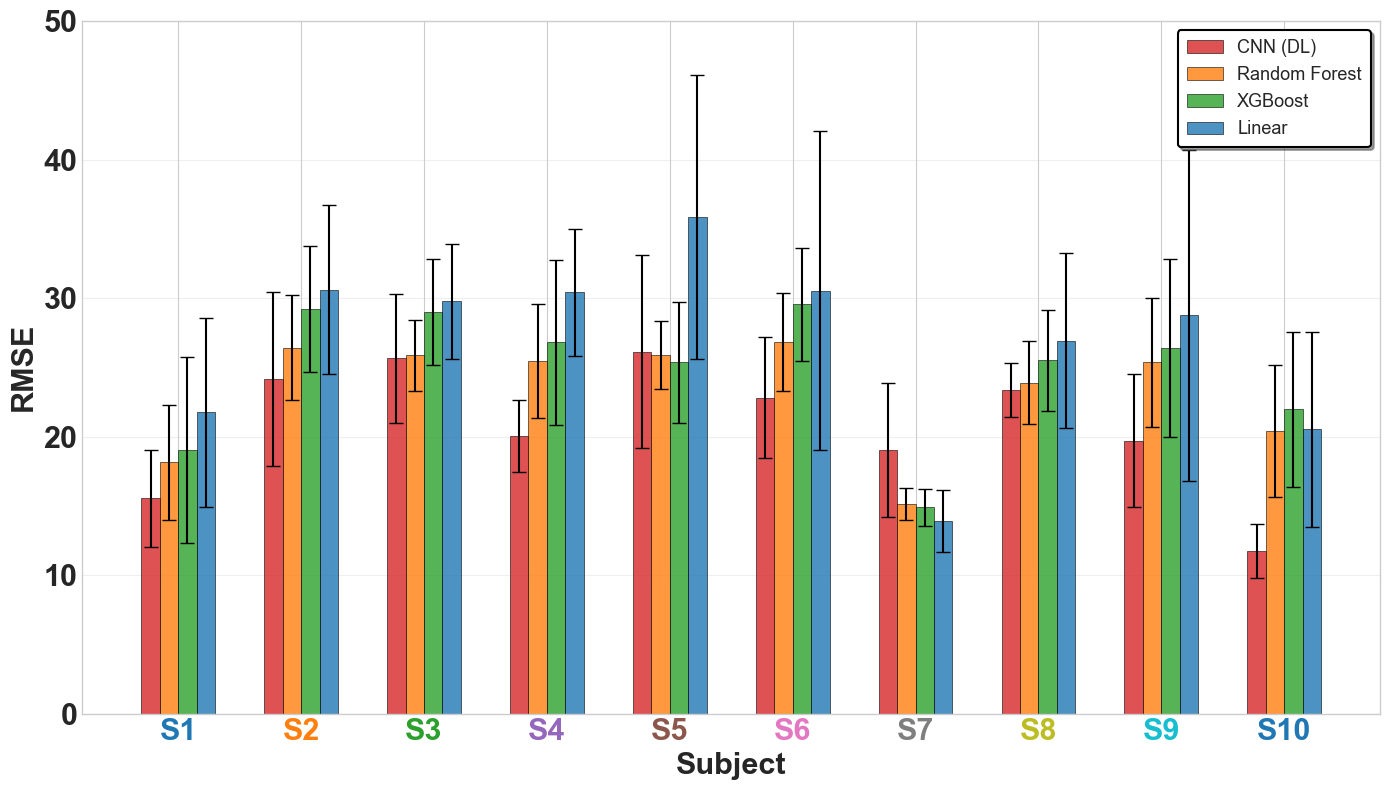
A subject-specific machine learning approach was implemented to estimate human muscular fatigue during dynamic Physical Human-Robot Interaction (pHRI) tasks. Evaluation using a Convolutional Neural Network (CNN) model yielded an average Root Mean Squared Error (RMSE) of 20.8%. This performance represents a statistically significant improvement over alternative algorithms tested on the same dataset: Random Forest (RMSE of 23.3%), XGBoost (RMSE of 24.8%), and Linear Regression (RMSE of 26.9%). The results indicate that a CNN, when trained on individualized physiological data, provides the most accurate estimation of muscular fatigue during dynamic pHRI scenarios within the parameters of this study.
![Subjective ratings of fatigue [latex] (SRF) [/latex] negatively correlate with the fraction of cycles to fatigue [latex] (FCF) [/latex], as demonstrated by individual linear regressions for each participant and a collective trend across the group.](https://arxiv.org/html/2602.15684v1/figs/SRF_FCF_2.jpg)
Towards Proactive Collaboration: Integrating Prediction into Real-World Systems
The development of truly responsive physical human-robot interaction (pHRI) hinges on the ability to realistically simulate and predict human state within a dynamic environment. Researchers are achieving this by fusing machine learning-driven fatigue estimation with the complementary strengths of Digital Twins and virtual environments. This integration allows for the creation of scenarios where a robot can ‘perceive’ a human’s evolving physical condition – specifically, levels of fatigue – in real-time. The Digital Twin serves as a personalized biomechanical model, constantly updated by sensor data and ML algorithms, while the virtual environment provides a safe and controllable space for testing and refining adaptive assistance strategies. This synergistic approach moves beyond pre-programmed responses, enabling robotic systems to anticipate human needs and adjust their behavior to optimize performance and mitigate the risk of injury in real-world applications.
