Author: Denis Avetisyan
A new evaluation of decentralized multi-robot SLAM systems reveals the critical trade-offs for autonomous mapping in challenging planetary analogue terrains.

This paper details a comprehensive dataset and analysis of a decentralized collaborative SLAM system (Swarm-SLAM) operating under communication and resource constraints in a simulated planetary environment.
Achieving robust multi-robot mapping in unexplored environments remains a significant challenge due to limitations in communication and localization infrastructure. This is addressed in ‘Multi-Robot Decentralized Collaborative SLAM in Planetary Analogue Environments: Dataset, Challenges, and Lessons Learned’, which details an evaluation of decentralized collaborative simultaneous localization and mapping (C-SLAM) performed using a three-robot system in a Mars-analog terrain. The research highlights critical trade-offs between communication bandwidth, computational load, and mapping accuracy, alongside the presentation of a novel dataset including real-time inter-robot communication metrics. How can these insights inform the development of more resilient and efficient robotic exploration strategies for future planetary missions?
The Illusion of Mapping: Why Every Map is a Lie
Conventional Simultaneous Localization and Mapping (SLAM) techniques, while effective in structured or limited spaces, often falter when confronted with the ambiguities of real-world complexity. These methods frequently rely on pre-existing maps or external sensors – such as GPS or motion capture systems – to maintain accurate positioning and build consistent environmental representations. However, in expansive and dynamic environments – think dense forests, disaster-stricken areas, or the surface of another planet – such infrastructure is often absent or unreliable. This creates a cascading effect of errors; as a robot ventures further, even minor inaccuracies in localization accumulate, leading to distorted maps and ultimately, navigational failure. The challenge isn’t simply building a map, but maintaining a consistent and accurate understanding of location while mapping, all without the benefit of fixed external references, demanding more robust and adaptable algorithms.
For robots venturing into unstructured and unpredictable environments – be it the rubble-strewn aftermath of a disaster or the desolate landscapes of another planet – pinpointing location with unwavering accuracy is not merely helpful, but fundamentally crucial. Robust localization enables a robot to build a reliable map of its surroundings, allowing it to navigate safely, identify points of interest, and effectively complete its designated tasks. Without this capability, even the most sophisticated algorithms for path planning and object recognition become meaningless, as the robot lacks the essential spatial awareness to operate autonomously. The challenge isn’t simply about knowing where the robot is, but maintaining that knowledge despite sensor noise, featureless terrain, and the absence of pre-existing maps or GPS signals, demanding increasingly resilient and adaptable localization techniques.
The inherent limitations of solitary robotic exploration necessitate a shift towards collaborative systems. Single robots, while capable, face significant constraints in both spatial coverage and operational resilience. Extensive environments demand time and energy resources that a lone unit simply cannot sustain efficiently. Furthermore, the failure of a single robot in a remote or hazardous location can halt the entire mission. Multi-robot teams, however, can distribute these burdens, achieving broader mapping capabilities and providing redundancy against individual unit failures. By sharing information and coordinating movements, these systems amplify their collective sensing range and ensure continued operation even when faced with unexpected obstacles or component malfunctions, ultimately proving more effective in charting and understanding unknown territories.
