Author: Denis Avetisyan
New research explores how robots can move beyond functional aid to create truly inclusive and personalized dining experiences for people with disabilities.
This review examines the application of participatory design and generative AI in developing robot-assisted dining systems that deliver a ‘white glove’ level of service and promote social interaction.
While robot-assisted dining increasingly aims to restore independence for individuals with disabilities, current systems remain largely untested beyond controlled environments. This research, ‘Robot-Assisted Social Dining as a White Glove Service’, investigates the design of assistive robots for dynamic, real-world social dining experiences, employing participatory design and AI-driven storyboarding with potential users. Our key insight reveals that successful implementation necessitates a ‘white glove’ service paradigm-one prioritizing multimodal interaction, contextual sensitivity, expanded functionality beyond feeding, and accommodation of existing social relationships. How can we best translate these principles into robotic systems that truly enhance, rather than disrupt, the experience of shared meals?
The Subtle Dance of Connection: Redefining Social Participation
For many individuals with disabilities, seemingly simple social rituals – such as sharing a meal with family or friends – present significant, often invisible, obstacles to full participation. These barriers extend beyond physical access, encompassing challenges in navigating complex social cues, managing sensory input, and maintaining reciprocal interactions. Consequently, individuals may experience feelings of isolation, dependence, or exclusion, even within familiar settings. The difficulty isn’t necessarily the act of eating, but rather the layered social dynamics – conversation flow, shared responsibilities, and unspoken expectations – that often accompany these experiences. This highlights a crucial need for innovative solutions that address not just physical limitations, but the broader spectrum of social inclusion and quality of life.
Current assistive technologies often stumble when navigating the subtleties of human interaction, creating a disconnect between intended support and genuine social inclusion. While devices may successfully address functional limitations – for example, providing a modified utensil for someone with limited motor skills – they frequently fail to recognize the unwritten rules and shared understandings that govern social situations. This lack of ‘social intelligence’ means these technologies can inadvertently highlight disability rather than seamlessly integrating support; a robotic arm offering food, while helpful, doesn’t inherently understand conversational cues, shared enjoyment, or the delicate balance of offering assistance without undermining a person’s dignity. Consequently, individuals may experience awkwardness or feel further isolated, as existing tools struggle to bridge the gap between practical aid and meaningful participation in everyday life.
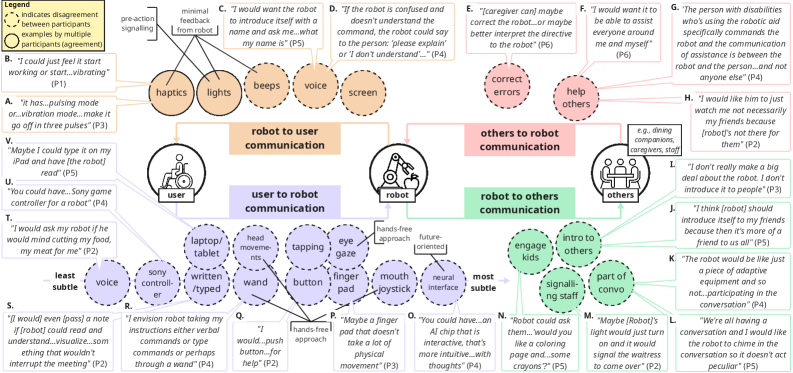
Social robotics presents a compelling avenue for enhancing inclusion by moving beyond simple assistance and towards genuine social interaction. Researchers are developing robots capable of navigating the complexities of human gatherings – shared meals, group activities, even casual conversation – and participating as collaborative partners. These aren’t machines designed to perform tasks for individuals, but rather to join them in activities, offering subtle support and companionship. This approach focuses on contextual awareness, enabling robots to understand social cues, adapt to changing dynamics, and respond in ways that promote natural engagement. By facilitating participation rather than simply providing a functional aid, social robotics aims to dismantle barriers to inclusion and foster a sense of belonging for all.
The future of assistive technology hinges on a transition from simply doing tasks for individuals to understanding and responding to the social nuances of everyday life. Research indicates a demand for support that anticipates needs and provides a seamless, dignified experience – akin to a ‘white glove service’. This means robots designed for collaborative activities, such as shared meals, must move beyond basic functionality and demonstrate contextual awareness; they need to interpret non-verbal cues, adapt to changing dynamics, and offer assistance that feels natural and respectful. This approach prioritizes fostering genuine social inclusion by empowering individuals, rather than simply performing actions on their behalf, ultimately creating a more positive and engaging experience beyond purely functional aid.
