Author: Denis Avetisyan
Researchers introduce DORA, a dataflow-oriented robotic middleware designed to overcome the latency limitations of traditional systems and unlock new possibilities for edge-cloud collaboration.
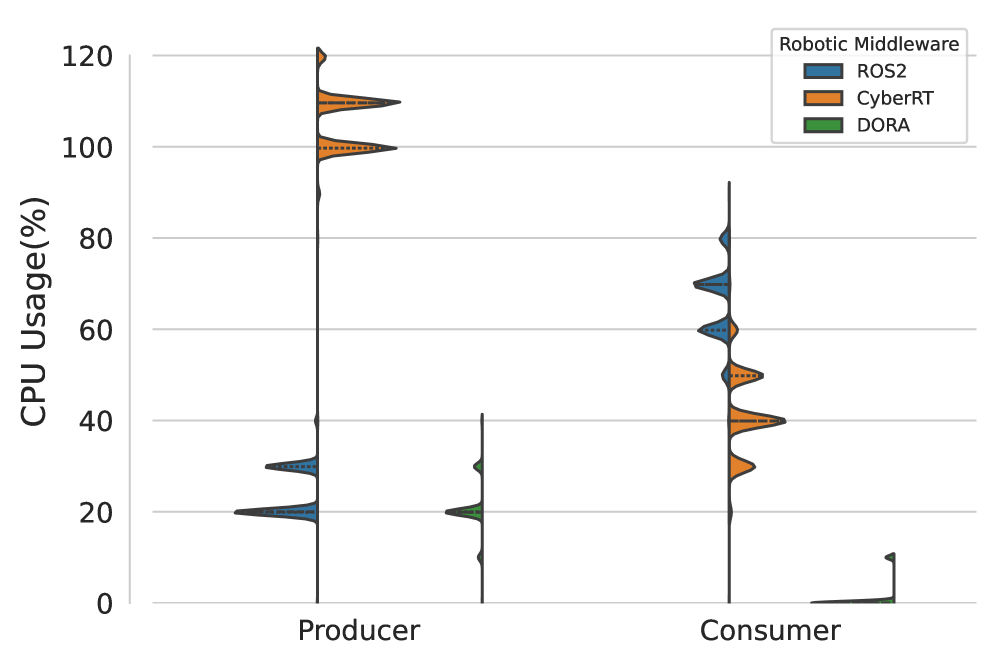
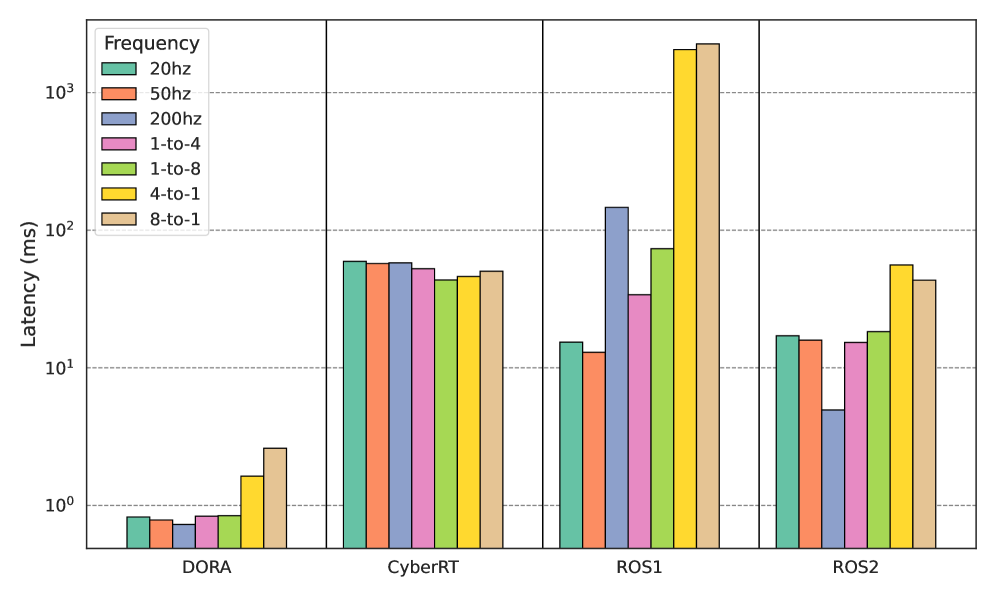
DORA utilizes optimized shared memory communication within a dataflow architecture to significantly reduce latency compared to ROS2 and CyberRT.
