Author: Denis Avetisyan
A new framework leverages the synergy between sensing, communication, and control to unlock enhanced agility and efficiency in unmanned aerial vehicle swarms.
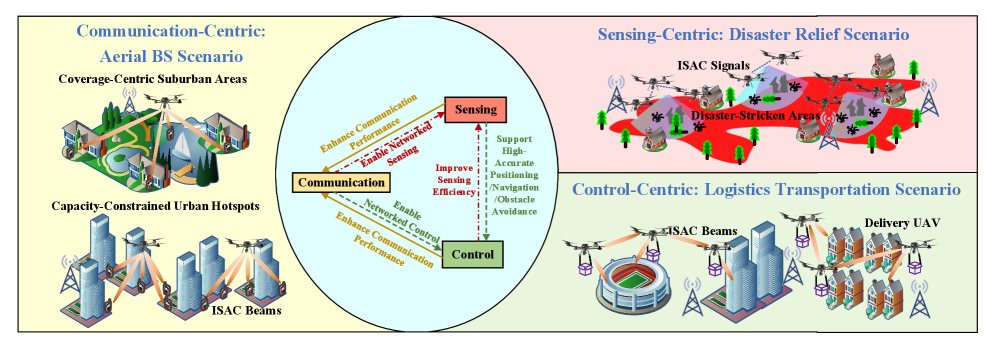
This review explores the potential of Integrated Sensing and Communication (ISCC) to optimize resource allocation, trajectory control, and collision avoidance in dynamic UAV swarm applications.
Traditional approaches to uncrewed aerial vehicle (UAV) swarm control often treat sensing, communication, and control as isolated components, limiting overall system agility and efficiency. This paper, ‘Integrated Sensing, Communication and Control enabled Agile UAV Swarm’, introduces a deeply coupled framework that co-optimizes these elements to enhance performance in applications like disaster relief and logistics. By establishing a tightly-coupled closed-loop system, the proposed approach demonstrates improved resource allocation, trajectory control, and dynamic spectrum access. Could this integrated paradigm represent a fundamental shift in how we design and deploy autonomous UAV swarms for complex, real-world scenarios?
Deconstructing Connectivity: The Promise of Swarm Intelligence
Contemporary communication networks, largely built upon fixed terrestrial infrastructure, increasingly face limitations in adapting to swiftly evolving scenarios. Disaster relief, temporary events, and remote areas present particular challenges, as establishing and maintaining traditional networks can be both time-consuming and prohibitively expensive. Moreover, these static systems struggle to accommodate the growing demand for connectivity from mobile devices and the Internet of Things, resulting in congestion and reduced performance. The inherent rigidity of existing infrastructure hinders responsiveness to unforeseen circumstances and limits scalability, creating a pressing need for more agile and adaptable communication solutions capable of bridging connectivity gaps and supporting dynamic environments.
Unmanned aerial vehicle (UAV) swarms present a compelling alternative to traditional, fixed wireless infrastructure, offering a dynamic and adaptable approach to extending connectivity. These coordinated groups of aerial vehicles can be rapidly deployed to provide temporary or emergency communication networks, reaching areas difficult or costly to access with conventional methods. Beyond simply replicating existing coverage, UAV swarms unlock possibilities for novel applications like precision agriculture – delivering localized data and connectivity to individual plants – and on-demand, high-bandwidth access for events or disaster relief. The economic benefits are also significant; deploying a swarm requires substantially lower upfront investment compared to building and maintaining ground-based towers, and the scalability of the swarm allows for coverage adjustments based on real-time needs, making it a highly cost-effective solution for diverse scenarios.
Successfully deploying UAV swarms for widespread wireless connectivity isn’t simply a matter of launching multiple drones; significant hurdles remain in the realms of communication, coordination, and control. Establishing robust and reliable inter-UAV communication links, particularly in dense or contested electromagnetic environments, presents a core challenge, as does ensuring seamless handoff between drones to maintain uninterrupted service. Beyond communication, sophisticated coordination algorithms are needed to prevent collisions, optimize swarm geometry for maximal coverage, and dynamically adapt to changing environmental conditions and user demands. Finally, centralized or distributed control mechanisms must be developed that are resilient to drone failures, adaptable to unforeseen circumstances, and capable of managing the complex interplay between individual UAVs while upholding network-wide performance objectives. Overcoming these challenges will be crucial to unlocking the transformative potential of UAV swarms as a future cornerstone of wireless infrastructure.
