Author: Denis Avetisyan
A new framework optimizes task allocation and communication for multi-robot systems operating in unpredictable and communication-constrained settings.
This review details CoCoPlan, an adaptive coordination and communication system leveraging temporal planning and branch-and-bound techniques for robust multi-agent operation.
While multi-robot systems promise enhanced efficiency through collaboration, achieving effective coordination is hampered by the reality of limited and intermittent communication. This paper introduces CoCoPlan: Adaptive Coordination and Communication for Multi-robot Systems in Dynamic and Unknown Environments, a unified framework that simultaneously optimizes task allocation and communication scheduling to overcome these challenges. By integrating adaptive objective functions with a branch-and-bound architecture, CoCoPlan demonstrably improves task completion rates and reduces communication overhead-even scaling to large teams in dynamic environments. Could this approach unlock truly robust and scalable multi-robot collaboration in complex, real-world scenarios?
The Fragility of Coordination: A System Under Stress
Effective collaboration among multiple agents – be they robots, software programs, or autonomous vehicles – demands sophisticated coordination, particularly when operating within unpredictable environments. However, conventional strategies often prove inflexible, relying on pre-programmed communication schedules or centralized leadership that cannot readily adjust to unforeseen obstacles or shifting priorities. This inherent rigidity stems from an inability to dynamically reassess and optimize coordination plans in real-time, hindering performance when agents encounter novel situations or require swift adaptation to changing demands. Consequently, systems built on these foundations struggle to maintain efficiency and resilience in complex, real-world scenarios where adaptability is paramount for successful task completion and sustained operation.
Traditional multi-agent communication strategies, reliant on predetermined structures like fixed communication nodes or centralized leadership, often prove inadequate when confronted with real-world complexity. These systems struggle because they lack the flexibility to adjust to unforeseen obstacles or shifting task demands; a static communication schedule cannot efficiently reroute information around a newly appeared obstruction, nor can a leader-based approach swiftly re-prioritize assignments when circumstances change. This inflexibility results in communication bottlenecks, delayed responses, and ultimately, diminished performance in dynamic environments where adaptability is paramount. The inherent brittleness of these static methods highlights the need for coordination mechanisms that can proactively adapt communication and task allocation in response to evolving conditions.
The inflexibility of current multi-agent coordination methods presents a significant challenge when applied to real-world applications. Systems reliant on pre-defined communication or rigid task allocation struggle to maintain performance as environments change and unexpected obstacles arise. This is particularly evident in scenarios like search and rescue operations, disaster response, or complex logistical networks where dynamic adaptation is paramount. A lack of resilience not only reduces the efficiency of task completion but can also lead to critical failures, jeopardizing objectives and potentially increasing risks. Consequently, the inability to effectively coordinate in dynamic conditions severely limits the practical deployment of multi-agent systems, necessitating innovative approaches that prioritize adaptability and robustness.
The limitations of current multi-agent coordination strategies necessitate a shift towards dynamic, online approaches. Existing systems often treat task planning and communication as separate entities, resulting in inefficiencies when faced with unpredictable environments. A novel paradigm integrates these two crucial aspects, allowing agents to simultaneously optimize what tasks are performed and how they communicate to achieve those tasks. This integration enables agents to adapt in real-time to unforeseen obstacles, shifting priorities, and the actions of other agents, fostering a more resilient and effective system. By treating communication not merely as a means of relaying information, but as an integral component of the overall task-solving process, agents can dynamically adjust communication schedules to minimize latency and maximize information transfer, ultimately leading to improved performance and robustness in complex scenarios.
CoCoPlan: Rewriting the Rules of Engagement
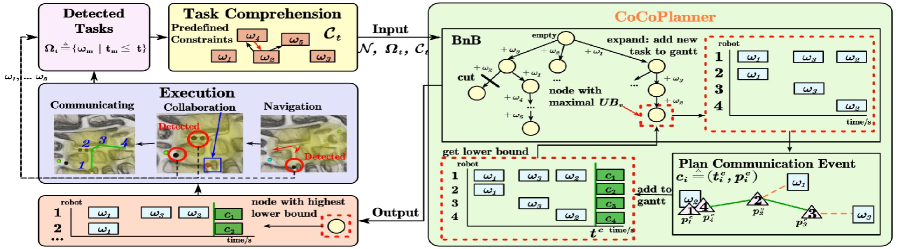
CoCoPlan is a coordination framework designed for dynamic, real-time operation, differing from traditional approaches that often pre-compute plans offline. It achieves coordination by concurrently optimizing both task allocation – determining which agent performs which task – and team-wise communication schedules. This simultaneous optimization is critical, as effective communication is integrated directly into the planning process, allowing agents to share information relevant to task success. The framework’s ‘online’ capability means it continuously re-evaluates and adjusts plans and communication based on incoming data, enabling adaptation to changing circumstances during execution without requiring complete replanning from a static initial state.