While robotic systems increasingly rely on middleware for coordination, existing solutions often struggle with the communication overhead inherent in data-intensive applications. To address this limitation, we introduce DORA: Dataflow Oriented Robotic Architecture, a novel framework leveraging explicit data dependency specification and optimized shared memory communication. This approach achieves substantial reductions in latency and CPU overhead compared to state-of-the-art middleware like ROS2 and CyberRT, paving the way for more responsive and efficient robotic deployments. Could DORA unlock new capabilities in real-time control and edge-cloud collaboration for complex robotic systems?
Unveiling the Bottleneck: The Limits of Centralized Control
Conventional robotic middleware, such as the widely adopted Robot Operating System 1 (ROS1), frequently encounters communication limitations stemming from its centralized architecture. This design necessitates that all data transmission pass through a single master node, creating a potential bottleneck as the robot’s complexity and the volume of data increase. While functional for simpler systems, this centralized approach struggles to handle the high-bandwidth, low-latency demands of sophisticated robots performing intricate tasks. Consequently, processing and response times can be significantly delayed, impacting real-time performance and limiting the scalability of robotic applications. The single point of failure also introduces vulnerability; disruption to the master node can halt communication across the entire system, hindering reliable operation.
A centralized architecture in robotic middleware presents inherent limitations when scaling to complex systems. The reliance on a single node for data distribution creates a bottleneck, as all information must pass through this central point, increasing data transmission latency. This delay is particularly detrimental to real-time applications-such as autonomous navigation or coordinated manipulation-where timely responses are critical. As the number of robotic components and the volume of data increase, this centralized approach struggles to maintain responsiveness, hindering the overall performance and capabilities of the robotic system. Consequently, achieving true scalability and seamless real-time operation necessitates a move away from these traditional, centralized designs.
The execution of increasingly intricate robotic tasks-from collaborative assembly to autonomous navigation in dynamic environments-relies fundamentally on seamless and rapid data exchange. Traditional robotic systems, however, often struggle with communication limitations as complexity grows, creating a critical performance bottleneck. This necessitates a move away from centralized middleware architectures toward more distributed and efficient communication paradigms. Innovations in middleware design prioritize minimizing latency and maximizing bandwidth, enabling robots to process sensory information and coordinate actions in real-time. Such advancements aren’t merely incremental improvements; they represent a foundational shift toward enabling genuinely intelligent and responsive robotic systems capable of tackling the challenges of real-world applications.
