Author: Denis Avetisyan
Researchers have developed an underwater robot that mimics the graceful movements of a manta ray, offering a new approach to efficient and stable autonomous exploration.
This review details the design, control, and experimental validation of a flapping-wing robot demonstrating stable underwater swimming and diving with minimal seabed disturbance.
Traditional underwater robotic systems often rely on propeller-driven locomotion, which can disturb sensitive environments and limit maneuverability. This study addresses these challenges through the development of a biomimetic manta ray robot, detailed in ‘Biomimetic Mantaray robot toward the underwater autonomous — Experimental verification of swimming and diving by flapping motion -‘, and experimentally verifies its swimming and diving capabilities via flapping motion. Results demonstrate stable underwater locomotion and precise control using a Raspberry Pi-based system and PD control, minimizing seabed disturbance. Could this bio-inspired approach unlock new possibilities for ecological monitoring and efficient underwater exploration in delicate aquatic ecosystems?
Breaking the Surface: The Limits of Traditional Underwater Propulsion
The prevalent use of screw propulsion in underwater robotics, while historically effective, encounters substantial limitations in environments with low visibility. Turbid waters, laden with suspended particles, drastically reduce the efficiency of these propellers; the energy imparted to the water is dissipated by collisions with sediment and organic matter rather than contributing to forward motion. This phenomenon not only demands significantly higher energy expenditure for the same level of performance, shortening operational durations, but also introduces cavitation and increased wear on the propulsion system itself. Consequently, robots operating in realistic conditions – estuaries, coastal zones, or areas affected by algal blooms – experience a marked decrease in maneuverability and an amplified demand on their power resources, prompting researchers to explore alternative, more sustainable, and efficient locomotion strategies.
Conventional underwater robotic propulsion, while effective in clear conditions, introduces substantial turbulence into the aquatic environment. This mechanical disturbance isn’t merely an efficiency issue; it poses a genuine threat to fragile ecosystems. Delicate coral reefs, spawning grounds, and the sensitive sensory systems of marine life are all vulnerable to the swirling currents generated by propeller-driven robots. Consequently, researchers are increasingly turning to biomimicry – the imitation of biological systems – to develop alternative propulsion methods. Designs inspired by the undulating fins of fish, the jet propulsion of jellyfish, or even the cilia-based movement of microorganisms offer the potential for significantly reduced turbulence and a far gentler interaction with the underwater world, promising a future where robotic exploration and environmental preservation can coexist.
Current underwater robotic systems frequently exhibit limitations in navigating complex underwater environments, stemming from challenges in achieving both intricate maneuverability and precise control. Traditional designs often rely on a limited range of movements, hindering their ability to explore confined spaces, inspect delicate structures, or respond effectively to unpredictable currents. This lack of fine-grained control significantly impedes comprehensive environmental monitoring, as robots struggle to maintain stable positioning for detailed data acquisition or to delicately interact with sensitive ecosystems. Consequently, tasks requiring nuanced movements – such as sample collection, close-range visual inspection, or precise instrument placement – remain difficult, limiting the effectiveness of robotic exploration and hindering scientific progress in underwater research.
Reverse-Engineering Nature: Bio-Inspired Design for Enhanced Robotics
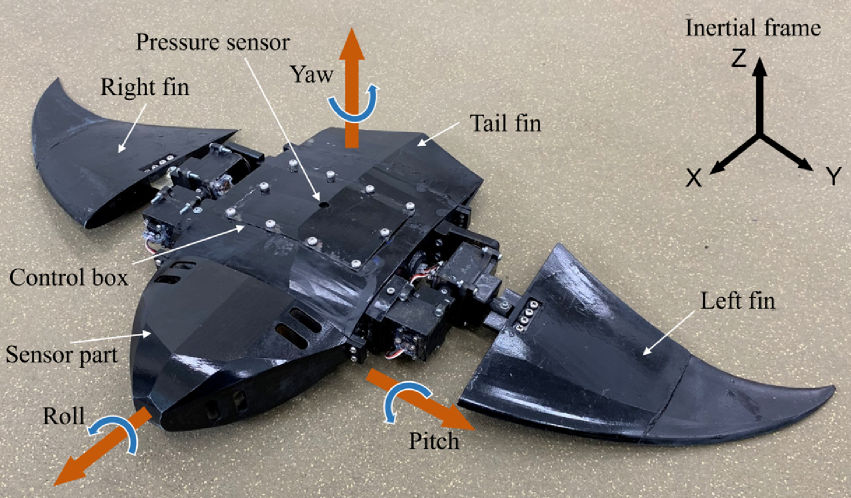
The current research investigates bio-inspired robotics, with a primary focus on replicating the structural and movement characteristics of manta rays and other aquatic organisms. This approach leverages the evolutionary optimization inherent in natural designs to address challenges in underwater robotics. Specifically, the morphology – the form and structure – of these species is analyzed to inform the design of robotic systems. Furthermore, the locomotion strategies employed by these animals, including fin movements and body undulations, are studied to develop more efficient and maneuverable robotic propulsion methods. The goal is to translate observed biological principles into functional robotic designs, potentially yielding improvements in areas such as stability, speed, and energy consumption.
