Author: Denis Avetisyan
Researchers have developed a new graphical interface that leverages artificial intelligence to simplify the creation of complex robot behaviors.
This paper details the design and evaluation of BETR-GUI, an AI-assisted tool for building behavior trees in robotics using large language models, automated planning, and genetic optimization.
Creating reactive robot programs remains a challenge, often requiring extensive programming expertise. This limitation motivates the work presented in ‘Design and Evaluation of an Assisted Programming Interface for Behavior Trees in Robotics’, which introduces BETR-GUI, a novel graphical interface combining AI assistance-leveraging large language models, planning, and optimization-with a drag-and-drop editor for behavior tree creation. User studies with 60 participants demonstrate that BETR-GUI significantly improves performance in robot programming tasks compared to both manual creation and AI-only approaches. Could this integrated approach unlock more intuitive and efficient methods for widespread robot programmability?
The Illusion of Control: Introducing Behavior Trees
Conventional artificial intelligence systems frequently encounter limitations when addressing tasks demanding intricate, real-time responses and layered judgment. These systems, often reliant on monolithic logic or rule-based approaches, can become unwieldy and inefficient as complexity increases. The challenge lies in managing the numerous conditional checks and potential outcomes inherent in dynamic environments. Consequently, traditional AI can struggle with maintaining responsiveness and adaptability, particularly in scenarios requiring nuanced prioritization and the ability to seamlessly switch between different behavioral strategies. This difficulty stems from a fundamental limitation in representing and executing hierarchical decision-making processes in a scalable and maintainable fashion, paving the way for alternative architectures like Behavior Trees.
Behavior Trees offer a distinct advantage in artificial intelligence by structuring complex behaviors as a modular hierarchy of tasks and conditions. Unlike traditional AI approaches which can become monolithic and difficult to manage, BTs decompose problems into smaller, independent nodes – each responsible for a specific action or evaluation. This modularity allows for easy modification, extension, and reuse of behavioral components. The tree-like structure facilitates a clear flow of control, where the AI systematically evaluates conditions and executes actions based on prioritized pathways. This results in more robust, adaptable, and maintainable AI systems capable of handling intricate, real-time decision-making processes, particularly in dynamic environments where reactivity is paramount.
Drawing inspiration from the study of animal behavior – ethology – Behavior Trees facilitate problem-solving by mirroring the hierarchical organization found in natural action sequences. Rather than a monolithic block of code, a complex task is broken down into smaller, prioritized steps, much like an animal assessing and responding to stimuli. This decomposition allows for a clear and intuitive representation of decision-making processes; high-priority behaviors, such as immediate threat response, are addressed first, while lower-priority actions, like foraging, are handled subsequently. The modular nature of these trees enables easy modification and extension, allowing developers to readily adapt behaviors without disrupting the overall system, and mirroring the way animals learn and refine their responses to changing environments.
Automating the Inevitable: A Multi-Method Approach
The BETR-GUI utilizes artificial intelligence to streamline the creation and refinement of Behavior Trees (BTs). This automation is achieved through the integration of multiple AI techniques, including automated planning, genetic programming, and large language models. The system’s AI components work in concert to generate initial BT structures based on defined task goals, then iteratively improve these structures by evaluating performance and applying evolutionary algorithms. This process reduces the need for manual BT design, allowing for faster prototyping and optimization of agent behaviors, and enabling the creation of more complex and adaptable systems.
Automated Planning employs a PDDL (Planning Domain Definition Language) Planner to construct initial Behavior Tree (BT) structures through a process known as goal-directed reasoning, or back-chaining. This involves defining high-level task goals and utilizing the PDDL Planner to decompose these goals into a sequence of lower-level actions and preconditions. The planner identifies necessary sub-tasks and their dependencies, translating this logical decomposition into a hierarchical BT representation. Specifically, task goals become root nodes, and the identified sub-tasks are recursively added as child nodes, forming a basic BT framework that can then be refined and optimized through other methods like Genetic Programming.