Swarm-SLAM: Distributing the Inevitable Failure
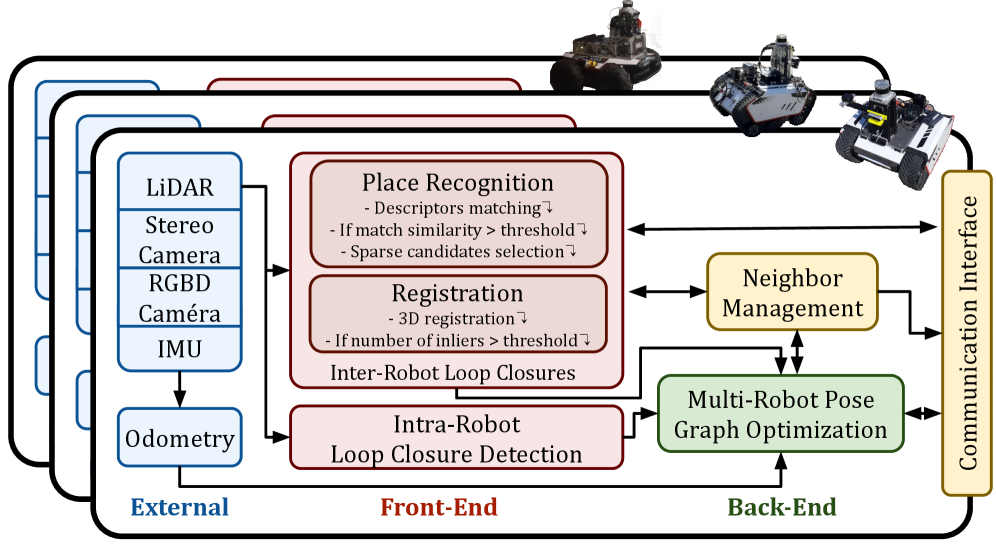
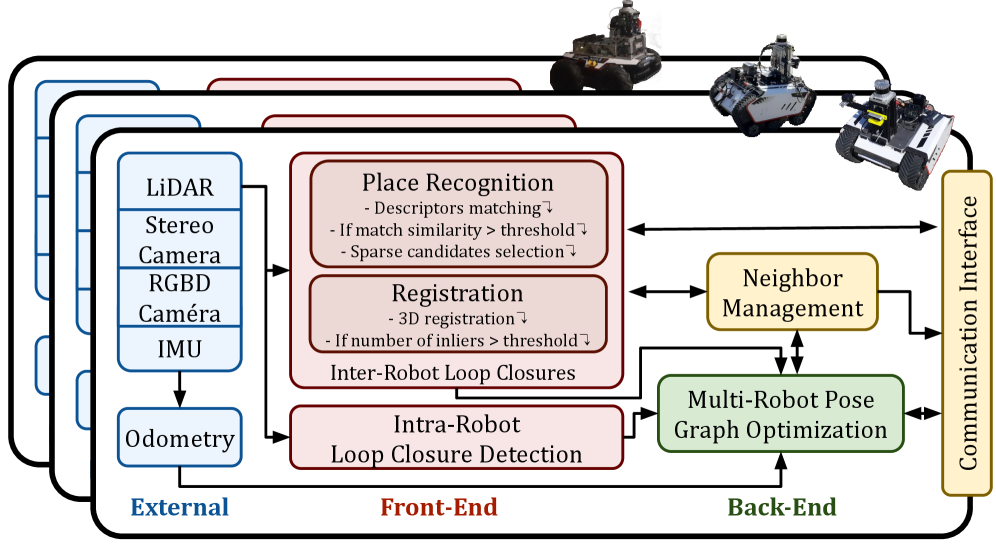
Centralized Collaborative Simultaneous Localization and Mapping (C-SLAM) systems are susceptible to failure if the central server malfunctions, creating a single point of failure. Furthermore, all data must transit through this central node, establishing a communication bottleneck that limits scalability and responsiveness, particularly with increasing numbers of robots or large environments. Swarm-SLAM mitigates these limitations by distributing the computational burden and eliminating the reliance on a central server. Each robot operates autonomously while intermittently exchanging information directly with nearby peers, allowing the system to continue functioning even if individual robots or communication links fail. This decentralized architecture inherently improves robustness and allows for greater scalability compared to traditional C-SLAM approaches.
Swarm-SLAM utilizes intermittent peer-to-peer communication to enable collaborative mapping in environments where continuous connectivity is impractical or unreliable. Robots within the swarm exchange map information – specifically, landmark observations and relative pose estimates – only when a communication link is established. This contrasts with centralized approaches requiring constant communication with a base station. The system is designed to tolerate periods of disconnection; robots continue local mapping and localization during these times, and upon re-establishing communication, share accumulated data to refine the global map and correct for accumulated drift. This method reduces bandwidth requirements and increases robustness to communication failures, enabling scalable multi-robot mapping in challenging environments.
Inter-robot loop closure in Swarm-SLAM functions by identifying previously visited locations by multiple robots, enabling the creation of constraints within a shared pose graph. This process involves matching features observed by different robots at the same location, and formulating relative pose constraints that are then incorporated into a global optimization problem. By collaboratively optimizing the pose graph, the system minimizes accumulated drift errors, resulting in a consistent and accurate map. The implementation relies on detecting and verifying loop closures to prevent the introduction of false constraints, and employs robust estimation techniques to handle noisy measurements and outliers, ultimately improving the overall map quality and localization accuracy of the robot swarm.
