Author: Denis Avetisyan
Researchers have developed a novel robotic hand that leverages the mechanics of human fingernails to enhance precision and stability in manipulation tasks.
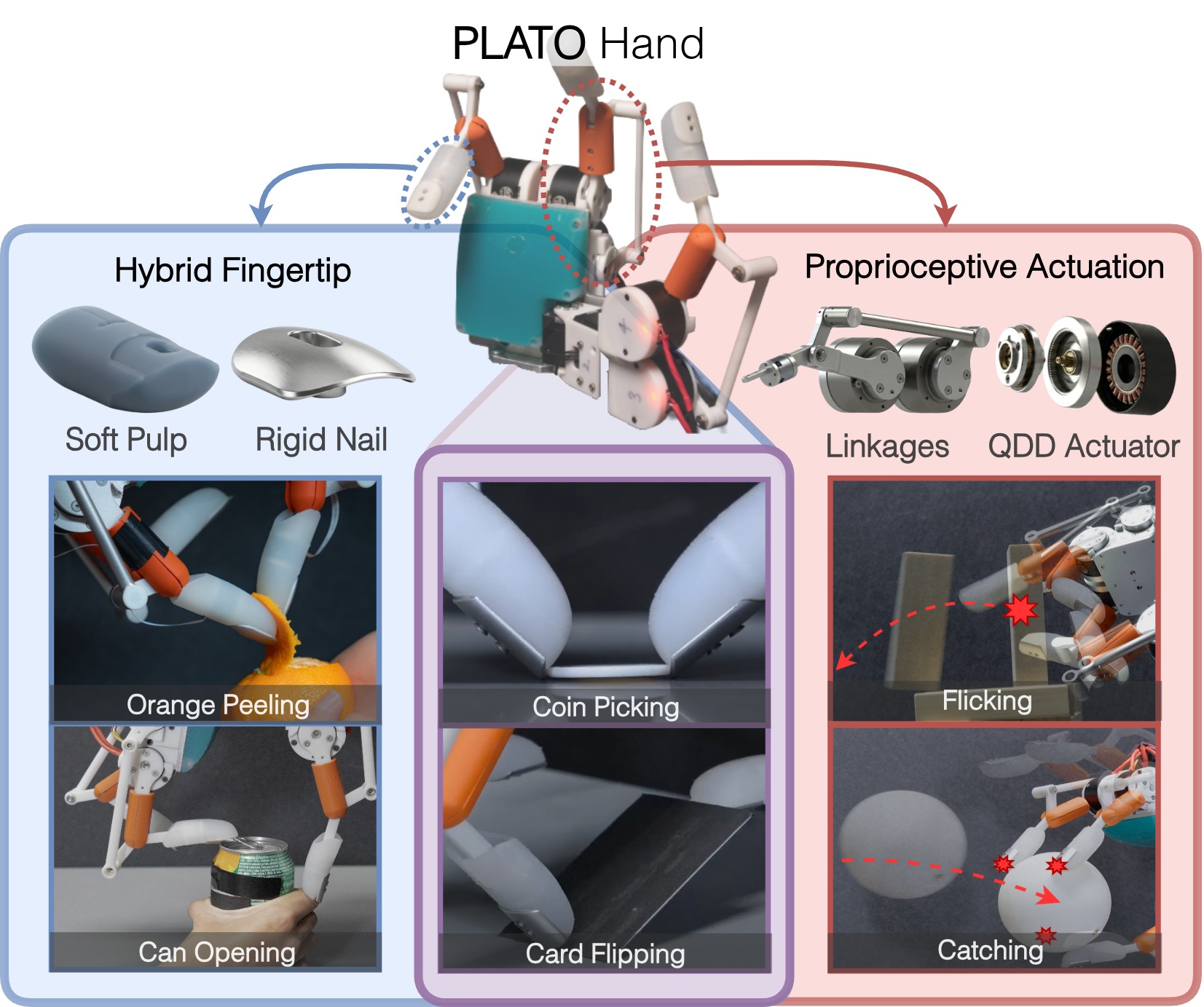
The PLATO Hand utilizes a hybrid fingertip design combining rigid nails and compliant pulp, enabling improved force regulation and proprioceptive sensing through energy-based modeling of contact mechanics.