Navigating the Chaos: Adaptive Data Routing in Swarm Networks
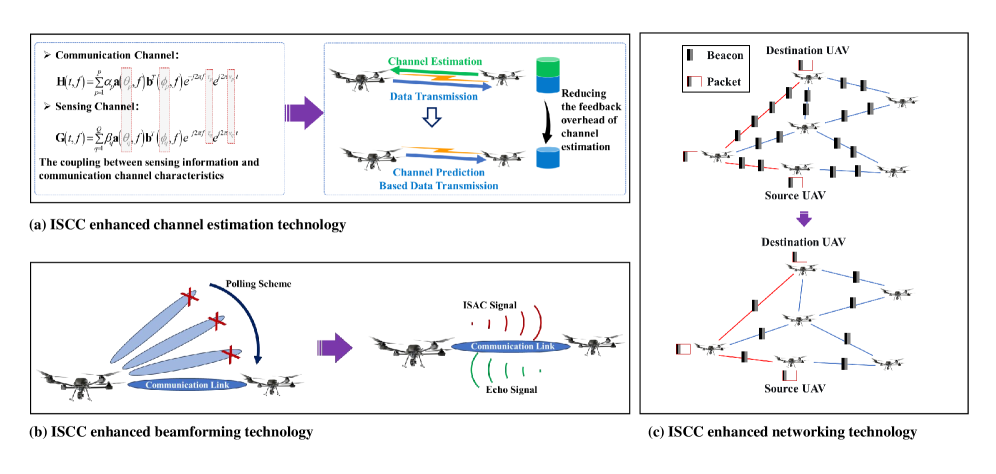
Effective communication within a UAV swarm necessitates the establishment of optimal data transmission paths between each unit. This involves dynamically identifying routes that maximize throughput, minimize latency, and ensure reliable delivery of information. The complexity arises from the swarm’s mobility, leading to constantly changing network topologies and link qualities. Consequently, routing protocols must account for factors such as node position, signal strength, potential obstructions, and interference, continuously adapting to maintain connectivity and efficient data flow throughout the swarm. Achieving optimal paths is critical for coordinated behavior, sensor data aggregation, and successful completion of swarm-based tasks.
Data routing efficacy in UAV swarms is fundamentally limited by the instantaneous capacity of communication channels, which are subject to time-varying interference, signal fading, and node mobility. Consequently, static routing protocols are insufficient; adaptive algorithms are required to dynamically assess link quality and available bandwidth. These algorithms must continuously monitor channel state information (CSI), including signal-to-noise ratio (SNR) and bit error rate (BER), to make informed routing decisions. Furthermore, algorithms should incorporate predictive elements, anticipating future channel conditions based on node movement and environmental factors, to proactively adjust routes and maintain reliable connectivity. The performance of these adaptive algorithms is typically evaluated using metrics such as packet delivery ratio, end-to-end delay, and network throughput under varying network topologies and mobility patterns.
The Integrated Sensing, Communication, and Control (ISCC) framework consistently achieves 100% accuracy in neighbor discovery within a UAV swarm, a performance level not consistently maintained by alternative methodologies as node density increases. This improved accuracy directly results from the incorporation of sensing capabilities, which significantly reduces the reliance on periodic beacon exchanges for neighbor identification. By minimizing these beacon transmissions, the ISCC framework substantially decreases routing table update times, leading to more efficient and responsive network operation even in highly dynamic environments with a large number of UAVs.
![Communication-and-control enhancements significantly improve sensing accuracy ([latex]ARMSE[/latex]) for UAV swarms, while ISCC-enabled neighbor discovery and routing yield highly accurate neighbor lists and fast routing table updates.](https://arxiv.org/html/2601.14783v1/x9.png)
Beyond Autonomy: Fusing Sensing and Control for Intelligent Swarms
Integrating sensing data into UAV swarm control algorithms improves operational precision and safety by enabling real-time adjustments based on environmental feedback. This integration moves beyond pre-programmed flight paths, allowing swarms to dynamically respond to unexpected obstacles, changing wind conditions, and the positions of other aerial vehicles or ground-based entities. Sensor modalities commonly utilized include LiDAR, radar, cameras (visual and infrared), and inertial measurement units (IMUs). Data fusion techniques, such as Kalman filtering or Bayesian networks, are employed to combine data from multiple sensors, reducing uncertainty and improving the accuracy of state estimation. Consequently, swarms can maintain tighter formations, execute more complex maneuvers, and operate more reliably in dynamic and unpredictable environments, decreasing the risk of collisions and mission failures.