CoCoPlan utilizes a Branch-and-Bound search algorithm to efficiently identify optimal task allocations within a multi-agent system. This algorithm systematically explores possible task assignments, pruning branches that are demonstrably suboptimal based on a defined cost function. The key to CoCoPlan’s adaptability lies in its Adaptive Objective Function, which dynamically adjusts the criteria used to evaluate task allocations. This function considers factors such as task dependencies, agent capabilities, and current environmental conditions to prioritize solutions that maximize overall team performance. By iteratively refining the search space and dynamically weighting these factors, CoCoPlan can efficiently converge on near-optimal task assignments even in complex and changing environments.
CoCoPlan facilitates dynamic plan and communication adjustments by continuously integrating real-time data concerning task progress and environmental conditions. Agents utilize incoming information to re-evaluate existing task allocations and communication schedules, triggering modifications as needed to maintain optimal performance. This reactive capability extends beyond simple error recovery; the system proactively adapts to changing circumstances, such as newly available resources, altered task priorities, or unexpected obstacles, by re-planning and re-communicating to ensure continued coordinated action. The framework’s adaptability is achieved through the iterative refinement of plans and communication, driven by the Adaptive Objective Function and the Branch-and-Bound search algorithm, which allows for efficient evaluation of alternative coordination strategies.
CoCoPlan distinguishes itself through its capacity for online execution, meaning it operates continuously and adapts in real-time without requiring complete replanning from scratch. This is achieved by monitoring the environment for deviations from the expected state and triggering localized adjustments to task allocations and communication schedules. When unforeseen circumstances – such as task failures, resource unavailability, or changing priorities – occur, CoCoPlan dynamically re-evaluates the current plan and generates revised actions. This reactive capability minimizes disruptions and maintains robust performance by allowing the system to recover from unexpected events and continue operating effectively in dynamic and uncertain environments.
The Pulse of Coordination: Team-Wise Intermittent Communication
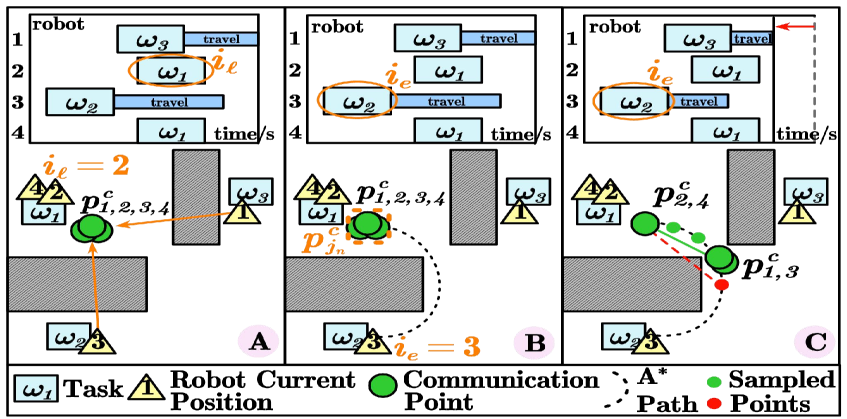
Team-wise Intermittent Communication in CoCoPlan involves periodic synchronization events between agents to facilitate information exchange and coordinated replanning. Rather than continuous communication, agents operate independently for defined intervals, then converge to share task progress, observed environmental data, and updated plans. This synchronization isn’t rigidly timed; the system dynamically adjusts communication frequency based on task demands and environmental changes. The core principle is to reduce communication bandwidth by only exchanging essential information when it demonstrably contributes to improved team performance and overall task completion.
Communication Events, generated through the Team-wise Intermittent Communication protocol, serve as the foundational data for constructing a Communication Graph. This graph visually represents the connectivity and information flow between agents within the multi-agent system. Each Communication Event, detailing the exchange of task assignments, observations, or replanning requests, is recorded as an edge in the graph, connecting the communicating agents as nodes. The resulting Communication Graph allows for analysis of agent interactions, identification of critical communication pathways, and assessment of the overall robustness of the collaborative system. This dynamic graph is not static; it evolves with each Communication Event, reflecting the changing needs and progress of the team throughout the execution of tasks.