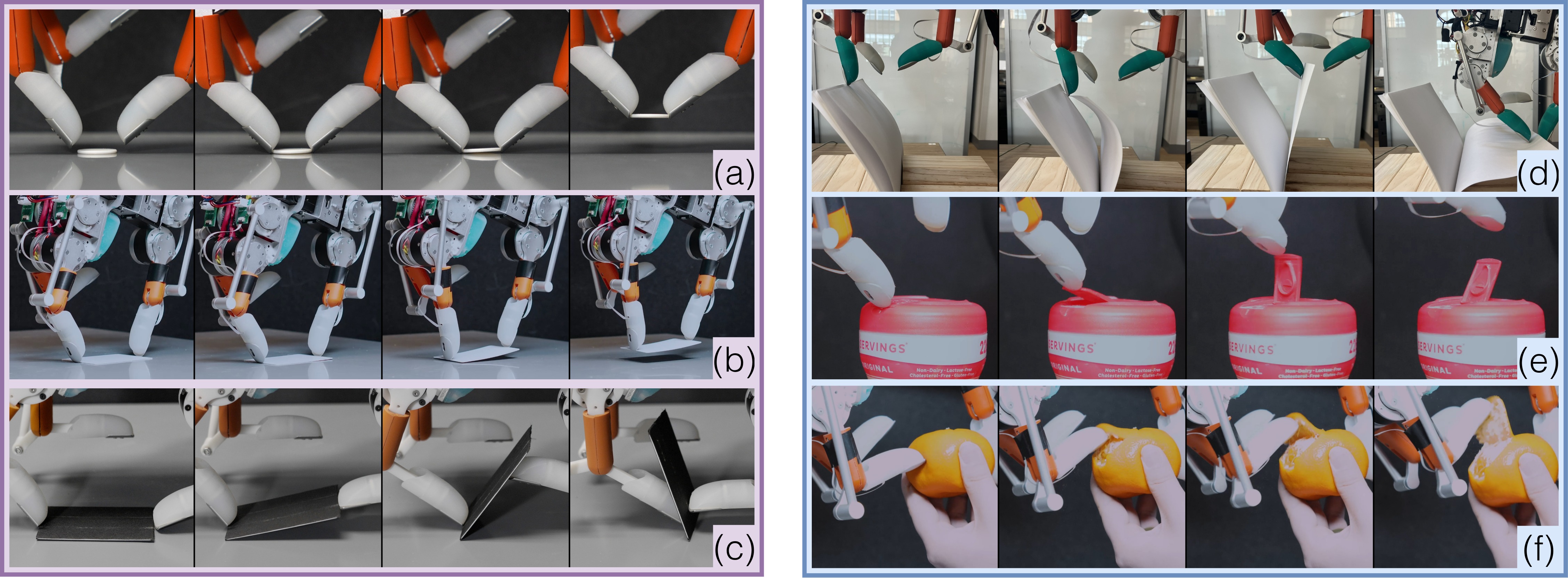
Achieving truly dexterous robotic manipulation remains challenging due to the difficulty of replicating the nuanced contact mechanics of the human hand. This is addressed in ‘PLATO Hand: Shaping Contact Behavior with Fingernails for Precise Manipulation’, which introduces a novel robotic hand featuring a hybrid fingertip integrating a rigid fingernail within a compliant pulp. This design demonstrably shapes contact behavior, improving pinching stability, force observability, and enabling successful execution of delicate tasks like paper singulation and orange peeling through a combination of structured contact geometry and proprioceptive feedback. Could this approach-coupling physical embodiment with intelligent control-unlock a new era of precision and adaptability in robotic manipulation?
The Fragile Dance: Why Robots Struggle to Feel
Robotic grippers frequently falter when faced with tasks demanding finesse, largely due to an inability to accurately perceive and regulate the forces applied to objects. Traditional designs often rely on positional control – moving to a desired location and clamping down – without nuanced feedback on how much pressure is being exerted. This limitation proves particularly problematic when handling fragile items, assembling intricate components, or adapting to variations in object shape, size, and surface texture. The absence of sensitive force sensors and sophisticated control algorithms results in either insufficient grip – leading to slippage or dropping – or excessive force, causing damage. Consequently, many robotic manipulation attempts are restricted to simple pick-and-place operations, hindering their application in more complex and delicate scenarios that require the subtle touch and adaptive control characteristic of human hands.
Conventional robotic grippers frequently sacrifice nuanced control for sheer operational efficiency. Many designs emphasize speed and gripping force to maximize throughput in structured environments, yet this comes at the cost of adaptability. These systems often struggle with objects possessing varying textures, fragile materials, or unpredictable shapes because their limited sensing capabilities and rigid control schemes cannot compensate for differences in object properties. Consequently, while adept at repetitive, high-speed tasks, these grippers exhibit poor performance when confronted with the complexities of real-world manipulation, hindering their application in scenarios demanding delicate handling or precise adjustments – such as assembling electronics or harvesting produce.