Genetic Programming (GP) is employed to refine Behavior Tree (BT) structures through an evolutionary process governed by the GP Algorithm. This involves maintaining a population of BTs, each representing a potential solution. BTs are evaluated based on their performance against defined criteria, and the highest-performing individuals are selected for reproduction. Reproduction occurs through two primary mechanisms: crossover, where portions of two parent BTs are exchanged to create offspring, and mutation, which introduces random alterations to a BT’s structure. These processes generate new BT variations, and the cycle of evaluation, selection, crossover, and mutation repeats iteratively, driving the population towards improved performance characteristics. The GP Algorithm utilizes fitness functions to quantitatively assess each BT’s efficacy, allowing for objective comparison and selection of superior designs.
Large Language Models (LLMs) contribute to Behavior Tree (BT) automation by generating reusable BT components, such as condition and action nodes, based on natural language prompts describing desired behaviors. Beyond component creation, LLMs analyze existing BT structures to identify potential errors, including logical inconsistencies and unreachable nodes. Error resolution is facilitated through LLM-generated suggestions for correction, often presented as code modifications or alternative node configurations. This assistance reduces manual debugging time and improves the overall robustness of automatically generated Behavior Trees, particularly in complex scenarios.

Validating the Illusion: Simulation and Optimization
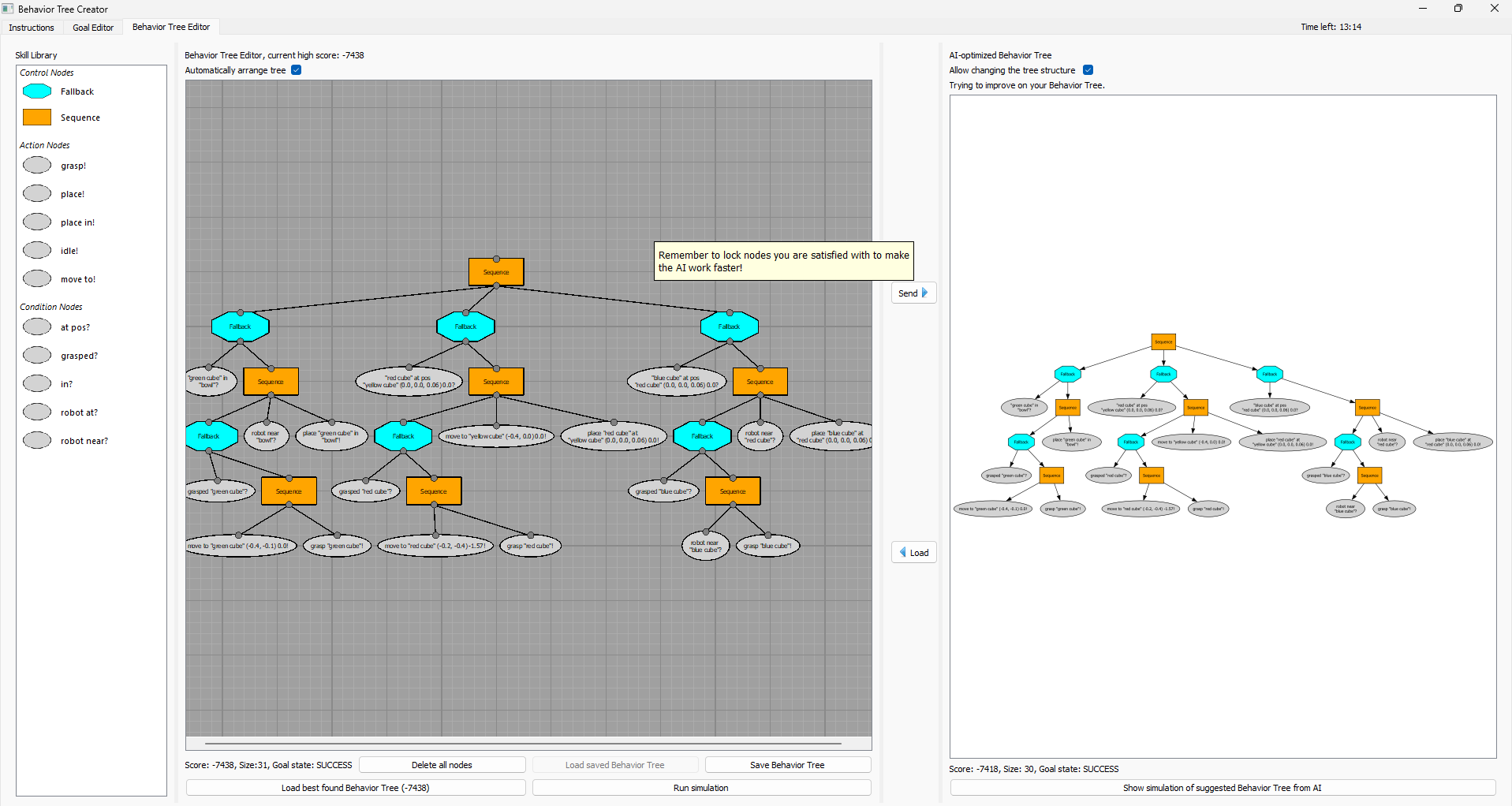
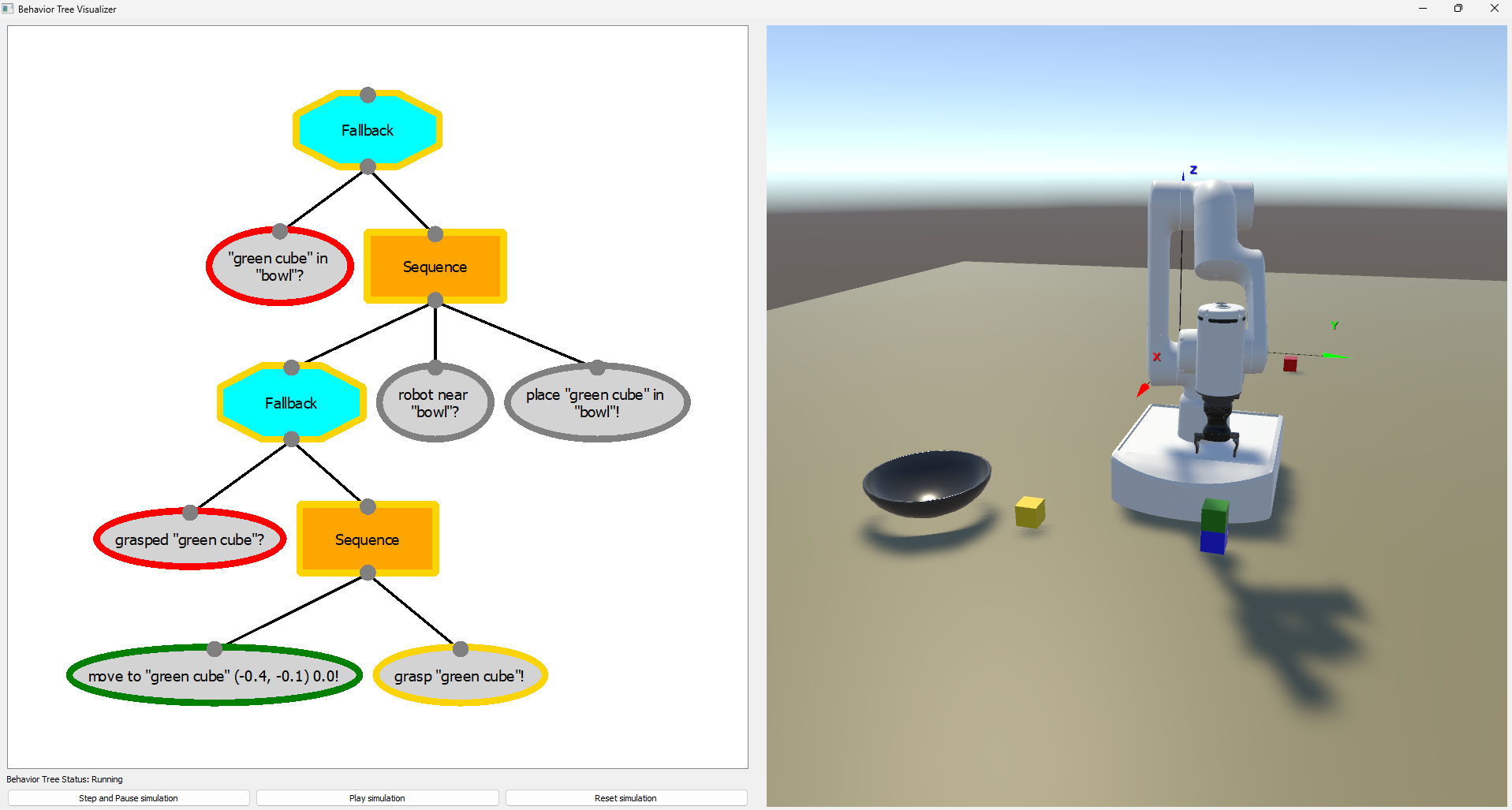
The Behavior Tree Runtime – Graphical User Interface (BETR-GUI) incorporates a dedicated Simulation Environment designed for rigorous, physics-based testing of Behavior Trees (BTs). This environment allows developers to evaluate BT performance under controlled, repeatable conditions, simulating real-world scenarios without requiring deployment to physical robots or agents. The simulation leverages a physics engine to model agent interactions with the environment and provides metrics for assessing BT execution, including task completion rates, resource utilization, and execution time. This capability facilitates iterative development and optimization of BTs prior to implementation on target hardware, reducing development cycles and improving robustness.
