Author: Denis Avetisyan
New research explores how a conversational hand-off between a social robot and a smartwatch can enhance indoor navigation and distribute cognitive effort.
This study investigates a multi-embodiment approach to indoor navigation, demonstrating the benefits of conversational hand-off for augmenting human spatial reasoning and reducing cognitive load.
Navigating complex indoor spaces demands cognitive resources while simultaneously limiting natural interaction with surroundings. This paper, ‘Robot-Wearable Conversation Hand-off for Navigation’, explores a novel approach to indoor guidance by seamlessly transitioning conversational support between a social robot and a wearable device. Our evaluation with [latex]\mathcal{N}=24[/latex] participants revealed that, while a wearable-only system was preferred, a conversational hand-off was experienced as engaging and potentially distributes cognitive load. How can we best design multi-embodied assistants to leverage the benefits of both robotic and wearable interfaces for truly augmented spatial reasoning?
The Fragility of Static Systems: Navigating Indoor Complexity
Conventional indoor navigation systems typically demand meticulously detailed, pre-existing maps of the environment, a requirement that introduces significant limitations. Creating and updating these maps is a laborious and expensive undertaking, particularly in dynamic spaces like hospitals, shopping malls, or construction sites where layouts frequently change. This reliance on static maps hinders adaptability; even minor alterations to the physical environment necessitate a complete re-mapping process, rendering the system temporarily unusable or inaccurate. Furthermore, maintaining map accuracy requires ongoing effort and resources, as even seemingly insignificant changes – relocated furniture, temporary obstructions, or seasonal displays – can disrupt navigation. The inflexibility of these pre-mapped solutions poses a considerable challenge to seamless and reliable indoor guidance, especially in spaces characterized by constant flux.
The difficulty many individuals experience with indoor navigation systems stems from the significant cognitive load these technologies often impose. Current systems frequently present information in a way that requires constant interpretation and decision-making – a complex map overlayed on a live video feed, for example, demands more attention than simply following directional cues. This constant mental effort can be fatiguing and, crucially, erodes user trust. When a system feels difficult to use, or requires users to double-check its instructions, confidence diminishes, and individuals are less likely to rely on it for guidance, preferring instead to navigate using familiar landmarks or, ultimately, seeking assistance from another person. This lack of trust is further compounded by inconsistencies in system accuracy, leading to frustration and a perceived lack of reliability.
Truly effective indoor navigation transcends simple pathfinding; it necessitates a system that anticipates and minimizes the cognitive burden on the user. Current approaches often demand constant attention to detailed maps or complex instructions, quickly leading to frustration and distrust. Instead, a robust solution prioritizes adaptability, dynamically responding to environmental changes – such as temporary obstructions or rearranged displays – without requiring constant remapping. This demands sophisticated algorithms capable of inferring location and intent from minimal sensor data, coupled with intuitive guidance cues that require little conscious effort to interpret. Ultimately, the goal is to create an experience where navigating an indoor space feels as natural and effortless as moving through a familiar outdoor environment, fostering user confidence and seamless wayfinding.

A Conversational Bridge: Adapting to the Flow of Interaction
The system utilizes a Conversational Agent (CA) to facilitate user interaction and guidance. This CA is designed to interpret natural language input and respond in a manner simulating human conversation, thereby minimizing the need for specialized training or complex command structures. The agent’s core functionality centers on understanding user requests related to navigation and task completion within the designated environment, and delivering instructions through spoken language. This approach prioritizes an intuitive user experience, allowing individuals to interact with the system using familiar conversational patterns, rather than requiring precise or technical inputs. The CA’s responses are dynamically generated based on the user’s current location, the defined task, and any previously established dialogue context.