The robotic design features flexible fins constructed to replicate the structural properties of natural manta ray pectoral fins, specifically their combined rigidity and elasticity. These fins are paired with a streamlined airfoil profile – the NACA 0020 – which is implemented to minimize drag during underwater locomotion. The NACA 0020 airfoil’s symmetrical geometry contributes to predictable lift and reduced pressure differential, improving hydrodynamic efficiency and allowing for precise control of the robotic vehicle.
Flapping locomotion, as opposed to traditional propeller-driven underwater vehicles, offers potential advantages in both maneuverability and energy consumption. Empirical data and computational fluid dynamics simulations indicate that oscillating foils generate thrust via the creation and shedding of vortices, enabling rapid changes in direction and efficient forward propulsion. This method minimizes reliance on continuous thrust, reducing energy expenditure during cruising and allowing for precise positional control, particularly in confined or complex environments. The efficiency gains stem from the ability to recapture energy within each stroke cycle and leverage the inherent hydrodynamics of vortex shedding, resulting in a higher thrust-to-power ratio compared to conventional systems.
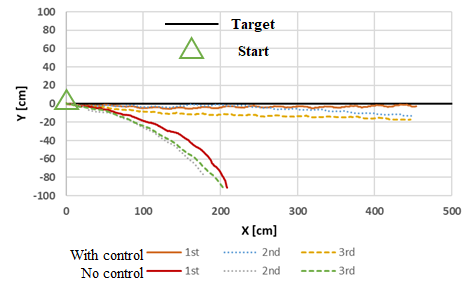
![Employing Proportional-Derivative (PD) control [latex] (K_p, K_d) [/latex] significantly stabilizes the robot's trajectory during a diving motion, as demonstrated by the smoother, controlled path compared to the uncontrolled descent.](https://arxiv.org/html/2602.10904v1/x9.png)
Decoding Movement: Implementing Natural Movement Patterns
Central Pattern Generators (CPGs) form the core of the robot’s locomotion system, producing the repetitive, cyclical neural patterns necessary for coordinated movement. This bio-inspired approach models the neural networks found in aquatic animals, enabling the generation of rhythmic outputs for actuators without requiring constant high-level control. The CPG network consists of interconnected oscillators, each representing a degree of freedom in the robot’s morphology; these oscillators, when stimulated, produce phase-shifted output signals that drive the actuators in a coordinated fashion, resulting in fluid and naturalistic swimming gaits. By adjusting parameters like oscillator frequency and amplitude, the CPG network can be tuned to produce different swimming behaviors and adapt to varying environmental conditions.
Non-harmonic gait control was implemented to move beyond the limitations of traditional, symmetrical locomotion patterns. Manta ray movement is characterized by asynchronous and variable fin undulation, creating thrust and maneuverability not achievable with harmonic gaits. This system utilizes a control architecture that allows for independent modulation of each pectoral fin, replicating the observed asymmetry in ray swimming. This approach enhances both the realism of the robot’s movements and its hydrodynamic efficiency, enabling more complex maneuvers and reducing energy expenditure compared to systems employing purely sinusoidal or symmetrical patterns.
The robot’s control system integrates an Inertial Measurement Unit (IMU) for real-time orientation and motion data acquisition. This data feeds into a Proportional-Derivative (PD) control loop, which actively stabilizes the robot and minimizes deviations from the desired trajectory. Computational processing is distributed between a Raspberry Pi 3B, responsible for higher-level control algorithms and data logging, and an Arduino Nano, which handles low-level motor control and actuation. This architecture allows for both complex behavioral planning and precise, responsive movement execution.