CoCoPlan employs a dynamic communication strategy that optimizes the balance between information sharing and communication costs. Rather than fixed intervals or exhaustive data transfers, the system adjusts both the frequency and content of communication events based on observed task progress and agent states. Office-based experiments demonstrated the efficiency of this approach, resulting in an average of only 5 communication events during task execution. This minimized overhead is achieved while still enabling effective coordination and task allocation among agents, contributing to the overall system performance.
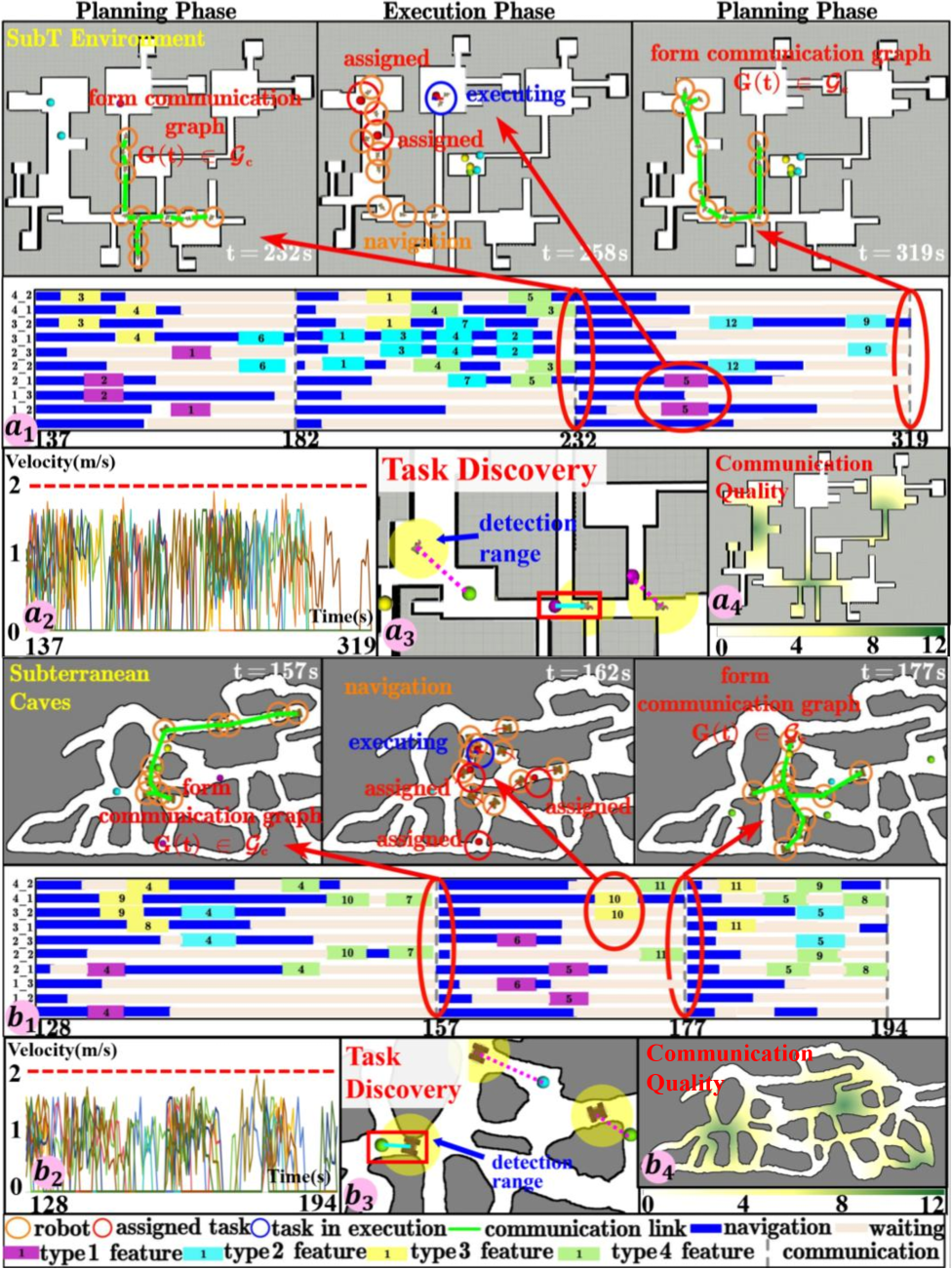
Evaluations of the CoCoPlan system demonstrate a significant performance advantage over both static communication strategies and simpler algorithms, such as the Greedy Algorithm. Specifically, CoCoPlan achieved a task completion rate of 99.0% within the Subterranean Technology (SubT) environment and 98.7% in subterranean cave environments. These results indicate a substantial improvement in task success when utilizing the dynamic, intermittent communication approach employed by CoCoPlan, compared to methods with fixed communication schedules or those prioritizing immediate, localized gains.