DORA: Rewriting the Rules with Dataflow
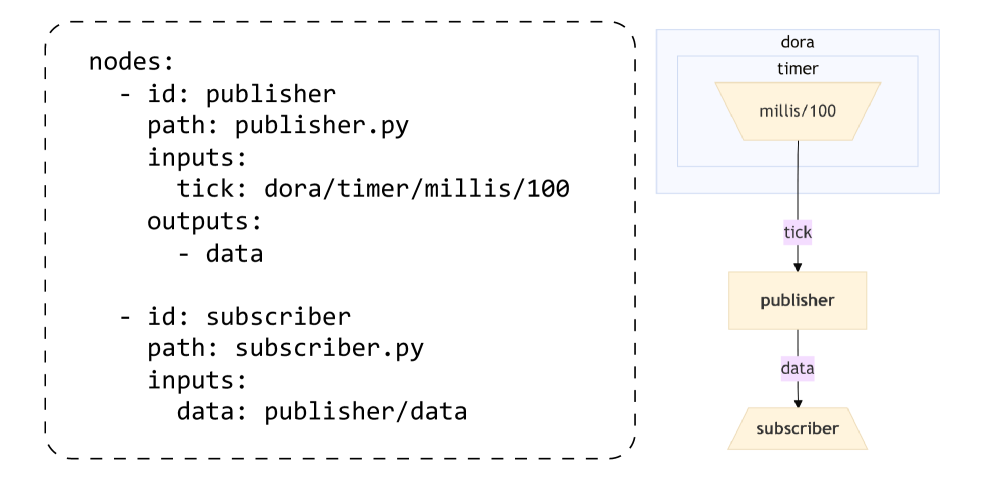
DORA employs a dataflow architecture wherein robotic applications are modeled as directed graphs. These graphs consist of nodes representing individual processing units – such as perception modules, planning algorithms, or control loops – and edges defining the data dependencies between them. Data flows along these edges, triggering node execution when all required inputs are available. This nodal structure allows for a modular and scalable system design, facilitating the composition of complex robotic behaviors from reusable components. The graph representation also enables static analysis and optimization of the dataflow, leading to predictable performance and efficient resource utilization.
The dataflow architecture implemented in DORA enables parallel execution of robotic application components by representing them as nodes within a graph. This parallelism is achieved because nodes can operate concurrently on available data as it flows through the graph, rather than sequentially as in traditional architectures. Optimized data flow, facilitated by this graph structure, minimizes data transfer bottlenecks and reduces latency. By exploiting inherent parallelism and streamlining data pathways, the system achieves improved overall performance in robotic applications, particularly in scenarios requiring real-time responsiveness and high throughput.
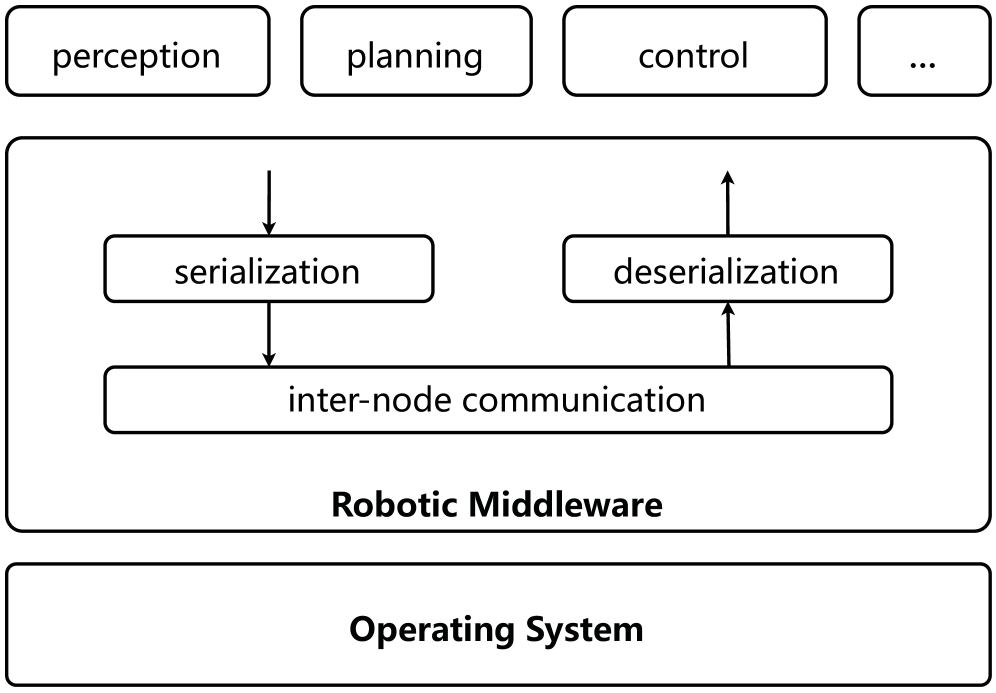
DORA’s communication strategy utilizes shared memory to minimize data transfer overhead. Traditional robotic systems often rely on serialization and deserialization to prepare data for transmission between processing nodes, a process that consumes significant CPU cycles. By enabling direct access to a shared memory region, DORA bypasses these steps, allowing nodes to read and write data directly without conversion. This approach substantially reduces latency and achieves near-zero CPU overhead for data (de)serialization, resulting in a more efficient and responsive system. The elimination of serialization/deserialization bottlenecks is critical for real-time applications and high-throughput data processing.