Bayesian Optimization is employed within the BETR-GUI simulation environment to automatically improve Behavior Tree (BT) performance. This process involves iteratively modifying the structure of a BT – specifically the arrangement of Control Flow, Execution, Condition, and Action Nodes – and then evaluating the resulting policy’s effectiveness. The optimization algorithm uses the simulation results to build a probabilistic model of the relationship between BT structure and task performance, allowing it to intelligently propose new BT configurations that are likely to yield improvements. This iterative evaluation and refinement cycle continues until a satisfactory level of performance is achieved, as demonstrated by the significantly higher task scores of the FULL AI assistant variant compared to the MANUAL_ONLY variant.
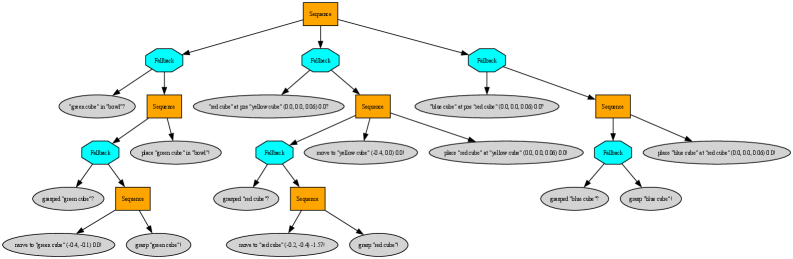
Behavior Tree (BT) performance is directly attributable to the configuration of its core node types. Control Flow Nodes, such as Sequences, Selectors, and Parallel nodes, dictate the order and conditions under which child nodes are executed. Execution Nodes manage the execution of their children, potentially returning success, failure, or running status. Condition Nodes evaluate specific criteria and return a boolean result, influencing the flow of execution. Finally, Action Nodes perform specific tasks or operations within the environment. The arrangement and interconnections of these node types define the reactive policy implemented by the BT, and therefore fundamentally determine its efficiency and effectiveness in achieving desired outcomes.
Behavior Tree (BT) performance is assessed by evaluating the reactive policies generated from the combination of Control Flow, Execution, Condition, and Action Nodes. Task Performance metrics are used to quantify policy effectiveness; comparative analysis demonstrates the FULL AI assistant variant consistently achieves significantly higher task scores than the MANUAL_ONLY variant. This indicates that automated refinement of BT structures, facilitated by the integrated simulation environment and Bayesian Optimization, results in demonstrably improved AI agent behavior as measured by objective task completion rates.
The Inevitable Expansion: Future Directions
The Behavior Tree Runtime – Graphical User Interface (BETR-GUI) represents a significant advancement in the creation of sophisticated, autonomous systems. By leveraging underlying artificial intelligence methodologies, it facilitates the design and implementation of complex behaviors for virtual agents and robots. This technology moves beyond pre-programmed responses, enabling systems to dynamically assess situations and execute actions appropriate to the given context. The BETR-GUI’s architecture supports the construction of intricate decision-making processes, allowing for the management of numerous concurrent tasks and the prioritization of goals. Consequently, developers can build agents capable of navigating challenging environments, interacting with users in a meaningful way, and achieving objectives that demand flexibility and adaptability – all within a visually intuitive interface.