Swarm-SLAM utilizes an Ad-Hoc Network to facilitate communication between robots without reliance on pre-existing infrastructure. This network is established dynamically, meaning connections are formed on demand as robots enter communication range, and are maintained only for the duration of data exchange. The topology of the network is therefore constantly shifting, requiring the system to be robust to intermittent disconnections and varying bandwidth. Communication is initiated locally, and messages are relayed between robots as needed, creating a decentralized mesh network for sharing mapping data and pose information. This approach contrasts with centralized systems which require all communication to pass through a single base station, and allows for scalability and resilience in dynamic environments.
Bandwidth is a Lie: Prioritizing the Illusion
The Communication Budget represents a defined limit on the volume of data exchanged between robots, directly impacting the feasibility of inter-robot loop closures. Given measured inter-robot throughput ranging from 5-20 Mbps, the number of candidate loop closure matches that can be transmitted, verified, and integrated into the pose graph is constrained. Exceeding this budget leads to data loss, increased latency, and ultimately, a reduction in the accuracy and completeness of the global map. Consequently, efficient data prioritization and compression techniques are critical to maximizing the number of effective loop closures within these bandwidth limitations.
Spectral Sparsification operates by assessing the information content of potential loop closure matches before transmission, thereby optimizing the use of the available communication budget. This prioritization is achieved through the calculation of a spectral descriptor for each scan, representing its unique geometric characteristics. Candidate matches are then evaluated based on the similarity of their spectral descriptors; those exhibiting high similarity, and thus likely representing the same place, are prioritized for transmission. This method effectively reduces the number of redundant or low-information matches communicated between robots, focusing bandwidth on the most valuable loop closure candidates and improving the overall efficiency of the pose graph optimization process.
Robust place recognition is achieved through the implementation of ScanContext, a global descriptor that characterizes scenes based on spherical viewpoint distributions. This allows for accurate loop closure detection even in environments presenting challenges such as limited texture, repetitive structures, or significant viewpoint changes. ScanContext generates a compact representation of the environment, enabling efficient matching of candidate loop closures despite potential ambiguities or noise. The descriptor is designed to be invariant to common environmental factors, thereby increasing the reliability of loop closure identification and contributing to more accurate pose graph optimization.
TEASER++ (Tracking and Estimating Alignment using Robust Statistics++) is employed to facilitate fast and certifiable registration within the pose graph optimization process. This iterative algorithm minimizes the cost function representing the difference between observed and estimated robot poses, while simultaneously providing statistical guarantees on the accuracy of the resulting solution. Specifically, TEASER++ utilizes a robust loss function and outlier rejection strategy to mitigate the impact of erroneous matches, ensuring reliable convergence even in the presence of noise and ambiguities. The algorithm’s computational efficiency allows for real-time pose graph optimization, critical for maintaining map consistency and accurate localization during operation, and the certifiable aspect enables quantifiable assessment of the solution’s quality.
System performance was evaluated in a planetary analogue environment, yielding an Absolute Translation Error (ATE) of 3.74 ± 1.63 meters. This metric quantifies the average difference between the true and estimated robot poses after pose graph optimization. The reported standard deviation indicates the variability of these errors across the evaluated trajectory. This level of accuracy was achieved despite operating under constrained communication conditions, with measured inter-robot throughput ranging from 5-20 Mbps, demonstrating the system’s robustness to bandwidth limitations and its ability to maintain accurate localization even with infrequent communication updates.
During operational testing, inter-robot communication throughput was measured between 5 and 20 Mbps. This limited bandwidth significantly constrains the amount of data that can be exchanged, necessitating efficient communication strategies. The observed throughput directly impacts the frequency and complexity of data sharing, such as point clouds or feature descriptors, required for tasks like loop closure and map merging. Consequently, algorithms and data structures must be optimized to maximize information transfer within these bandwidth limitations to maintain system performance and accuracy.