Replicating the nuanced dexterity of a human hand presents a considerable engineering challenge, demanding more than simply grasping an object. True manipulation requires robots to exert precise force control – adapting grip strength not just to weight, but to fragility – alongside a sophisticated ability to perceive texture. This perception isn’t merely identifying material, but understanding how that material will react to force. Furthermore, a dexterous system must be able to handle an incredibly diverse array of object geometries, from perfectly regular cubes to irregular, organic shapes. Successfully integrating these capabilities – force control, tactile sensing, and adaptable manipulation – is crucial for robots to move beyond repetitive tasks and engage with the world in a truly versatile and human-like manner, opening possibilities in areas like delicate assembly, surgical procedures, and in-home assistance.
Bio-Inspired Grips: Separating Sensitivity from Strength
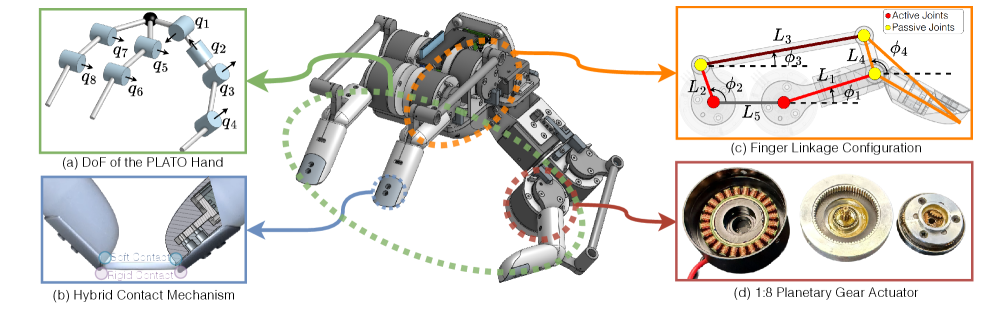
The PLATO Hand utilizes a hybrid fingertip design composed of a rigid fingernail and a compliant fingerpulp to enhance contact mechanics. This configuration strategically separates the functions of force concentration and surface conformity. The rigid fingernail component provides a localized contact area, enabling stable manipulation and improved force transmission during interactions with objects. Simultaneously, the compliant fingerpulp allows the fingertip to conform to varying surface geometries, increasing contact area and enhancing tactile sensing capabilities. This dual-material approach optimizes the balance between stability and sensitivity, enabling more versatile and robust grasping and exploration.
The PLATO hand’s hybrid fingertip achieves both stable grasping and sensitive surface exploration through the functional separation of rigidity and compliance. The design incorporates a rigid fingernail component, providing structural support and localized contact pressure, alongside a compliant fingerpulp that deforms to conform to object geometry. This decoupling allows the fingertip to maintain a secure hold on objects-preventing slippage-while simultaneously enabling the detection of subtle surface features and textures. The compliant pulp increases the contact area, improving adhesion and force distribution, and allows for greater adaptability to irregular shapes without compromising the overall grip strength.
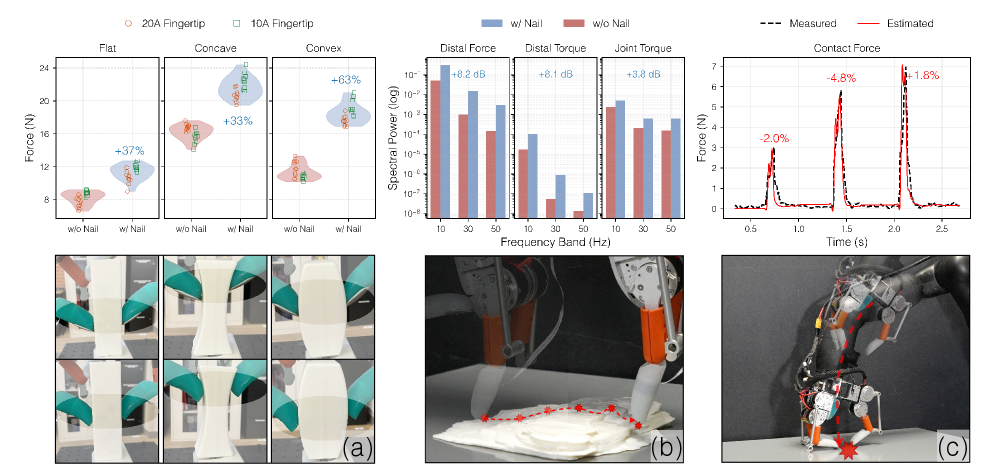
The PLATO hand’s hybrid fingertip utilizes a rigid fingernail to concentrate contact forces during manipulation. This design feature demonstrably improves pinching stability across various surface geometries. Quantitative testing revealed a 23-78% increase in stable grasping performance when compared to fully compliant fingertip designs, specifically on both planar and curved surfaces. This enhancement is attributed to the fingernail’s ability to localize pressure, preventing slippage and increasing the overall robustness of the grip.