Central Pattern Generator (CPG) parameters were refined using Particle Swarm Optimization (PSO) to maximize both the performance and adaptability of the robotic system. Testing demonstrated the robot achieved a stable swimming speed of approximately 20 cm/s after an initial 5-second stabilization period. Over a 20-second duration, the robot successfully traveled a distance of 500 cm, indicating consistent and reliable locomotion based on the optimized CPG parameters. This performance level was achieved through iterative refinement of the CPG, allowing the robot to effectively navigate and maintain a consistent trajectory.
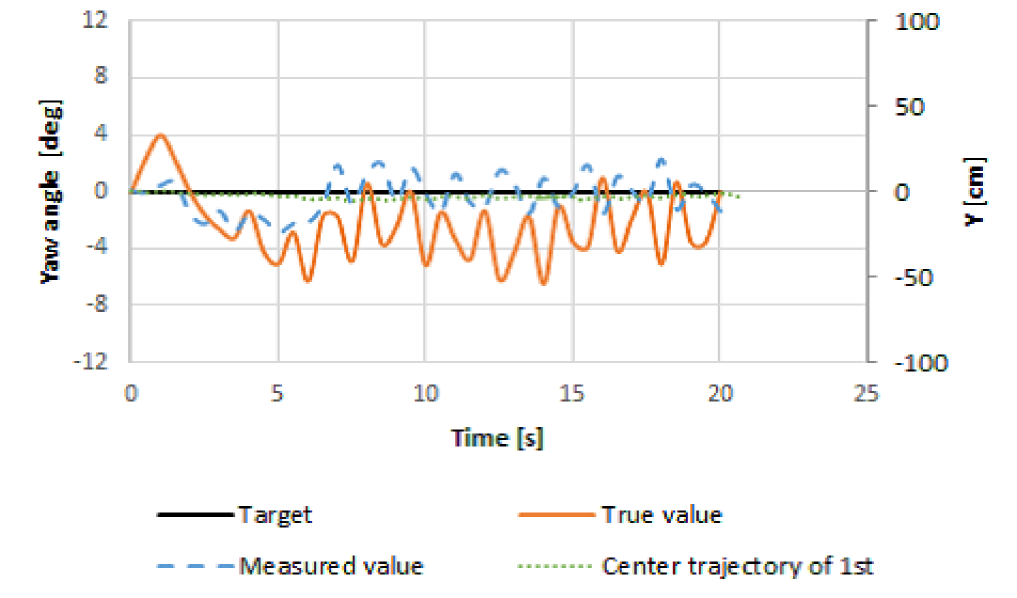
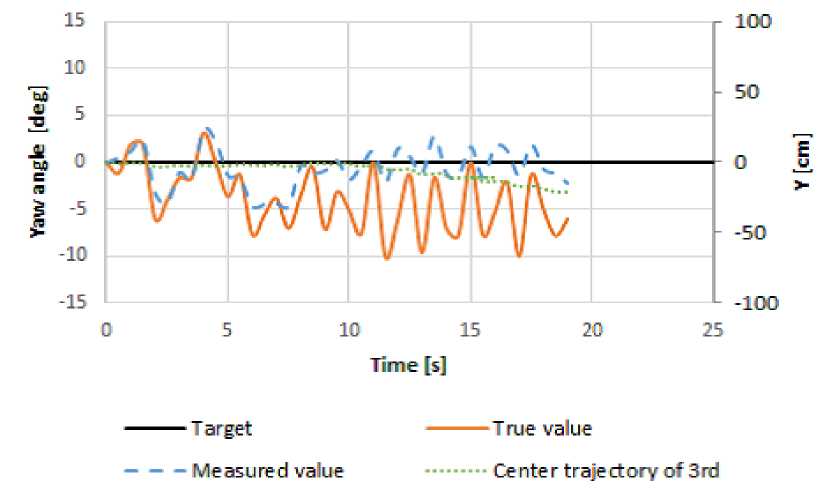
Implementation of Proportional-Derivative (PD) control resulted in a measured yaw angle variation consistently maintained between -6 and +4 degrees during testing. This limited angular deviation indicates a high degree of stability in the robot’s heading and demonstrates the effectiveness of the PD control loop in minimizing rotational errors. The narrow range of yaw angle variation confirms the robot’s ability to maintain a consistent direction with minimal corrective action, crucial for efficient and realistic locomotion.