Resource Alchemy: Optimizing for Efficiency
DORA utilizes on-demand memory allocation to optimize resource usage by dynamically provisioning memory resources only as required during dataflow execution. This approach contrasts with static allocation methods and minimizes the overall memory footprint of the system. By avoiding pre-allocation of unused memory, DORA maximizes efficiency, particularly in scenarios with variable workload demands or large datasets. The system releases allocated memory immediately after sub-dataflow completion, further contributing to efficient resource utilization and preventing memory leaks. This dynamic allocation strategy is a core component of DORA’s ability to handle complex data processing tasks with limited resource overhead.
DORA’s architecture features a unified memory layout designed to eliminate redundant data transfer. This is achieved by allowing direct data access between processing nodes without the need for explicit data copying operations. Traditional distributed systems often require data to be copied between nodes for processing, incurring significant overhead. By sharing a unified memory space, DORA minimizes this overhead, enabling faster data exchange and improved overall system performance. This approach is particularly beneficial for data-intensive workloads and large-scale dataflows, where data movement can become a bottleneck.
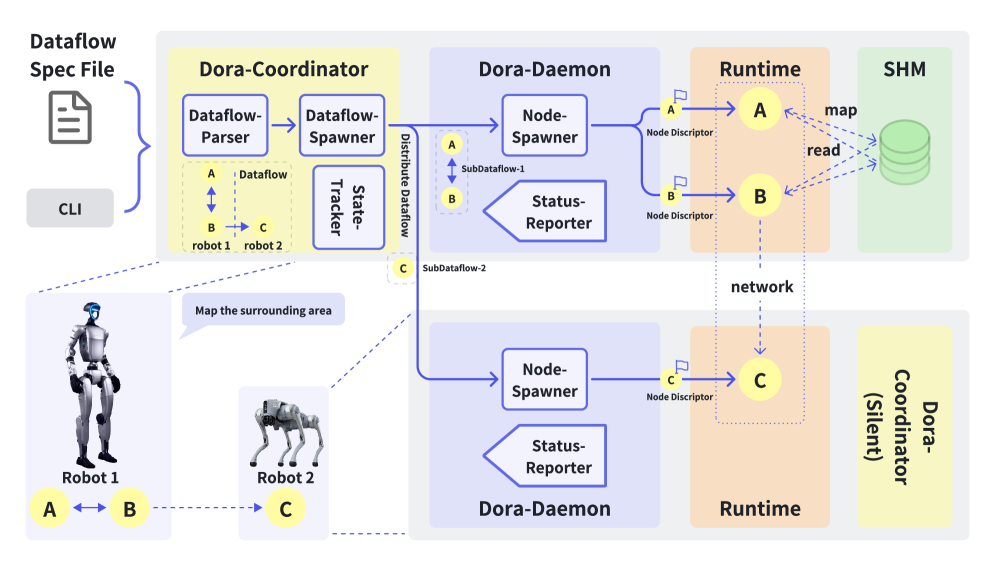
DORA utilizes two core internal components, Dora-Daemon and Dora-Coordinator, to orchestrate sub-dataflow execution and maintain system-wide coordination. Dora-Daemon instances are responsible for executing individual sub-dataflows, while the Dora-Coordinator manages the scheduling and distribution of these sub-dataflows across available Daemon instances. This collaborative architecture achieves data transmission latency of less than or equal to 0.8 milliseconds for communication between Daemons on the same node and less than or equal to 90 milliseconds for communication between Daemons on remote nodes. These latency figures are maintained through optimized inter-process communication and efficient data serialization protocols.