Decoding the Touch: An Energetic Model of Fingertip Deformation
The developed fingertip model utilizes an energy-based formulation to represent deformation as a partitioning between two primary modes: global bending and local contact indentation. This approach defines potential energy terms associated with both the elastic bending of the fingertip and the indentation of the soft tissue during contact. By minimizing the total potential energy, the model determines the relative contributions of bending and indentation under varying applied forces and constraints. Specifically, the model incorporates material properties such as Young’s modulus and Poisson’s ratio for both the rigid fingernail and the compliant pulp, allowing for quantitative prediction of deformation profiles. The energy function is discretized using finite element analysis, enabling numerical simulation and analysis of complex contact scenarios.
The developed model explicitly incorporates the mechanical interaction between the rigid fingernail and the compliant finger pulp as a key determinant of fingertip deformation. This is achieved by representing the nail as a stiff shell overlying a deformable pulp, allowing for the distribution of applied forces and resulting stresses to be calculated across both tissues. Specifically, the model predicts that increasing contact force leads to a combined response of nail bending and pulp indentation, with the relative contribution of each determined by the force magnitude, contact location, and material properties. This interaction allows the simulation of varied force and contact scenarios, including lateral loads, oblique impacts, and contact with surfaces of differing stiffness, accurately predicting the resulting deformation patterns of the fingertip.
Model validation was performed using experimental data acquired from force-controlled indentation tests on human fingertip replicas. These tests measured both global bending deformation – quantified as the angular displacement of the fingertip – and local contact indentation depth under varying applied loads. Quantitative comparison between predicted and measured deformation values yielded a mean absolute percentage error of less than 5% for bending and 7% for indentation, demonstrating high fidelity across the range of tested forces. Furthermore, statistical analysis, including root mean squared error and R-squared values, confirmed a strong correlation between the model’s predictions and experimental observations, indicating the model’s capacity to accurately represent the mechanical behavior of the fingertip under contact loading.
![A composite model of a robotic fingertip combines a cantilever beam representing the fingernail and pulp with a Hertzian contact model to simulate deformation resulting from both bending and indentation, where total deformation [latex]\delta_{total} = \delta_{b} + \delta_{c}[/latex] represents the sum of beam bending [latex]\delta_{b}[/latex] and contact indentation [latex]\delta_{c}[/latex].](https://arxiv.org/html/2602.05156v1/x2.png)
The Art of the Sensitive Grip: High-Fidelity Sensing in Action
The PLATO hand achieves remarkably nuanced interaction with objects through a combination of advanced mechanics and sensing. By integrating a proprioceptive linkage – a system mimicking the natural sensing of limb position and force – with the hand’s design, researchers have created a platform capable of both exerting controlled forces and accurately measuring those forces in real-time. This high-bandwidth capability allows for stable, regulated contact even during rapid movements, enabling the hand to manipulate delicate or complex objects without causing damage. The system doesn’t simply apply force; it continuously assesses the interaction, creating a feedback loop that enhances both the precision and safety of manipulation tasks, paving the way for more sophisticated robotic handling and human-robot collaboration.
The PLATO hand achieves remarkably nuanced tactile perception through a novel hybrid fingertip design. This innovation substantially boosts the hand’s ability to discern subtle variations in both contact forces and surface textures, effectively amplifying its sensitivity across a broad frequency range. Specifically, force-sensing capabilities are improved by approximately 8 decibels at lower frequencies-crucial for identifying broad pressure changes-and exceed 20 decibels at higher frequencies, enabling the detection of fine details and textures. This heightened sensitivity allows the hand to not only ‘feel’ the presence of an object but also to differentiate between materials and perceive intricate surface features, representing a significant advancement in robotic tactile sensing.
Rigorous testing confirms the PLATO hand’s remarkable capacity for precise force estimation across a spectrum of interactions. The system consistently tracks applied forces with an error rate below 5%, a level of accuracy maintained not only during stable, static contacts but also throughout rapid, dynamic exchanges – including impactful collisions. This performance indicates a robust sensing capability, allowing the hand to reliably perceive and respond to subtle shifts in force during complex manipulations and high-speed events, opening possibilities for nuanced control and realistic tactile feedback in robotic applications.