![Hardware experiments utilized ad-hoc local communication devices [image left] guided by a predicted communication quality map [image right] to coordinate communication events.](https://arxiv.org/html/2601.10116v1/x3.png)
Beyond Simulation: Validating Resilience in the Real World
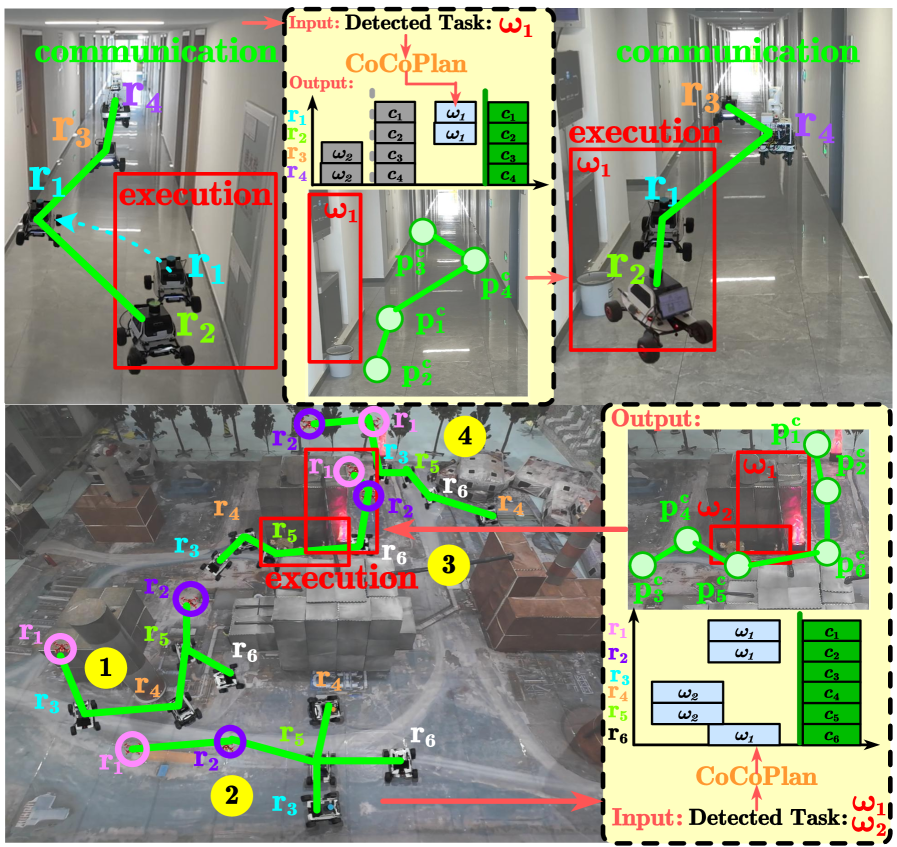
The CoCoPlan framework’s robustness has been rigorously assessed through deployment in a variety of demanding real-world simulations and physical environments. Testing spanned the intricacies of fully rendered 3D urban landscapes, the complete darkness and confined spaces of subterranean cave systems, and the particularly challenging conditions presented by the DARPA Subterranean Challenge (SubT) competition. This diverse testing suite was crucial for validating the framework’s adaptability; each environment demanded unique navigational strategies and sensor interpretations, forcing CoCoPlan to demonstrate its capacity to perform effectively beyond controlled laboratory settings. The ability to function seamlessly across such varied locales underscores the framework’s potential for broad application and reliable performance in unpredictable situations.
CoCoPlan distinguishes itself through its capacity to orchestrate collaborative missions involving both Unmanned Aerial Vehicles (UAVs) and Unmanned Ground Vehicles (UGVs) within intricate and unpredictable environments. This isn’t simply about deploying multiple robot types; the framework actively manages their interplay, assigning tasks based on each vehicle’s strengths and the specific challenges of the terrain. For instance, UAVs can provide aerial reconnaissance and mapping of a 3D urban environment or subterranean cave, while UGVs navigate ground-level obstacles and conduct detailed inspections. This synergistic approach allows for more comprehensive data collection and faster task completion compared to relying on a single robot type, proving particularly valuable in scenarios demanding adaptability and resilience where environments present unpredictable conditions or limited visibility.