DORA in the Field: Unleashing Real-Time Potential
Robotic systems operating in dynamic environments demand exceptionally swift communication to ensure precise and responsive actions; DORA addresses this critical need through a low-latency architecture. This capability isn’t merely about speed, but fundamentally about control – enabling robots to react to changes in their surroundings, adjust movements mid-action, and execute complex tasks with a fluidity previously unattainable. Applications benefiting from this real-time control span a wide spectrum, from delicate surgical procedures requiring sub-millisecond responsiveness to high-speed manufacturing where coordinated movements between multiple robots are essential. The reduced delay allows for tighter control loops, minimizing errors and maximizing efficiency, ultimately pushing the boundaries of what’s possible in robotics and automation.
DORA’s highly efficient architecture unlocks the potential for remarkably complex robotic simulations, particularly when integrated with platforms like Isaac Sim. This capability dramatically accelerates the development and testing phases of robotic applications by allowing engineers to virtually prototype and refine algorithms in a realistic, physics-based environment. By minimizing computational bottlenecks, DORA facilitates the creation of large-scale simulations involving numerous robots and intricate scenarios, enabling thorough evaluation of perception, planning, and control strategies before deployment on physical hardware. This not only reduces development time and costs, but also enhances the robustness and reliability of robotic systems by proactively identifying and addressing potential issues in a safe, controlled, and scalable manner.
DORA’s capabilities extend to sophisticated robotic control, as demonstrated through its integration with the Franka Robotic Arm and utilization of the ACT Model – a framework for action, cognition, and translation. This pairing facilitates advanced perception and decision-making tasks, enabling robots to react with heightened precision and speed. Critically, DORA achieves this performance by dramatically reducing data transmission latency – up to 31.4 times faster than existing systems – while simultaneously minimizing computational load, achieving near-zero CPU utilization during data deserialization. This efficiency isn’t merely theoretical; it translates directly into smoother, more responsive robotic movements and the potential for real-time adaptation to dynamic environments, paving the way for more intelligent and versatile robotic applications.
The pursuit of efficient robotic systems, as detailed in the development of DORA, inherently demands a willingness to challenge established norms. This middleware’s focus on minimizing latency through optimized shared memory communication and a dataflow architecture isn’t simply about incremental improvement; it’s a fundamental re-evaluation of how robotic systems exchange information. As Linus Torvalds famously stated, “Talk is cheap. Show me the code.” DORA embodies this sentiment, offering a practical implementation that prioritizes performance and real-time capabilities, actively dismantling the constraints imposed by traditional serialization-based communication methods and proving that a different approach is not only possible, but demonstrably superior.
What’s Next?
The presented work dismantles a comfortable assumption: that robotic middleware must inevitably trade latency for abstraction. DORA’s success hinges on a willingness to expose the ‘plumbing’ – the direct memory access – traditionally hidden beneath layers of messaging and serialization. This begs the question: how far can this principle be extended? Future iterations must address the inevitable complexity that arises when scaling these direct-access mechanisms across heterogeneous robotic systems and increasingly sophisticated algorithms. The current reliance on shared memory, while effective, introduces inherent limitations in distributed scenarios; exploring alternative, equally lean communication paradigms will be crucial.
Furthermore, a true test of DORA’s architecture lies not merely in benchmark comparisons, but in its capacity to facilitate genuinely unexpected robotic behaviors. Current evaluations, however rigorous, operate within pre-defined constraints. The system’s robustness must be challenged by unpredictable workloads, dynamic task allocation, and the inherent noise of real-world deployment. Only then can one ascertain whether the reduction in latency translates to a demonstrable increase in adaptability and resilience.
Ultimately, DORA suggests a shift in focus: from building more versatile middleware to crafting middleware that actively yields control. By minimizing the overhead imposed by the software itself, the architecture allows the underlying hardware and algorithms to dictate performance. This is not simply an optimization; it is a philosophical statement – a tacit acknowledgement that the most powerful systems are often those that know when to get out of the way.
Original article: https://arxiv.org/pdf/2602.13252.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-02-17 20:22