Co-Creation as a Cornerstone: Designing with, Not for
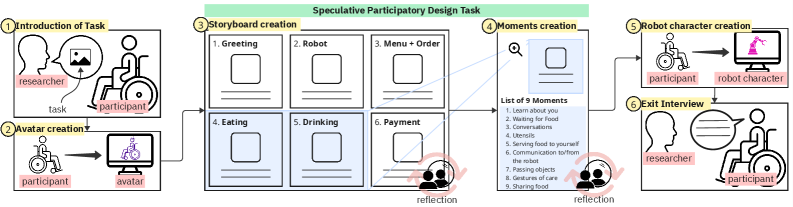
Participatory Design methodology was central to the development of the robot-assisted social dining system, prioritizing direct involvement of individuals with disabilities throughout the entire design process. This involved co-design workshops and iterative prototyping sessions where users actively contributed to defining system requirements, evaluating design concepts, and providing feedback on usability. Participants were not simply consulted regarding pre-defined designs; rather, they functioned as core design partners, shaping the system’s functionality and interaction modalities. This approach ensured the resulting technology directly addressed the specific challenges and preferences of the target user group, moving beyond assumptions about accessibility and usability to create a genuinely user-centered solution.
Direct involvement of individuals with disabilities throughout the design process was critical to ensuring the developed robot-assisted dining system aligned with user needs and preferences. This collaborative methodology moved beyond assumptions about accessibility and usability by incorporating continuous feedback on prototypes and design concepts. Specifically, user input guided decisions related to physical robot dimensions, interaction modalities, and assistance strategies, directly influencing system functionality. Consequently, the resulting technology demonstrated increased potential for successful integration into daily life, as evidenced by improved user acceptance metrics during testing and a reduction in reported usability issues compared to traditionally developed assistive technologies.
Generative AI (GenAI) and the Speak2Scene tool played a critical role in the co-design process by enabling the rapid visualization of design concepts articulated by participants with disabilities. Speak2Scene, specifically, translated verbal descriptions of desired robotic features and dining setups into visual representations in near real-time. This allowed participants to immediately assess and refine proposed designs, fostering iterative prototyping during the sessions. The use of GenAI reduced the time required to create and evaluate multiple design options, moving beyond traditional sketching or mockups and facilitating a more dynamic and responsive co-design experience. This capability was particularly valuable given the need to explore a wide range of potential assistive features and configurations.
The development process prioritized iterative incorporation of user feedback throughout all phases, from initial concept generation to final prototype refinement. This methodology moved the design away from theoretical solutions and towards a system demonstrably addressing identified user needs. Specifically, feedback directly informed the implementation of anticipatory assistance features, aligning the system’s functionality with previously established design implications derived from our user study – including requirements for adaptable support levels, personalized interaction protocols, and proactive error mitigation strategies. This constant validation ensured the resulting robot-assisted dining system was grounded in documented real-world requirements and usability criteria.
A System in Practice: Orchestrating Assistance with Precision
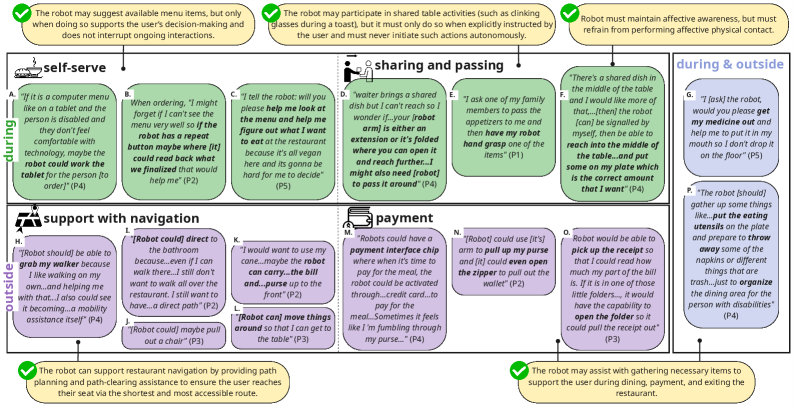
The robot-assisted dining system employs a Kinova Robotic Arm to directly support mealtime tasks. This 6-DoF (Degrees of Freedom) robotic arm is capable of performing precise manipulations, including cutting food items into manageable portions, retrieving dishes and utensils from the shared table, and serving food to individual diners. The Kinova platform was selected for its payload capacity, repeatability, and existing software integration for robotic manipulation, allowing for reliable and consistent assistance throughout the meal. The arm’s reach extends approximately 70cm, covering a typical shared dining space, and it is equipped with a food-grade end-effector designed for safe and hygienic interaction with food and tableware.
