Author: Denis Avetisyan
This review details a new approach to collision avoidance that allows multiple independent swarms to safely and effectively cover an area, even with limited and uncertain environmental measurements.
A novel methodology for non-cooperative multi-swarm coverage control addresses disturbance uncertainty using Voronoi tessellation and reciprocal velocity obstacles.
Maintaining coordinated multi-agent systems is challenging when agents operate independently amidst environmental uncertainty. This is addressed in ‘Collision Avoidance for Non-Cooperative Multi-Swarm Coverage Control with Bounded Disturbance Measurements’, which introduces a novel methodology for ensuring collision-free operation across multiple, non-cooperative swarms tasked with area coverage. The proposed approach explicitly accounts for bounded uncertainties in disturbance measurements, enabling robust and effective path planning. Could this framework unlock more resilient and scalable swarm robotics applications in complex, real-world scenarios?
The Inevitable Chaos of Multi-Agent Systems
The effective deployment of multi-agent systems, often composed of unmanned aerial vehicles (UAVs) and unmanned underwater vehicles (AUVs), fundamentally relies on sophisticated coordination strategies. These systems aren’t simply collections of independent robots; their true potential is unlocked when agents work in concert to achieve a shared objective. This necessitates algorithms that go beyond individual task execution, addressing how agents distribute work, share information, and resolve conflicts. Successful completion of complex tasks – such as environmental monitoring, search and rescue, or collaborative construction – demands a coordinated approach, where each agent’s actions are informed by and contribute to the overall mission, rather than operating in isolation. The challenge lies in creating systems that can adapt to changing conditions and maintain cohesive operation despite the inherent complexities of real-world environments.
Conventional coordination algorithms often falter when applied to real-world scenarios due to the unpredictable nature of dynamic environments and the limitations of robotic perception. These methods typically rely on precise models and complete information, assumptions rarely met when operating in complex spaces with moving obstacles or imperfect sensors. Inherent uncertainty in both sensing-where robots may misjudge distances or object identities-and actuation-where motor commands don’t always translate to intended movements-compounds these issues. Consequently, traditional approaches struggle to adapt to unforeseen changes, leading to inefficient task execution, potential collisions, and a general lack of robustness; a departure from pre-programmed behaviors is frequently necessary, highlighting the need for more flexible and reactive coordination strategies.
The practical deployment of multi-agent systems necessitates more than just individual agent capabilities; reliable collision avoidance and efficient coverage control are paramount to operational success. These systems, often operating in complex and unpredictable environments, must dynamically adapt to external disturbances – wind gusts for aerial vehicles, or ocean currents for underwater systems – without compromising task completion. Sophisticated algorithms are required not only to predict potential collisions between agents, but also to proactively adjust trajectories and maintain optimal spatial distribution for comprehensive area coverage. This demands a continuous feedback loop integrating sensor data, predictive modeling, and responsive control mechanisms, ensuring robustness and preventing system failure in the face of real-world uncertainties.
Dividing the Spoils: Voronoi Tessellations for Coverage
Effective coverage control necessitates the division of an operational area into discrete regions, and Voronoi tessellations offer a mathematically defined method for achieving this partitioning. A Voronoi diagram divides space based on proximity to a set of points – the ‘sites’ or agents – assigning each location to the nearest site. This results in a set of polygons, known as Voronoi cells, each uniquely associated with a single agent. Consequently, each agent is responsible for coverage within its defined cell, eliminating overlap and ensuring complete spatial coverage of the operating environment. The boundaries of these cells are equidistant to the agent and its neighbors, simplifying coverage assessment and task allocation.
A Centroidal Voronoi Configuration (CVC) optimizes agent placement by minimizing the difference between each cell’s geometric centroid and the position of its assigned agent. This configuration aims to equalize cell volumes and reduce overlap, maximizing coverage efficiency. Implementation details demonstrate a convergence rate of 0.001% in Voronoi cell volume – indicating that further iterations yield negligible improvements – achieved consistently within 5 seconds of computation. This rapid convergence is critical for real-time applications requiring dynamic adjustments to coverage patterns, as the CVC quickly establishes a stable and effective partitioning of the operational space.
Lloyd’s Iterative Algorithm, also known as the relaxation or Weiszfeld algorithm, is an iterative process used to refine a set of generator points within a Voronoi tessellation. The algorithm operates by repeatedly replacing each generator point with the centroid of the region – defined by the Voronoi cell – associated with that point. This process is computationally efficient due to its localized calculations; each update requires only the determination of a cell’s centroid. Importantly, the algorithm’s adaptability stems from its ability to converge towards a stable configuration even with dynamic changes to the environment or the addition/removal of generator points, allowing for real-time adjustments to coverage based on evolving needs. Convergence is typically achieved within a few iterations, making it suitable for applications requiring rapid adaptation.