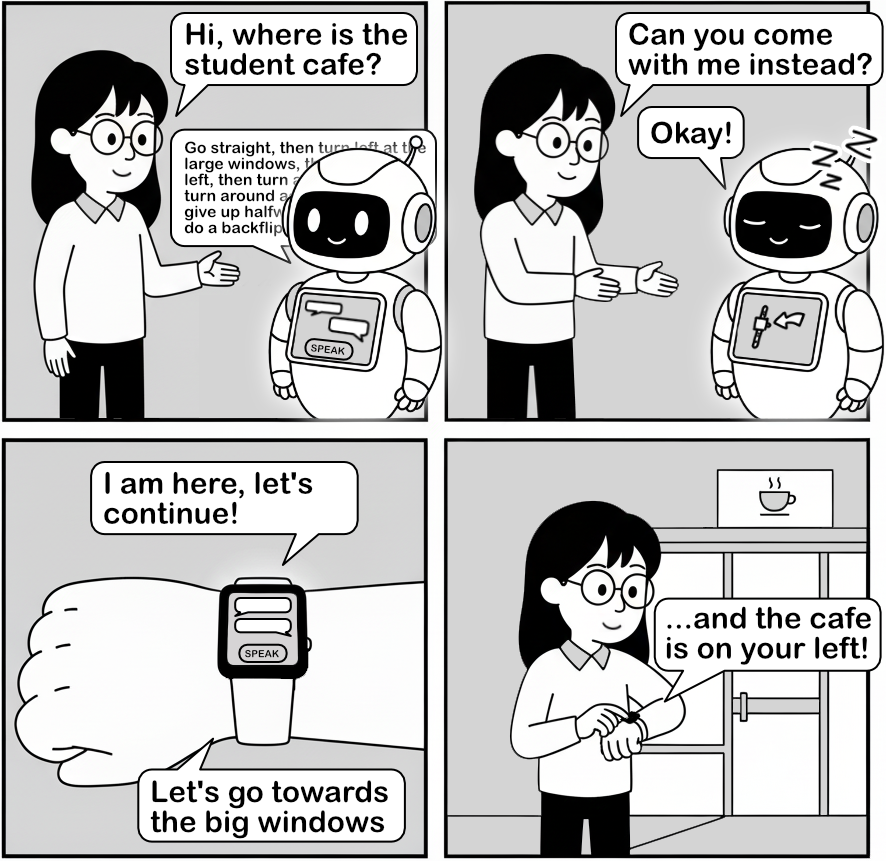
The system utilizes a stationary Social Robot as the initial host for the Conversational Agent (CA). This physical presence serves to establish the navigational context for the user, providing a fixed reference point within the environment. The robot delivers initial instructions regarding the system’s functionality and the intended navigation task, offering a clear starting point for interaction. This initial setup is crucial for orienting the user and ensuring they understand the expected workflow before transitioning to more mobile guidance solutions.
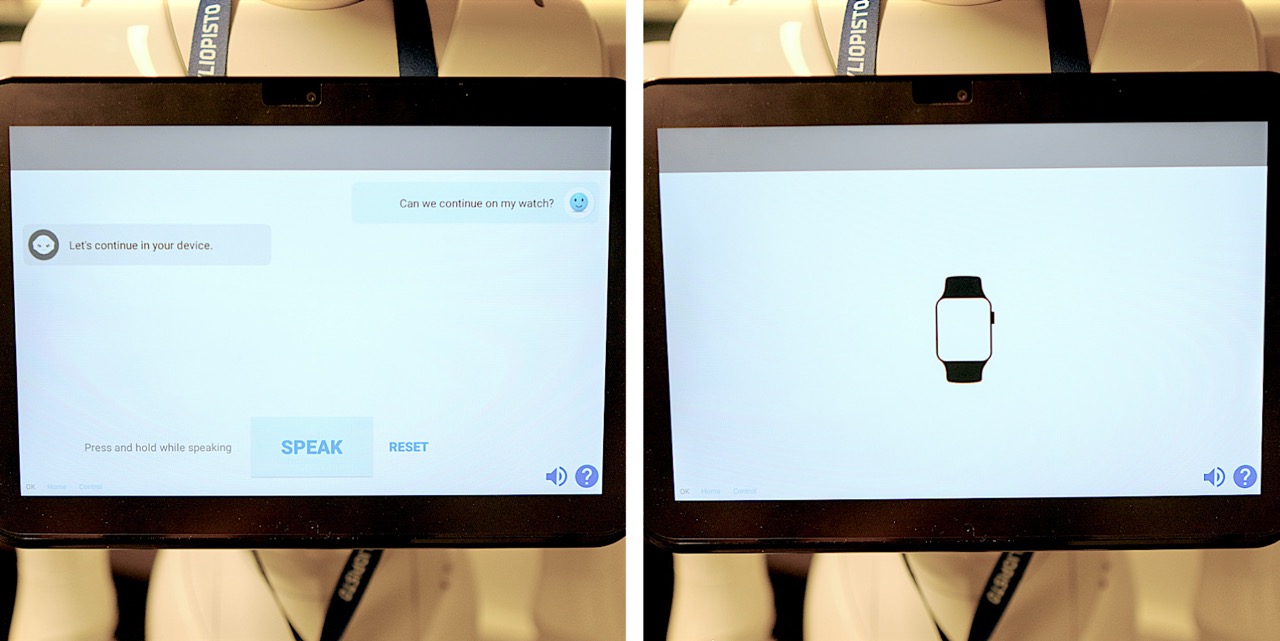
Following initial interaction with the Social Robot, the Conversational Agent (CA) functionality transitions to a Wearable Device to maintain consistent user support as the user navigates the environment. This transfer is designed to be automatic and unnoticeable, ensuring the CA remains accessible via voice or other appropriate input methods on the wearable. The Wearable Device facilitates uninterrupted guidance, eliminating the limitations imposed by the stationary robot and allowing the user to receive assistance regardless of their location within the operational area. This handoff preserves the conversational context and ensures the user experiences a continuous, unified interaction with the CA throughout the entire process.