The Illusion of Understanding: Mapping Beyond Geometry
At the heart of reliable robotic navigation lies accurate odometry, and LIO-SAM provides a particularly robust solution by intelligently fusing data from LiDAR and inertial measurement units (IMUs). LiDAR provides precise 3D measurements of the surrounding environment, allowing the system to build a detailed map and localize within it. However, LiDAR data can be intermittent or unreliable in feature-poor environments. This is where the IMU becomes critical; by measuring the robot’s acceleration and angular velocity, the IMU provides continuous, albeit noisy, estimates of the robot’s motion. LIO-SAM employs a sophisticated optimization framework to combine these complementary data streams, effectively mitigating the weaknesses of each sensor and delivering highly accurate and consistent odometry estimates-a foundational element for the entire localization pipeline and enabling robots to confidently determine their position and orientation in complex environments.
Real-Time Kinematic (RTK) GPS offers a significant refinement to a robot’s understanding of its location, particularly when operating outdoors. By utilizing carrier-phase measurements from GPS satellites, RTK GPS can achieve centimeter-level positioning accuracy – a substantial improvement over standard GPS. This precision is enabled by a fixed base station with a known location, which transmits corrections to the robotic unit, effectively cancelling out common errors. While LiDAR and IMU systems excel at relative localization – tracking movement over short distances – RTK GPS anchors the robot to a global coordinate frame, preventing the gradual accumulation of drift and ensuring accurate long-term mapping and navigation. Consequently, the synergy between RTK GPS and other sensor modalities allows for the creation of highly detailed and geometrically consistent environmental representations.
Robotic exploration of expansive and complex environments benefits significantly from the synergy between collaborative mapping and robust localization techniques. By simultaneously building a map and determining its own location within that map, a robot can navigate previously uncharted territories with increased speed and reliability. This approach moves beyond simple sequential mapping – where errors accumulate over distance – as collaborative mapping allows multiple robots to share and refine map data in real-time, dramatically reducing uncertainty. Furthermore, robust localization, achieved through sensor fusion and advanced algorithms, enables the robot to maintain an accurate pose estimate even in the presence of sensor noise, dynamic obstacles, or feature-poor environments. The resulting system exhibits unprecedented resilience, allowing for continuous operation and efficient coverage of large-scale areas – a capability crucial for applications ranging from automated infrastructure inspection to large-scale disaster response.
The detailed and accurate maps generated through robust localization and mapping techniques are proving invaluable across a diverse range of fields. In environmental monitoring, these maps facilitate the creation of high-resolution 3D models of ecosystems, enabling precise analysis of changes over time and supporting conservation efforts. For search and rescue operations, the ability to rapidly map complex or disaster-stricken areas provides first responders with critical situational awareness, increasing the likelihood of successful rescues. Furthermore, the technology is poised to revolutionize planetary exploration, allowing autonomous robots to navigate and map extraterrestrial environments with unprecedented detail, aiding in the search for resources and signs of life, and providing the foundation for future human settlements.

The Inevitable Horizon: Beyond the Map
Continued development of Swarm-SLAM prioritizes extending its operational capacity within increasingly intricate and changeable environments. Current research aims to move beyond controlled settings and address the challenges posed by unpredictable real-world scenarios, such as those involving rapidly shifting landscapes or the presence of moving obstacles. This involves refining algorithms to handle larger robot swarms – increasing the number of participating units without sacrificing performance – and enhancing the system’s robustness to sensor noise and communication failures. A key area of investigation centers on developing more efficient data association techniques, enabling robots to accurately track features and maintain consistent maps even in highly cluttered or dynamic scenes. Ultimately, the goal is a Swarm-SLAM system capable of seamlessly adapting to unforeseen circumstances and reliably constructing accurate environmental representations across diverse and challenging terrains.
Current Swarm-SLAM systems often grapple with the substantial communication demands of coordinating multiple robots, particularly as swarm size increases. Researchers are now investigating event-based communication protocols as a means of drastically reducing bandwidth requirements. Unlike traditional methods that continuously transmit data, event-based systems only share information when a significant change occurs in the environment or a robot’s perception. This selective transmission focuses communication on critical updates – such as the detection of a new landmark or a substantial deviation in pose estimation – rather than redundant or incremental data. By prioritizing salient events, these strategies promise to minimize network congestion, extend operational range, and enable more robust and scalable multi-robot mapping in bandwidth-constrained or dynamic environments, ultimately fostering greater autonomy and efficiency in collaborative exploration.