Communication-enhanced sensing utilizes the characteristics of communication signals – including signal strength, angle of arrival, and frequency shifts – to derive information about the surrounding environment. This technique moves beyond traditional sensor data by interpreting how signals propagate and interact with objects. Specifically, analyzing received signal strength indication (RSSI) can approximate distances to obstacles, while angle of arrival estimations provide directional information. Doppler shifts, resulting from relative motion between UAVs and objects, contribute to velocity and proximity assessments. Integrating these signal-derived data points with data from onboard sensors improves the accuracy of environmental perception, enabling more robust navigation and obstacle avoidance, particularly in GPS-denied or visually-obscured environments.
Sensing-enhanced control systems for UAV swarms necessitate a dual consideration of performance metrics: the probability of detection ([latex]P_d[/latex]) and the probability of false alarms ([latex]P_{fa}[/latex]). [latex]P_d[/latex] represents the likelihood that the system correctly identifies a valid target, while [latex]P_{fa}[/latex] indicates the likelihood of incorrectly identifying a non-target as valid. Optimizing solely for high [latex]P_d[/latex] can result in an unacceptable increase in [latex]P_{fa}[/latex], leading to wasted resources or incorrect actions by the swarm. Conversely, minimizing [latex]P_{fa}[/latex] often reduces [latex]P_d[/latex]. Therefore, effective target identification requires balancing these competing probabilities, often achieved through techniques like adjusting detection thresholds or employing sensor fusion algorithms to increase confidence in target validation.
From Disaster Zones to Reliable Networks: Real-World Implications
Following a disaster, when conventional infrastructure is often compromised, unmanned aerial vehicle (UAV) swarms offer an unprecedented capacity for rapid assessment and communication. These coordinated aerial networks can quickly map affected areas, identifying structural damage and locating survivors-information vital for directing rescue efforts and allocating resources. Beyond visual surveys, equipped with specialized sensors, these swarms can detect gas leaks, assess radiation levels, or even monitor the structural integrity of critical infrastructure like bridges and dams. The ability to establish a temporary, self-organizing communication network is equally crucial; UAVs can act as aerial relay stations, restoring connectivity when ground-based systems fail, and providing a lifeline for first responders and those affected. This capability promises to dramatically accelerate relief operations, improving response times and ultimately saving lives in the critical hours and days following a crisis.
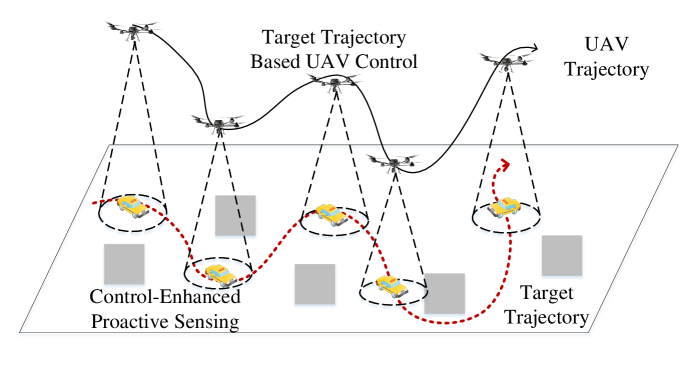
The successful deployment of unmanned aerial vehicle (UAV) swarms hinges on their ability to navigate complex environments safely and efficiently, demanding robust trajectory control systems. Effective path planning isn’t simply about finding a route, but dynamically adjusting to unforeseen obstacles, changing conditions, and the movements of other swarm members. This requires algorithms capable of rapidly recalculating trajectories without sacrificing stability or collision avoidance – a critical factor when operating in dense or unpredictable scenarios. Such adaptive control is paramount not only for the swarm’s longevity and operational success, but also for building public trust and ensuring safe integration into shared airspace, unlocking the full potential of collaborative aerial robotics.