The advent of Behavior Tree Editor – Graphical User Interface (BETR-GUI) and its supporting artificial intelligence methodologies signals a potential paradigm shift across multiple fields reliant on complex, decision-making systems. Robotics stands to benefit from more nuanced and adaptable machine behaviors, moving beyond pre-programmed routines toward truly responsive and intelligent machines. Within game AI, BETR-GUI promises more believable and challenging non-player characters capable of dynamic strategies and emergent gameplay. Perhaps most significantly, the technology offers a pathway toward genuinely autonomous agents – systems that can perceive their environment, reason about goals, and act effectively without constant human intervention, opening doors for innovation in areas ranging from self-driving vehicles to advanced personal assistants. This capacity for creating intelligent systems, capable of learning and adapting, positions BETR-GUI as a foundational technology for the next generation of automated solutions.
Ongoing research aims to imbue Behavior Trees with the capacity for continuous learning and self-improvement. Currently, these trees are largely defined by expert knowledge or manually tuned parameters; however, integrating machine learning algorithms will allow them to dynamically adjust their structure and behavior based on experience. This adaptive capability promises to overcome limitations in handling unforeseen circumstances and optimizing performance in dynamic environments. By allowing Behavior Trees to learn from data, future systems will not only execute pre-defined tasks more efficiently but also acquire new skills and refine existing ones, ultimately leading to more robust and intelligent autonomous agents capable of operating with greater flexibility and independence.
Evaluations consistently demonstrate that the FULL, NO_BO, and NO_GP variants of the Behavior Tree Graphical User Interface (BETR-GUI) provide a demonstrably superior user experience. Comparative preference rankings, alongside scores from the standardized System Usability Scale (SUS), repeatedly favored these configurations over alternative designs. This suggests that the inclusion of all available features, combined with the exclusion of both behavior-only and goal-prioritized options, strikes an optimal balance between functionality and ease of use for designers creating complex, branching behaviors. These findings are crucial for guiding future development, reinforcing the importance of a comprehensive, yet streamlined, interface for effective Behavior Tree authoring and ultimately, the creation of more intelligent and adaptive systems.
The pursuit of automated assistance in robotics, as demonstrated by BETR-GUI, echoes a familiar pattern. Systems intended to simplify creation often reveal unforeseen complexities. The interface, while promising improved user performance through LLMs and automated planning, isn’t a finished product, but a seed. As Marvin Minsky observed, “The more we learn about intelligence, the more we realize how much we don’t know.” This echoes through the study’s ablation tests; each removed component reveals the fragile interdependence within the system. BETR-GUI doesn’t solve the problem of behavior tree creation; it merely shifts the locus of challenge, exposing new dependencies and vulnerabilities as it grows. It is a testament to the fact that every refactor begins as a prayer and ends in repentance.
The Seeds of Future Complexity
This work, like all attempts to codify intelligence, builds a beautiful cage. BETR-GUI offers a compelling vision of assisted behavior tree creation, yet every automation invites a new class of failure. The interface shifts the burden from explicit coding to curating prompts, from debugging logic to interpreting the whims of a language model. It is a trade, not an elimination, of complexity. The system will not solve robotic behavior, but rather relocate the points of friction, demanding new forms of expertise in prompt engineering and AI-driven debugging.
The true test will not be initial performance gains, but the system’s resilience as behaviors scale and environments become more ambiguous. Each optimization, each automated planning step, is a prophecy of the edge cases it will eventually stumble upon. The ease of creation will inevitably lead to more complex trees, demanding even more sophisticated assistance-a cycle of increasing dependence.
The field now faces a choice: pursue ever-more-elaborate tools for managing complexity, or embrace architectures that tolerate it. Order, after all, is merely a temporary cache between failures. The longevity of any such system will depend not on its initial elegance, but on its ability to gracefully degrade, to offer legible pathways through inevitable chaos.
Original article: https://arxiv.org/pdf/2602.09772.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-02-12 04:10