Current Simultaneous Localization and Mapping (SLAM) systems primarily focus on geometric representations of environments, creating maps based on distances and spatial relationships. However, integrating semantic mapping techniques promises to dramatically enhance these maps by layering contextual understanding. Rather than simply identifying where objects are, these advanced systems will discern what those objects are – distinguishing a chair from a table, or a doorway from a wall – and understanding their function within the environment. This allows robots to move beyond basic navigation and engage in more sophisticated reasoning, planning, and interaction with their surroundings. For example, a robot tasked with finding a specific object could leverage semantic information to focus its search on relevant areas – looking for a ‘coffee cup’ in a ‘kitchen’ rather than exhaustively scanning every corner of a building. Ultimately, this fusion of SLAM and semantics paves the way for robots that not only perceive the world but understand it, enabling truly intelligent and autonomous operation.
The envisioned culmination of Swarm-SLAM research lies in the development of a robotic system exhibiting complete autonomy and seamless collaboration, poised to address exploration challenges currently beyond automated reach. This isn’t merely about navigating unknown spaces, but about a collective intelligence where individual robots dynamically adapt to unforeseen obstacles, share critical information in real-time, and jointly construct a comprehensive understanding of their surroundings. Such a system promises applications ranging from autonomously charting disaster zones and conducting deep-sea surveys to exploring extraterrestrial environments and performing intricate search-and-rescue operations – all without direct human intervention. The focus remains on fostering a robust, adaptable, and truly collaborative robotic presence capable of pushing the boundaries of what’s possible in automated exploration.

The pursuit of decentralized SLAM, as detailed in this work, feels predictably Sisyphean. Researchers chase increasingly complex algorithms to achieve robust mapping under communication constraints, yet the fundamental problem remains: reality is messy. It’s a constant trade-off between theoretical elegance and the brute force required to make things function in the real world. As Ken Thompson famously observed, “Debugging is twice as hard as writing the code in the first place. Therefore, if you write the code as cleverly as possible, you are, by definition, not smart enough to debug it.” This perfectly encapsulates the situation; clever decentralized approaches inevitably encounter edge cases and communication failures that expose their fragility. The pursuit of Swarm-SLAM, much like any ‘revolutionary’ framework, will eventually become tomorrow’s tech debt, as production environments – in this case, planetary analogues – always find a way to break even the most carefully constructed theories.
What’s Next?
The exercise, as always, reveals the map is not the territory, and certainly not the budget. Swarm-SLAM, in this instance, functions less as a solution and more as a detailed catalog of failure modes. Communication constraints, predictably, remain the dominant force, dictating not what can be mapped, but what compromises are acceptable before the system devolves into politely disagreeing robots. The dataset itself will be useful, primarily as a benchmark for future attempts to elegantly sidestep the laws of physics and radio propagation.
Future work will inevitably focus on ‘optimizing’ communication – a process which, history suggests, will eventually be optimized back into something resembling the original constraints. The real challenge isn’t better algorithms, but better acceptance of imperfection. Loop closure detection, for example, isn’t a problem of statistics; it’s a problem of trusting data that has already demonstrated its willingness to lie.
Perhaps the most valuable outcome is the tacit acknowledgment that architecture isn’t a diagram, but a compromise that survived deployment. The pursuit of fully decentralized, collaborative systems will continue, not because it’s easy, but because the alternative – a single, exquisitely fragile point of control – is demonstrably worse. It’s not about building a perfect map; it’s about building a system that can continue functioning, even as the map inevitably degrades.
Original article: https://arxiv.org/pdf/2601.21063.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- ‘Project Hail Mary’s Unexpected Post-Credits Scene Is Worth Sticking Around
- Beyond Accuracy: Gauging Trust in Human-AI Teams
- Gold Rate Forecast
- Clash Royale Balance Changes March 2026 — All Buffs, Nerfs & Reworks
- The most surprising Hannah Montana cameos: From John Cena to Dwayne Johnson and even a Coronation Street soap star as show celebrates its 20th anniversary
- Genshin Impact Version 6.5 Leaks: List of Upcoming banners, Maps, Endgame updates and more
- eFootball 2026 is bringing the v5.3.1 update: What to expect and what’s coming
- Total Football free codes and how to redeem them (March 2026)
- EMEA Masters Winter 2026 introduces official Qualifier for Esports World Cup
- Brawl Stars Brawl Cup Pro Pass arrives with the Dragon Crow skin and Chroma, unique cosmetics, and more rewards
2026-01-31 02:31