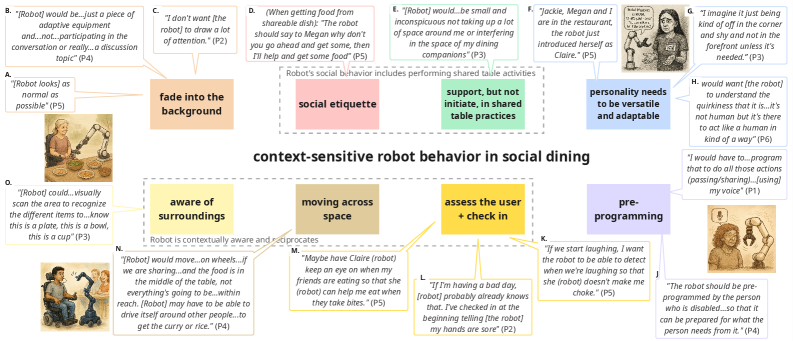
The robot-assisted dining system prioritizes social integration by adhering to established shared table practices. This is achieved through careful consideration of proxemics – the robot maintains a respectful distance from diners – and timing of assistance, ensuring actions do not interrupt conversation or the natural flow of the meal. The robot’s movements are deliberately paced and smooth to avoid startling users, and its operational range is constrained to minimize intrusion into personal space. Furthermore, the system is designed to respond to, rather than initiate, interactions; assistance is offered only when a diner signals a need, preserving the agency of all participants and fostering a more comfortable and natural dining experience.
The robotic system employs contextual awareness through a combination of computer vision and sensor data to dynamically adjust its assistance during a meal. Specifically, the robot identifies distinct stages of mealtime progression – such as course changes, plate clearing, and drink refills – and preemptively offers relevant support. This is achieved by analyzing visual cues regarding plate status and user actions, combined with data from force sensors on the robotic arm to detect interactions with food and tableware. The system does not operate on a fixed schedule but rather responds in real-time to the unfolding meal, ensuring assistance is provided only when needed and aligned with the natural flow of the dining experience.
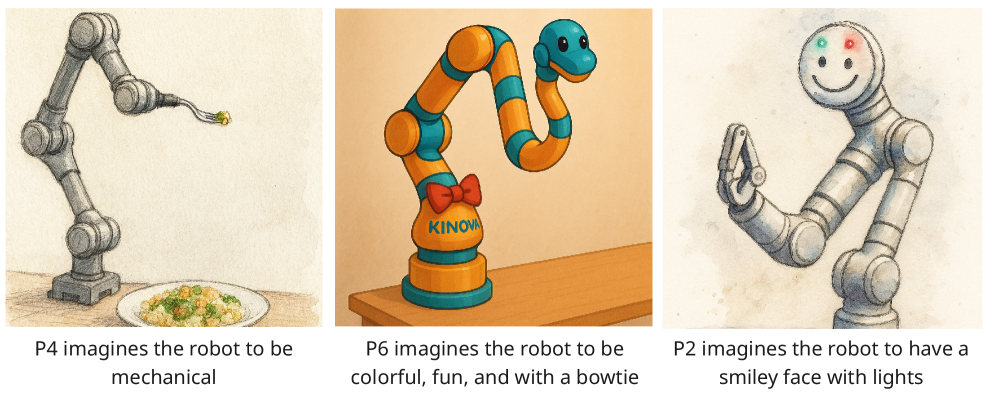
Robot Personalization within the dining assistance system extends functionality beyond task completion to address user comfort and preference. Customization options include adjustable robot arm movement speed, selectable pre-programmed greeting sequences, and visual modifications to the robot’s exterior-such as changeable “sleeves” or decorative elements. Users can define preferred assistance levels for specific tasks-for example, requesting full food preparation or only requiring assistance with difficult-to-manage items. This level of control allows for the creation of a tailored dining experience, moving beyond purely functional aid to a more refined, personalized service akin to ‘white glove’ hospitality.