Seamless Transitions: Maintaining Conversational Coherence
The conversation hand-off process utilizes contextual awareness and shared memory between the Social Robot and Wearable Device to ensure a seamless transfer of dialogue management. This is achieved by continuously synchronizing user intent and conversation state data; when a shift in interaction modality is required – for example, transitioning from voice command to a wearable-mediated response – the system avoids re-prompting or requiring the user to reiterate information. The goal is to maintain conversational flow by anticipating the user’s needs and pre-loading relevant data on the receiving device, thereby minimizing latency and perceived disruption to the user experience. Successful hand-off is measured by tracking instances of re-prompting and user-reported instances of conversational fragmentation.
Proxemic interaction, enabled by the conversation hand-off process, allows the system to dynamically adjust its behavior based on the user’s physical distance and surrounding social environment. The system utilizes data from both the Social Robot and Wearable Device to determine the user’s proximity to objects and other individuals. This data informs the level of assistance provided; for example, the system may offer detailed guidance when the user is further from an object, and switch to brief confirmations when in close proximity. Social context is also considered, with the system modulating its responses based on detected co-presence and inferred social relationships, ensuring interactions are appropriate for the situation.
Both the Social Robot and Wearable Device utilize Automatic Speech Recognition (ASR) technology to process user vocalizations into actionable commands. The ASR systems are designed to handle variations in speech patterns, accents, and ambient noise to maximize accuracy. Processed speech data is then analyzed using Natural Language Understanding (NLU) to determine user intent, enabling the devices to provide contextually relevant assistance. This includes executing pre-programmed functions, accessing information, and triggering further interactions, all based on the interpreted speech input. Performance metrics for the ASR systems include Word Error Rate (WER) and Sentence Error Rate (SER), which are continuously monitored and improved through machine learning techniques.

Validating Performance: A Measured Response to Cognitive Load
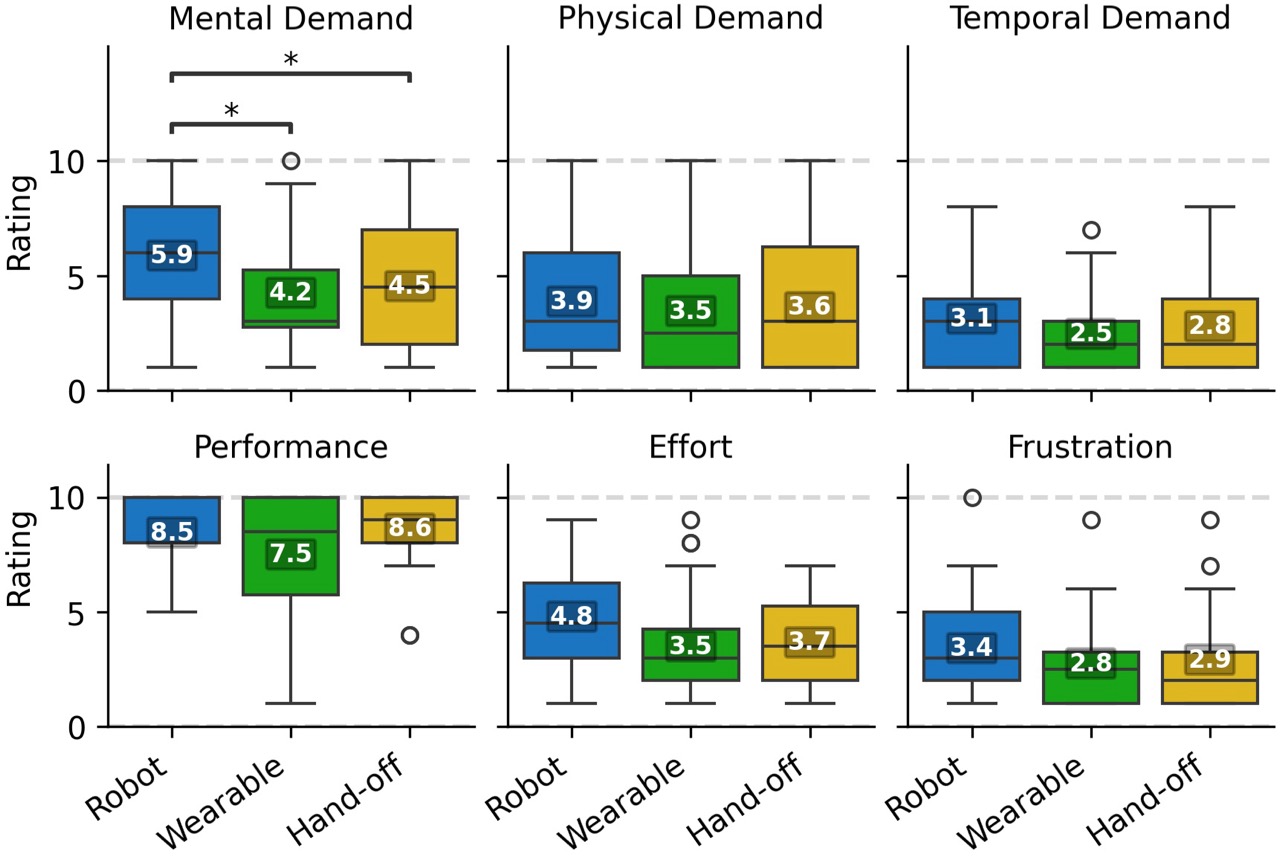
Evaluations using the NASA-RTLX questionnaire revealed a compelling parity in practical performance between the novel conversational hand-off system and traditional single-device approaches. Specifically, researchers observed no statistically significant differences in the time required to complete tasks, the frequency of errors made during those tasks, or the number of interactions needed to achieve completion. This suggests that the hand-off system does not impose a performance penalty on users, maintaining efficiency comparable to directly using a single device for the entire workflow. The findings highlight the potential for this technology to offer a more flexible and adaptable user experience without sacrificing productivity or increasing the likelihood of mistakes.