Rigorous testing reveals that CoCoPlan consistently outperforms existing methods in challenging environments, demonstrating a marked improvement in task completion, operational efficiency, and system resilience. Quantitative analysis indicates a task completion efficiency of 0.173 ± 0.005 within the demanding DARPA Subterranean Challenge (SubT) environment and a comparable efficiency of 0.176 ± 0.006 in complex subterranean cave systems. These figures represent a significant advancement, highlighting CoCoPlan’s capacity to effectively coordinate robotic teams and maintain reliable performance even amidst the uncertainties and limitations inherent in real-world operations. This enhanced capability translates directly into improved outcomes for applications requiring autonomous navigation and task execution in difficult-to-access or hazardous locations.
The successful coordination of robotic teams within challenging environments translates directly into practical applications poised to benefit from increased efficiency and safety. Demonstrating this potential, the CoCoPlan framework has facilitated the completion of 160 distinct tasks utilizing a fleet of 100 robots, showcasing its scalability and robustness. This performance underscores the system’s viability for deployment in critical scenarios such as search and rescue operations, where rapid and reliable navigation is paramount, and infrastructure inspection, where automated assessments can identify potential hazards. Furthermore, the framework offers a powerful tool for environmental monitoring, enabling data collection in areas inaccessible or dangerous for human researchers, ultimately contributing to more informed decision-making and proactive interventions.
The pursuit of robust multi-robot coordination, as detailed in this framework, inherently demands a willingness to challenge established assumptions. It’s a system built not on rigid adherence to pre-defined plans, but on the capacity to adapt and re-evaluate in the face of uncertainty. This resonates with Brian Kernighan’s observation: “Debugging is twice as hard as writing the code in the first place. Therefore, if you write the code as cleverly as possible, you are, by definition, not smart enough to debug it.” The CoCoPlan approach, by simultaneously optimizing task allocation and communication – even with intermittent connections – mirrors this sentiment. It acknowledges the inevitable ‘debugging’ inherent in dynamic environments and designs a system capable of self-correction, continually testing and refining its strategies to navigate the complexities of unknown spaces.
What Breaks Down Next?
The CoCoPlan framework establishes a functional, if predictably optimized, equilibrium. But what happens when the very definition of ‘task’ becomes fluid? Current implementations assume a relatively static task library. The true test lies in environments where goals emerge and dissolve mid-operation, requiring not just re-allocation, but a continuous renegotiation of purpose. Extending the branch-and-bound search to accommodate evolving objectives, rather than simply rescheduling pre-defined ones, will expose the limitations of current computational tractability. One anticipates a swift collision with the combinatorial explosion, of course – a useful data point.
Furthermore, the system presently treats communication as a resource to be managed. What if communication itself becomes unreliable in novel ways – not simply intermittent, but actively deceptive? Introducing adversarial communication models-agents deliberately misreporting states or intentions-would force a shift from optimization to robustification. Can a coordinated system survive when it cannot trust the information upon which its decisions are based? The answer, predictably, will reveal more about the assumptions embedded within the coordination mechanism than about the robots themselves.
Ultimately, CoCoPlan, like any successful framework, defines the boundaries of a solvable problem. The interesting questions lie just beyond those boundaries – in the messy, unpredictable realities where robots must operate not as optimized agents, but as improvisers, constantly rebuilding their understanding of the world – and each other – from the ground up.
Original article: https://arxiv.org/pdf/2601.10116.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Clash Royale Best Boss Bandit Champion decks
- Vampire’s Fall 2 redeem codes and how to use them (June 2025)
- World Eternal Online promo codes and how to use them (September 2025)
- How to find the Roaming Oak Tree in Heartopia
- Best Arena 9 Decks in Clast Royale
- Mobile Legends January 2026 Leaks: Upcoming new skins, heroes, events and more
- ATHENA: Blood Twins Hero Tier List
- Brawl Stars December 2025 Brawl Talk: Two New Brawlers, Buffie, Vault, New Skins, Game Modes, and more
- Clash Royale Furnace Evolution best decks guide
- How To Watch Tell Me Lies Season 3 Online And Stream The Hit Hulu Drama From Anywhere
2026-01-16 14:19