Empowering Independence: Adapting Support to Foster Agency
The core of this assistive technology lies in its ability to provide dynamically adjusted support during mealtimes. Rather than offering a fixed level of assistance, the system continuously assesses the user’s individual capabilities and the specific challenges presented by each stage of the meal. This is achieved through a combination of sensor data – monitoring movements, detecting subtle changes in force, and recognizing potential difficulties – and sophisticated algorithms that interpret this information in real-time. Consequently, the robotic assistance shifts fluidly, offering more support when needed – such as stabilizing a hand during cutting or guiding a utensil towards the mouth – and gracefully receding when the user demonstrates increased confidence and control. This responsiveness isn’t merely about preventing errors; it’s about fostering a sense of agency and promoting the user’s active participation in a traditionally challenging activity.
A truly inclusive dining experience hinges on the ability of all individuals to participate with dignity and self-assurance, and recent advancements in robotic assistance are actively fostering this potential. By dynamically adjusting the level of support provided, these systems move beyond simple task completion to enable a more natural and confident engagement with mealtimes for individuals with disabilities. This isn’t merely about facilitating the physical act of eating; it’s about restoring agency and reducing the social barriers that can often accompany needing assistance. The technology allows individuals to focus on the enjoyment of the meal and the company of others, rather than on managing limitations or relying heavily on caregiver intervention, thereby promoting a greater sense of independence and social inclusion.
The capacity for robotic assistance to bolster self-reliance holds considerable promise for enhancing an individual’s overall well-being. By diminishing the need for constant caregiver intervention during everyday tasks, such as dining, this technology allows users greater agency and control over their own lives. This newfound independence isn’t merely about performing actions autonomously; it fosters a sense of dignity, accomplishment, and social inclusion, contributing to improved mental and emotional health. The reduction in caregiver burden also allows for more focused attention on other vital aspects of care and personal time, creating a more sustainable and fulfilling dynamic for both the individual and their support network. Ultimately, this advancement isn’t simply about automating tasks, but about unlocking potential and enriching the human experience.
Ongoing development of this adaptive support system prioritizes broadening its functionality beyond mealtime assistance and extending its reach into diverse social environments. Researchers are concentrating on five core design principles to maximize user experience: anticipatory assistance, where the system proactively offers help before it’s requested; discretion, ensuring support is provided subtly and without drawing unwanted attention; meticulous attention to detail in understanding individual needs; robust personalization to tailor responses to each user’s abilities and preferences; and seamless problem resolution, allowing the system to gracefully handle unexpected situations or errors. These improvements aim to create a truly versatile and empowering technology, fostering greater independence and social inclusion for individuals with disabilities in a variety of settings.
The pursuit of robot-assisted dining, as detailed in this research, reveals a fundamental truth about all complex systems. Like any meticulously crafted creation, these robotic companions are not immune to the relentless march of time and the accumulation of imperfections. Donald Knuth observes, “Premature optimization is the root of all evil.” This resonates deeply with the challenge of designing assistive technology; a system overly focused on immediate functionality, without considering long-term adaptability and graceful degradation, will ultimately fail to deliver a truly ‘white glove service’. The work underscores that anticipating user needs isn’t simply about solving present problems, but proactively addressing potential future complications within the dynamic context of social interaction.
What’s Next?
The pursuit of ‘white glove’ service via robotic assistance, as demonstrated by this work, reveals less a solution and more a carefully illuminated set of forthcoming failures. Each anticipated need met by a robot is, inevitably, a future need left unmet, a discrepancy between expectation and execution. The system does not solve the problem of assisted dining; it merely shifts the locus of its inherent imperfections. Time, as the medium of this unfolding, will reveal the brittleness of current design assumptions.
Future iterations must acknowledge that graceful aging is not about preventing errors, but about building systems capable of absorbing them. The focus should move beyond participatory design – a snapshot of current user needs – and toward anticipatory resilience. This demands generative AI not as a tool for prediction, but as a mechanism for improvisation, allowing robots to navigate the unpredictable contours of social interaction.
The ultimate metric will not be efficiency or task completion, but the quality of the system’s decay. A truly mature robotic dining assistant will not be flawless; it will be interestingly flawed, its errors revealing insights into the complexities of human need and the limitations of even the most ambitious engineered solutions. The study of these inevitable failures, then, is the most promising path forward.
Original article: https://arxiv.org/pdf/2602.15767.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-02-18 09:45