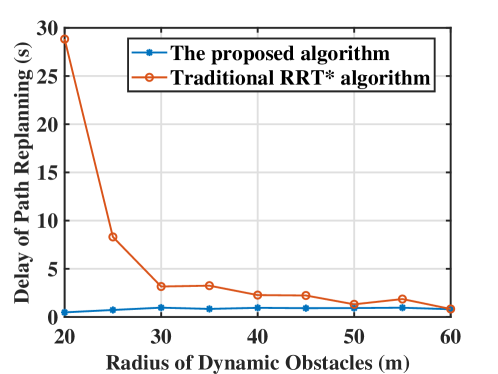
The ISCC framework represents a significant advancement in UAV swarm navigation, demonstrably reducing the time required to recalculate flight paths when faced with unexpected obstacles or changing conditions. Rigorous testing reveals that improved sensing accuracy directly correlates with decreased path replanning delay within the ISCC system; this performance notably exceeds that of established algorithms such as RRT*. This enhanced responsiveness is crucial for real-world applications, allowing swarms to dynamically adapt to unpredictable environments and maintain operational efficiency – a key factor in time-sensitive scenarios like disaster response or complex infrastructure inspection. The ability to swiftly adjust trajectories not only improves safety but also optimizes resource allocation within the swarm, maximizing its overall effectiveness.
The pursuit of an Integrated Sensing, Communication, and Control (ISCC) framework, as detailed in the study, inherently challenges conventional approaches to UAV swarm management. It posits a system where rigid control structures yield to dynamic resource allocation and adaptive trajectory control. This echoes Henry David Thoreau’s sentiment: “Go confidently in the direction of your dreams! Live the life you’ve imagined.” The research doesn’t simply optimize existing parameters; it actively questions the established boundaries of what’s possible in wireless networks and collision avoidance, forging a new path towards more agile and responsive UAV swarms for critical applications like disaster relief and logistics. The framework deliberately disrupts the status quo to reveal a more effective solution.
Beyond the Swarm: What Lies Ahead?
The presented framework attempts a seamless integration of sensing, communication, and control – a laudable goal, yet one that inherently invites scrutiny. The very act of optimization within a closed system begs the question: what anomalies are suppressed in the pursuit of agility? One suspects the true advances will not stem from refining the existing architecture, but from deliberately introducing controlled instabilities. What happens when the communication network isn’t perfectly reliable? Does a degree of sensory ambiguity actually enhance swarm resilience, forcing decentralized problem-solving?
Current explorations largely treat the environment as a known quantity, a stage upon which the swarm performs. But what if the environment is actively deceptive? Consider scenarios involving adversarial interference, or naturally occurring phenomena that mimic malicious signals. The current emphasis on dynamic spectrum access assumes a cooperative spectrum landscape. A more robust system might anticipate, even expect, spectral jamming, and incorporate strategies for information warfare at the swarm level.
Ultimately, the pursuit of ‘agile’ swarms risks creating overly specialized systems, brittle in the face of genuine novelty. The next phase should not focus on perfecting control, but on cultivating a degree of ‘productive failure’ – an ability to learn and adapt through error. Perhaps the most valuable metric isn’t efficiency, but the swarm’s capacity to exploit the unexpected.
Original article: https://arxiv.org/pdf/2601.14783.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Invincible Season 4 Episode 4 Release Date, Time, Where to Watch
- Physics Proved by AI: A New Era for Automated Reasoning
- How Martin Clunes has been supported by TV power player wife Philippa Braithwaite and their anti-nepo baby daughter after escaping a ‘rotten marriage’
- CookieRun: OvenSmash coupon codes and how to use them (March 2026)
- American Idol vet Caleb Flynn in solitary confinement after being charged for allegedly murdering wife
- Goddess of Victory: NIKKE 2×2 LOVE Mini Game: How to Play, Rewards, and other details
- Total Football free codes and how to redeem them (March 2026)
- Only One Straw Hat Hasn’t Been Introduced In Netflix’s Live-Action One Piece
- Olivia Colman’s highest-rated drama hailed as “exceptional” is a must-see on TV tonight
- Gold Rate Forecast
2026-01-23 02:45