Predictable Paths: Velocity Obstacles and Optimal Reciprocal Control
Velocity Obstacles (VO) represent a fundamental technique in collision avoidance, operating by determining velocity ranges that will not result in collisions between agents. For each agent, VO calculates a set of velocities that, if executed, would lead to a potential collision with other agents within a defined timeframe. These collision-inducing velocities are then represented as “obstacles” in the agent’s velocity space. Consequently, the agent selects a velocity outside of these obstacles, ensuring a safe trajectory. The core principle involves projecting the possible future positions of both the ego agent and other agents, and identifying velocities for the ego agent that avoid overlap with the predicted positions of others. This approach allows for reactive collision avoidance, as safe velocities are recalculated continuously based on the perceived motion of surrounding agents.
Optimal Reciprocal Collision Avoidance (ORCA) builds upon the Velocity Obstacles (VO) framework by incorporating reciprocal velocity adjustments between agents. Unlike VO, which focuses solely on avoiding another agent’s velocity obstacle, ORCA considers how each agent’s avoidance maneuver impacts the other. This is achieved through a shared, optimized adjustment of velocities, minimizing the disruption to both agents’ intended paths. In dense multi-agent scenarios, this reciprocal approach results in more natural and predictable trajectories, reducing the likelihood of oscillations or deadlock situations that can occur when agents independently react to perceived threats. The resulting behavior is demonstrably more responsive and stable compared to standard VO implementations, particularly when multiple agents are in close proximity.
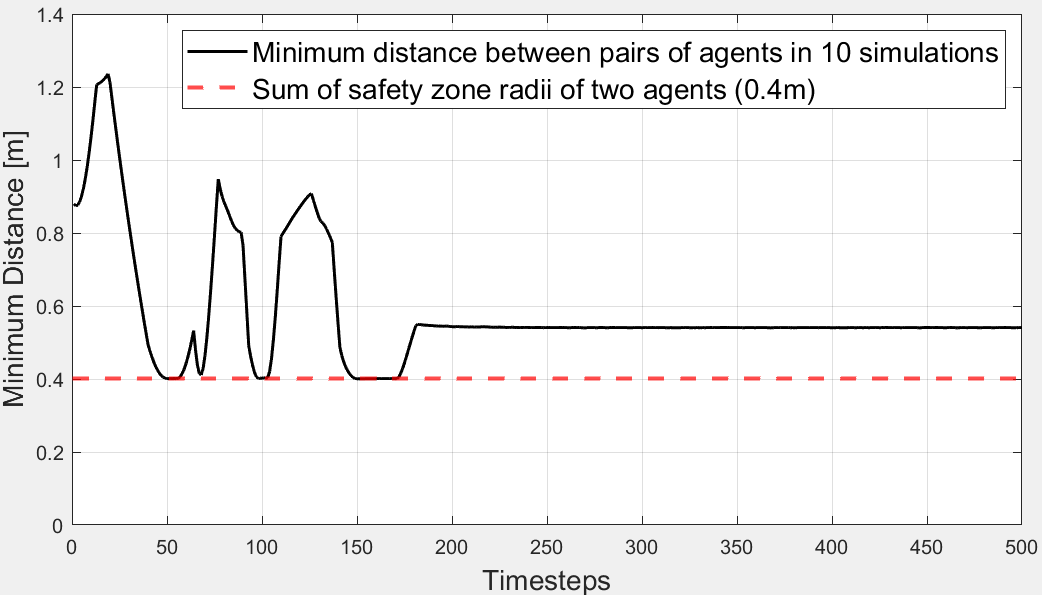
The efficacy of velocity obstacle (VO) and optimal reciprocal collision avoidance (ORCA) methods is directly contingent upon the precision of agent velocity data and accounting for external forces impacting trajectories. Our simulations consistently demonstrate a minimum separation distance of 0.4 meters maintained between agents belonging to different swarms across all tested scenarios. This minimum distance, achieved through the implementation of these collision avoidance algorithms, validates their ability to prevent collisions given accurate perceptual input and force modeling; however, performance degradation is expected with increased uncertainty in these parameters.
The Inevitable Noise: Dealing with Real-World Imperfections
The transition from controlled simulations to real-world deployment invariably introduces measurement noise in sensor data, fundamentally impacting the reliability of robotic systems. These imperfections, stemming from limitations in sensor technology and environmental factors, degrade the precision of critical functions such as collision avoidance and coverage control. Even slight inaccuracies in distance readings or object detection can lead to suboptimal paths, increased risk of collisions, or incomplete environmental mapping. Consequently, algorithms must be designed with inherent robustness to these imperfections, employing techniques like sensor fusion, filtering, and probabilistic modeling to mitigate the effects of noisy data and maintain dependable performance in unpredictable conditions.