The convergence of admittance control and Digital Twin technology offers a pathway to remarkably safe and intuitive physical human-robot interaction (pHRI). Admittance control, implemented within a virtual environment, allows the robotic system to respond flexibly to human force and motion, effectively mimicking a compliant partner and reducing the risk of collisions or abrupt movements. Simultaneously, the Digital Twin continuously monitors the human operator’s physiological state – specifically, fatigue levels – providing real-time feedback to the control system. This data-driven insight enables the robot to dynamically adjust its assistance, offering proactive support during moments of increased physical strain and preventing potential overexertion or injury. The result is a synergistic interaction where the robot anticipates and adapts to the human’s needs, fostering a comfortable and efficient collaborative experience.
The potential for robotic systems to dynamically adjust support based on real-time human state represents a significant advancement in physical human-robot interaction. By continuously monitoring indicators of user fatigue – such as muscle load and movement efficiency – and integrating this data with a predictive model, robots can proactively modify their assistance. This doesn’t simply mean applying more or less force; rather, the system can subtly alter movement trajectories, pre-position components, or even suggest modified work practices to distribute the physical burden. Consequently, robotic partners can mitigate the risk of overexertion and injury by providing targeted support before fatigue becomes debilitating, fostering a more sustainable and ergonomic collaboration – ultimately enhancing both human performance and well-being in physically demanding tasks.
Expanding the Horizon: Future Directions in Fatigue Prediction
Refining predictive models for human fatigue necessitates moving beyond traditional approaches and embracing sophisticated techniques like Gaussian Process Regression and First-Order Ordinary Differential Equations. Gaussian Process Regression offers a powerful non-parametric framework capable of quantifying uncertainty and adapting to individual physiological responses, crucial for personalized fatigue prediction. Simultaneously, leveraging dynamic simulation software such as OpenSim, alongside First-Order ODEs, allows researchers to model the complex interplay between muscle dynamics, neural drive, and metabolic processes that contribute to fatigue onset. This combined approach not only improves the accuracy of predictions but also enhances generalizability across diverse tasks and populations, ultimately paving the way for robotic systems capable of proactively adapting to human limitations and ensuring sustained, safe collaboration.
Transitioning fatigue prediction from controlled laboratory settings to real-world applications necessitates a broadened scope of investigation. Current models often focus on simplified, repetitive movements; however, human tasks are rarely so uniform. Future research must incorporate the complexities of dynamic activities – those involving unpredictable changes in speed, direction, and force – to accurately reflect the physiological demands placed on individuals. Equally important is acknowledging the substantial variability in human physiology; factors such as age, sex, fitness level, and even daily fluctuations in alertness all influence fatigue onset and progression. Successfully integrating these individual differences into predictive algorithms will be paramount to developing truly personalized and effective fatigue management systems, ultimately fostering safer and more efficient human-robot collaboration.
The research culminates in a validated approach to fatigue prediction, demonstrated by a strong correlation – an R-squared value of 0.98 – between estimated fatigue levels and individual subjective reports. This high degree of accuracy suggests the potential for creating robotic systems capable of genuine collaboration with humans. The ultimate goal extends beyond mere performance enhancement; it envisions robots that seamlessly adapt to human physiological states, proactively mitigating risks associated with fatigue and prioritizing user safety and well-being. This adaptive capacity promises to unlock new levels of human-robot interaction, fostering truly collaborative environments where both partners can operate optimally and securely.
The pursuit of accurately modeling human muscular fatigue, as demonstrated in this work utilizing electromyography and regression models, echoes a fundamental principle of system design. Just as a complex system’s behavior is dictated by its underlying structure, so too is human fatigue a predictable outcome of muscular stress and recovery cycles. G. H. Hardy observed, “A mathematician, like a painter or a poet, is a maker of patterns.” This resonates with the approach taken here – identifying and modeling the patterns within EMG signals to forecast fatigue progression. The elegance of this method lies in its ability to distill complex physiological data into a quantifiable and predictive framework. Good architecture is invisible until it breaks, and only then is the true cost of decisions visible.
Where the Strain Lies
The presented work, while demonstrating a capacity to model muscular fatigue, merely scratches the surface of a profoundly complex interplay. Estimating fatigue from electromyography signals and force data is, after all, a reductionist exercise. It assumes a relatively direct mapping between electrical activity, exerted force, and the subjective experience of exhaustion. Yet, the body is not a simple machine; it is a cascade of feedback loops, influenced by cognitive load, prior experience, and even anticipation of discomfort. Modifying one aspect – improving the regression model, for instance – will invariably trigger a domino effect, shifting the burden of error elsewhere within the system.
Future work must address this holistic nature. Integrating physiological signals beyond EMG – heart rate variability, cortisol levels, even subtle changes in gait – could offer a more nuanced picture. Furthermore, a critical, often overlooked point is the individual variability in fatigue manifestation. A truly robust model must account for these personal baselines and adaptive capacities, moving beyond generalized estimations.
The ultimate challenge lies not in predicting fatigue, but in understanding it as a symptom of a larger system striving for homeostasis. Focusing solely on the muscular level, while useful, is akin to diagnosing engine trouble by only monitoring the exhaust. A complete understanding demands a view of the entire architecture, acknowledging that even the most elegant model is, ultimately, a simplification of an infinitely intricate reality.
Original article: https://arxiv.org/pdf/2602.15684.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-02-19 02:48