Analysis utilizing the NASA-RTLX questionnaire revealed a significant increase in the mental demand experienced by participants when interacting with the robotic assistance condition, exceeding that of both the wearable device and conversational hand-off systems (p < 0.01). This suggests that, while functionally comparable in task completion, utilizing a physical robot necessitates a greater degree of cognitive effort from the user. The increased mental workload may stem from the need for heightened attention to the robot’s movements, anticipating its actions, or managing the complexities of physical interaction – factors less prominent when employing wearable technology or voice-based hand-off methods. These findings highlight the importance of minimizing cognitive burden in human-robot interaction to ensure user comfort and sustained performance.
Evaluations utilizing the NASA-RTLX questionnaire revealed a trend suggesting increased cognitive effort for participants interacting with the robotic system, although this difference did not reach statistical significance after further analysis. While users did not take longer to complete tasks, nor did they make more errors with the robot compared to wearable or conversational hand-off interfaces, the initial data hinted at a potentially higher mental workload. Post-hoc testing refined this understanding, indicating the observed increase in effort was not substantial enough to be definitively attributed to the robotic condition, suggesting the system’s usability didn’t significantly hinder performance despite potentially requiring slightly more conscious attention.
The study illuminates a fundamental truth regarding complex systems: their inherent tendency toward decay. Just as infrastructure succumbs to erosion over time, so too does human cognitive capacity strain under the weight of spatial reasoning. The research demonstrates how a conversational hand-off between robotic and wearable interfaces functions as a temporary bulwark against this decay, distributing cognitive load and augmenting human capabilities. This aligns with Dijkstra’s observation: “It’s not enough to have good intentions, you also need to have good tools.” The tools explored-robot and smartwatch-are not solutions, but rather methods for gracefully managing the inevitable challenges of navigating complex environments and preserving cognitive resources, recognizing that even the most elegant system will eventually require adaptation or renewal.
What Lies Ahead?
The preference for a wearable-only navigation system, while perhaps a pragmatic observation, subtly underscores a persistent tension. The allure of seamless integration consistently outweighs the theoretical benefits of distributed cognition-a predictable trajectory, given the ingrained human desire to minimize apparent effort. Yet, to dismiss the hand-off approach as merely a stepping stone would be short-sighted. The study reveals not a failure of concept, but a revealing of cognitive friction-the cost of switching attention, of re-evaluating information presented across modalities. Every delay is the price of understanding, and this friction, rather than being eliminated, may be architecturally valuable.
Future work must address the temporal dynamics of this interaction. The current findings represent a snapshot; understanding how trust and reliance shift over repeated interactions, and with varying degrees of environmental complexity, remains crucial. Furthermore, the study implicitly acknowledges the importance of proxemics-the spatial relationship between the user, the robot, and the environment. A deeper exploration of how conversational cues and robotic gestures can subtly guide attention, reducing cognitive load before explicit instructions are needed, would be a significant advancement.
Architecture without history is fragile and ephemeral. This field risks perpetually chasing the illusion of ‘natural’ interaction-a static ideal. Instead, a focus on the evolving relationship between user and agent-on the accumulated ‘wear and tear’ of repeated interaction-offers a more robust, and ultimately more insightful, path forward. The true measure of success will not be in masking the mechanics of assistance, but in building systems that age gracefully alongside their users.
Original article: https://arxiv.org/pdf/2602.14831.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-02-17 10:27