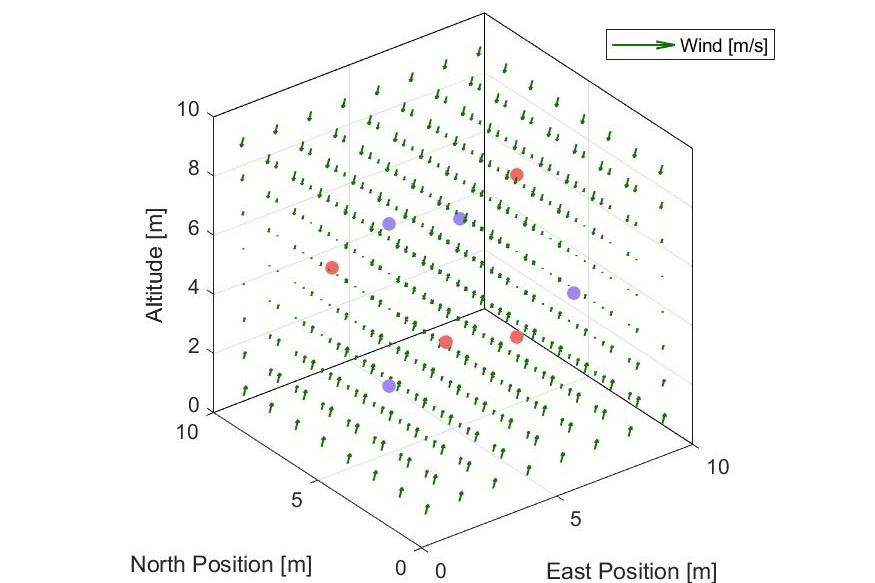
The operational environment frequently introduces unpredictable external forces that challenge the precision of multi-agent systems. Wind fields and shear wind, for example, exert forces that can deflect agents from their planned trajectories, demanding continuous adaptation. Effective navigation, therefore, isn’t simply about following a pre-determined path, but dynamically re-planning in response to these disturbances. Algorithms must incorporate strategies to estimate and counteract these forces, allowing agents to maintain formation, avoid collisions, and achieve their objectives despite the unpredictable nature of the surrounding environment. This necessitates robust control schemes capable of swiftly adjusting velocities and headings to remain on course, effectively transforming reactive responses into smooth, coordinated maneuvers.
Achieving truly robust multi-agent system performance necessitates a careful consideration of disturbance measurement uncertainty – acknowledging not only the presence of external forces like wind, but also the inherent limitations of the sensors used to perceive them. Simulations with multiple swarms have demonstrated that integrating knowledge of both the expected disturbances and the precision of sensor readings allows for significantly improved trajectory planning. This approach enables agents to proactively compensate for anticipated disruptions, resulting in demonstrably collision-free motion and locally optimal coverage even in dynamic and unpredictable environments. The success hinges on a system’s ability to move beyond simply reacting to disturbances and instead anticipating and mitigating their effects based on a quantified understanding of measurement error.
The pursuit of elegant solutions in multi-agent systems invariably encounters the harsh realities of production. This work, detailing collision avoidance within multi-swarm coverage, demonstrates yet another layer of complexity added to the promise of autonomous coordination. It’s a predictable outcome; the theoretical beauty of Voronoi tessellations and Reciprocal Velocity Obstacles will, inevitably, be stressed by bounded disturbance measurements and the unpredictable behavior of genuinely non-cooperative agents. As Isaac Newton observed, “We build too many walls and not enough bridges.” The same applies here-complex algorithms attempt to isolate agents, while the true challenge lies in facilitating robust interaction amidst uncertainty. This isn’t a failure of the method, simply confirmation that any system, no matter how cleverly designed, will ultimately grapple with the messiness of the real world.
The Road Ahead
The presented methodology, while addressing a specific facet of multi-swarm coordination, merely refines the existing problem statement. Collision avoidance, even with bounded disturbance measurements, is not a solved challenge – it’s a temporarily contained cost. The inevitable complexity of real-world deployments will introduce unforeseen interactions, sensor limitations, and communication bottlenecks. These will, predictably, degrade performance and reveal the fragility inherent in any decentralized system.
Future work will likely focus on increasingly sophisticated prediction models, attempting to anticipate the unpredictable. However, history suggests this is an exercise in diminishing returns. More accurate predictions demand more data, more processing, and ultimately, more assumptions. The field seems intent on building increasingly elaborate castles on foundations of incomplete information. It isn’t a question of if the system will fail, but where and when.
The focus should shift. The pursuit of perfect collision avoidance is a distraction. The real challenge lies not in preventing every interaction, but in designing systems that can gracefully recover from them. Perhaps the objective isn’t fewer microservices, or more accurate sensors – perhaps it’s simply accepting a controlled level of chaos. The elegance of a theoretical solution is rarely preserved when faced with the blunt force of production.
Original article: https://arxiv.org/pdf/2601.09917.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Clash Royale Best Boss Bandit Champion decks
- Vampire’s Fall 2 redeem codes and how to use them (June 2025)
- World Eternal Online promo codes and how to use them (September 2025)
- Best Arena 9 Decks in Clast Royale
- Mobile Legends January 2026 Leaks: Upcoming new skins, heroes, events and more
- Country star who vanished from the spotlight 25 years ago resurfaces with viral Jessie James Decker duet
- How to find the Roaming Oak Tree in Heartopia
- M7 Pass Event Guide: All you need to know
- Solo Leveling Season 3 release date and details: “It may continue or it may not. Personally, I really hope that it does.”
- Kingdoms of Desire turns the Three Kingdoms era into an idle RPG power fantasy, now globally available
2026-01-18 16:36