Beyond Mimicry: Versatile Locomotion and Expanding Frontiers
The robotic platform exhibits a remarkable capacity for aquatic locomotion, achieving versatility through the implementation of multiple propulsion methods. Beyond conventional means, the robot leverages Body and Caudal Fin (BCF) propulsion, mimicking the swift, powerful movements of mackerel and the undulating grace of eels to facilitate high-speed maneuvers and rapid directional changes. Complementing this is the use of Median and Paired Fin (MPF) propulsion, modeled after the precise, deliberate swimming style of the boxfish, allowing for exceptional control and stability – particularly crucial when navigating confined spaces or conducting detailed inspections. This dual-propulsion system enables the robot to seamlessly transition between speed and precision, adapting its swimming style to the demands of the underwater environment and task at hand.
The robot’s capacity for independent underwater operation hinges on sophisticated object detection and stereo matching algorithms. These systems allow the robot to construct a three-dimensional understanding of its surroundings, identifying obstacles and features within the aquatic environment. By processing visual data from onboard cameras, the algorithms not only facilitate autonomous navigation – enabling the robot to chart courses and avoid collisions – but also empower it to interact with submerged structures. This interaction includes tasks like targeted inspection of coral reefs, precise manipulation of underwater instruments, and the focused collection of data from specific points of interest, all without requiring constant human guidance. The resulting spatial awareness and interactive capabilities are critical for effective exploration and monitoring in complex underwater settings.
Rigorous testing of the robot’s diving capabilities revealed a maximum positional error of 21.4 centimeters, consistently manifesting as a deviation to the right during descent and ascent. This measured error, while relatively small considering the complexities of underwater navigation and potential disturbances, provides critical data for refining the control algorithms and improving the precision of future dives. Researchers believe this consistent directional bias suggests a slight asymmetry in the robot’s ballast or propulsion system, prompting further investigation into achieving perfectly balanced underwater maneuvering. Understanding and mitigating this deviation is essential for tasks requiring pinpoint accuracy, such as inspecting delicate coral reefs or precisely deploying sensors in specific locations.
The robot’s versatile locomotion unlocks new possibilities for underwater research and intervention. Its ability to seamlessly transition between swimming styles-from the rapid maneuvers suited for open water to the precise control needed in confined spaces-allows for efficient exploration of complex underwater structures like coral reefs and shipwrecks. This adaptability isn’t merely about movement; it directly enhances the accuracy of marine ecosystem monitoring, enabling detailed observation of delicate habitats and species. Furthermore, the robot’s controlled navigation facilitates targeted data collection, allowing researchers to focus on specific areas of interest and gather high-resolution information crucial for understanding and protecting our oceans.
The development detailed in this research isn’t merely about replicating manta ray locomotion; it’s a systematic probing of hydrodynamic principles. The robot’s capacity for stable swimming and diving, achieved through precise PD control of flapping motion, represents a challenge to conventional underwater vehicle design. As Edsger W. Dijkstra once stated, “It’s not enough to just do something; you must understand why it works.” This sentiment directly reflects the approach taken here. The team didn’t simply build a biomimetic robot; they dissected the underlying physics of manta ray propulsion, pushing the boundaries of what’s possible in underwater autonomous exploration and minimizing seabed disturbance – a deliberate ‘what if’ applied to ecological impact.
Where Do We Go From Here?
This work, predictably, exposes more questions than it answers. The successful replication of manta ray locomotion isn’t about achieving elegant movement; it’s about admitting the limitations of current robotic paradigms. Every exploit starts with a question, not with intent. The demonstrated stability, while encouraging, remains tethered to relatively controlled conditions. Scaling this biomimetic approach necessitates confronting the hydrodynamic complexities of real-world environments – currents, turbidity, and the unpredictable behaviour of marine life. Simply increasing size won’t suffice; a fundamental reassessment of sensing and adaptive control is required.
The minimal seabed disturbance is a notable achievement, yet it hints at a larger problem: current underwater exploration often relies on disturbance. The ability to map, sample, and interact with the environment requires a degree of intrusion. The challenge, then, isn’t just replicating natural movement, but redefining the purpose of underwater robotics. Is the goal to observe without impact, or to actively manipulate and understand? This distinction shifts the entire design space.
Future iterations will undoubtedly focus on energy efficiency and autonomous navigation. However, the true test lies in moving beyond pre-programmed behaviours. A truly intelligent manta ray robot won’t just respond to its environment; it will anticipate it, learning from past experiences and adapting its strategy accordingly. This necessitates a move towards embodied artificial intelligence – a system where perception, cognition, and action are inextricably linked, mirroring the elegant simplicity of the natural world.
Original article: https://arxiv.org/pdf/2602.10904.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-02-12 07:49