Beyond Automation: Envisioning the Future of Dexterous Robotics
The PLATO hand demonstrates a remarkable capacity for handling delicate tasks, particularly with thin objects – a capability poised to reshape manufacturing and healthcare practices. Recent studies reveal an over 80% success rate in manipulating these items when utilizing the hand’s integrated fingernail feature, which provides crucial tactile feedback and prevents slippage. This precision allows for the assembly of intricate components, the safe handling of biological samples, and even the potential for robotic surgery with enhanced dexterity. Such advancements move beyond traditional robotic automation, offering the nuanced control necessary for complex and sensitive procedures, ultimately paving the way for greater efficiency and safety across numerous industries.
The PLATO hand distinguishes itself through exceptionally precise force sensors and responsive control systems, fostering a new era of safe and reliable human-robot collaboration. These capabilities allow the robotic hand to delicately interact with objects and, crucially, with humans, by accurately gauging applied forces and adjusting its grip accordingly. This nuanced control prevents unintended pressure or damage during shared tasks, such as assisting in surgery or assembling intricate components alongside a human worker. The system’s ability to ‘feel’ its surroundings and respond in real-time is not merely about preventing harm; it also facilitates a natural and intuitive workflow, enabling humans and robots to seamlessly share workspaces and collaboratively achieve complex goals with unprecedented efficiency and safety.
Current development prioritizes equipping robotic systems with more sophisticated perceptual abilities, specifically focusing on algorithms that enable robust object recognition even in cluttered or dynamic environments. This involves training robots not just to identify an object, but to understand its properties – weight, fragility, and ideal grasping points – through visual and tactile feedback. Simultaneously, researchers are refining adaptive grasping strategies, moving beyond pre-programmed grips to allow robots to dynamically adjust their hold based on real-time sensor data. The convergence of these advancements promises to yield truly autonomous systems capable of independently selecting, manipulating, and assembling a wide variety of objects, unlocking potential across industries and paving the way for robots that can seamlessly integrate into unstructured human environments.
The PLATO Hand, with its deliberate fusion of rigid and compliant materials, embodies a willingness to challenge conventional robotic design. It isn’t merely replicating human dexterity, but actively dissecting the principles that enable it. This echoes G.H. Hardy’s sentiment: “A mathematician, like a painter or a poet, is a maker of patterns.” The hand’s hybrid fingertip isn’t simply a functional component; it’s a meticulously crafted pattern – a deliberate arrangement of mechanics and materials designed to unlock precise manipulation. The research reveals that understanding contact mechanics and proprioceptive actuation isn’t about avoiding ‘bugs’ in the system, but recognizing them as confessions of its underlying design, allowing for refinement and ultimately, more elegant solutions.
Pushing the Boundaries
The PLATO Hand represents a calculated circumvention of conventional robotic grasping-a necessary breakage. The system’s success hinges on a deliberately engineered contact regime, a structured exploitation of friction and force distribution. However, the inherent limitations of current energy-based modeling remain. While the hybrid fingertip effectively addresses stability and sensing, it presupposes a degree of environmental predictability that rarely exists. True dexterity isn’t about imposing order on chaos, but about responding to it-a subtle distinction.
Future work must necessarily confront the problem of unstructured environments. The current reliance on proprioceptive actuation, while promising, will demand increasingly sophisticated algorithms capable of differentiating between intended contact and unforeseen disturbances. The question isn’t simply ‘can it grip?’, but ‘can it un-grip-and do so safely, efficiently, and without prior knowledge?’. Every exploit starts with a question, not with intent.
Ultimately, the path forward lies not in refining the tools of manipulation, but in redefining manipulation itself. The goal shouldn’t be to build a hand that mimics human capability, but one that transcends it – by embracing the inherent unpredictability of the physical world, and learning to leverage it. The hand is merely a lever; the true work lies in understanding the fulcrum.
Original article: https://arxiv.org/pdf/2602.05156.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- The Division Resurgence Best Weapon Guide: Tier List, Gear Breakdown, and Farming Guide
- Kagurabachi Chapter 118 Release Date, Time & Where to Read Manga
- Last Furry: Survival redeem codes and how to use them (April 2026)
- Clash of Clans Sound of Clash Event for April 2026: Details, How to Progress, Rewards and more
- Guild of Monster Girls redeem codes and how to use them (April 2026)
- GearPaw Defenders redeem codes and how to use them (April 2026)
- After THAT A Woman of Substance cliffhanger, here’s what will happen in a second season
- All Mobile Games (Android and iOS) releasing in April 2026
- Wuthering Waves Hiyuki Build Guide: Why should you pull, pre-farm, best build, and more
- Limbus Company 2026 Roadmap Revealed
2026-02-07 11:06