Author: Denis Avetisyan
Researchers have developed a portable magnetic platform and AI algorithm enabling precise, calibration-free control of microrobots within the gastrointestinal tract.
This work demonstrates a mobile magnetic manipulation system using deep reinforcement learning for millimeter-scale navigation and trajectory tracking in simulated and real gastrointestinal environments.
Effective gastrointestinal (GI) navigation with magnetically actuated robots is hindered by the complexities of precise control and system calibration. This limitation is addressed in ‘A Mobile Magnetic Manipulation Platform for Gastrointestinal Navigation with Deep Reinforcement Learning Control’, which introduces a portable, low-cost system leveraging deep reinforcement learning for model-free control. The platform achieves millimeter-scale precision in tracking a magnetic capsule within a clinically relevant workspace, significantly reducing setup time compared to traditional methods. Could this approach pave the way for more accessible and effective targeted drug delivery within the GI tract?
Unveiling the Labyrinth: Navigating the GI Tract
The gastrointestinal (GI) tract, while essential for nutrient absorption, presents a significant hurdle for targeted drug delivery. Its convoluted anatomy – comprising twisting pathways, narrow lumens, and dynamic contractions – demands sophisticated navigation strategies for therapeutic agents to reach specific sites. Simply administering a drug systemically often results in low bioavailability at the target and potential side effects due to widespread distribution. Consequently, researchers are increasingly focused on developing technologies that enable precise maneuvering within the GI tract, aiming to guide therapeutic payloads directly to areas of disease, such as tumors or inflamed tissues. Success in this field relies on overcoming the physiological challenges posed by the tract’s structure and motility, ultimately maximizing therapeutic efficacy while minimizing systemic exposure and adverse reactions.
The advancement of magnetically guided microrobots within the gastrointestinal (GI) tract is currently hampered by significant limitations in both workspace and control precision. Existing methods often rely on external magnetic fields generated by stationary coils or robotic arms, restricting maneuverability to relatively straight pathways and failing to reach distal regions of the intestine. Precise navigation-essential for targeted drug delivery or diagnostic procedures-is further complicated by the GI tract’s convoluted anatomy and peristaltic motion. Current systems struggle to maintain a stable grasp on the microrobot, leading to imprecise trajectories and potential loss of control, especially when attempting complex maneuvers around bends or through narrow passages. This lack of fine-grained control represents a crucial hurdle in realizing the full therapeutic potential of these miniature devices.
Conventional magnetic actuation systems, such as fixed coil arrangements, present a significant hurdle in guiding microrobots through the winding pathways of the gastrointestinal tract. These systems typically generate magnetic fields limited to a specific workspace and orientation, hindering their ability to follow the intricate curves and constrictions of the digestive system. The rigidity of these setups restricts the achievable range of motion, making it difficult to steer microrobots along complex, non-linear trajectories necessary to reach targeted locations within the GI tract. Consequently, researchers are actively exploring alternative actuation methods that offer greater degrees of freedom and adaptability to overcome these limitations and enable precise, maneuverable navigation for effective drug delivery and diagnostics.
Expanding the Reach: Mobile Platforms as Extensions of Control
Magnetic actuation systems traditionally operate within a limited, fixed workspace. Integration with mobile platforms, particularly robotic arms, overcomes this constraint by physically relocating the actuation source and expanding the accessible volume. This approach enables manipulation of objects outside the immediate reach of a static setup, and allows for access to complex geometries or remote locations. The effective workspace is no longer defined by the dimensions of the actuation device itself, but by the range of motion and reach of the supporting robotic platform. This extension is critical for applications requiring large-scale manipulation, in-situ repair, or interaction with environments inaccessible to fixed systems.
Robotic platforms such as the Articulated Robotic Magnet Manipulator (ARMM) and RoboMag showcase the benefits of integrating electromagnets with robotic arm technology. ARMM utilizes a 7-DOF robotic arm to position and orient electromagnets, enabling manipulation of ferromagnetic objects in three-dimensional space with increased precision and dexterity. RoboMag similarly employs a robotic arm to support and control multiple electromagnets, allowing for parallel manipulation and complex assembly tasks. These systems demonstrate enhanced control compared to stationary magnetic actuation by facilitating greater reach, variable positioning, and the ability to adapt to changing workspace configurations. The robotic integration also provides opportunities for automated manipulation sequences and remote operation, expanding the scope of magnetic actuation applications.
The implementation of mobile magnetic actuation systems is currently limited by the Model-Calibration Bottleneck, which refers to the significant time and resources required to establish and maintain accurate control. These systems necessitate precise modeling of the magnetic field generated by electromagnets and their interaction with the environment, including ferromagnetic materials. Achieving this precision involves extensive data acquisition, complex computational analysis, and iterative refinement of the model parameters. The process is particularly challenging due to the non-linear and spatially-varying nature of magnetic fields, as well as external disturbances and variations in material properties. Consequently, calibration can become a significant impediment to rapid prototyping, deployment, and adaptation of these robotic systems.
Accurate control of magnetic actuation systems on mobile platforms necessitates precise modeling of the magnetic field, a process that presents significant computational challenges. The magnetic field is inherently complex, influenced by the geometry of the electromagnets, the materials in the environment, and the position of the robotic platform. Creating a sufficiently detailed model requires intensive computation, particularly when accounting for hysteresis and eddy current effects. Furthermore, maintaining model accuracy is difficult due to variations in environmental factors, wear on mechanical components, and potential drift in sensor readings; frequent recalibration and updates to the magnetic field model are therefore essential, adding to the overall system complexity and operational overhead.
Breaking the Mold: A Learning-Based Approach to Magnetic Control
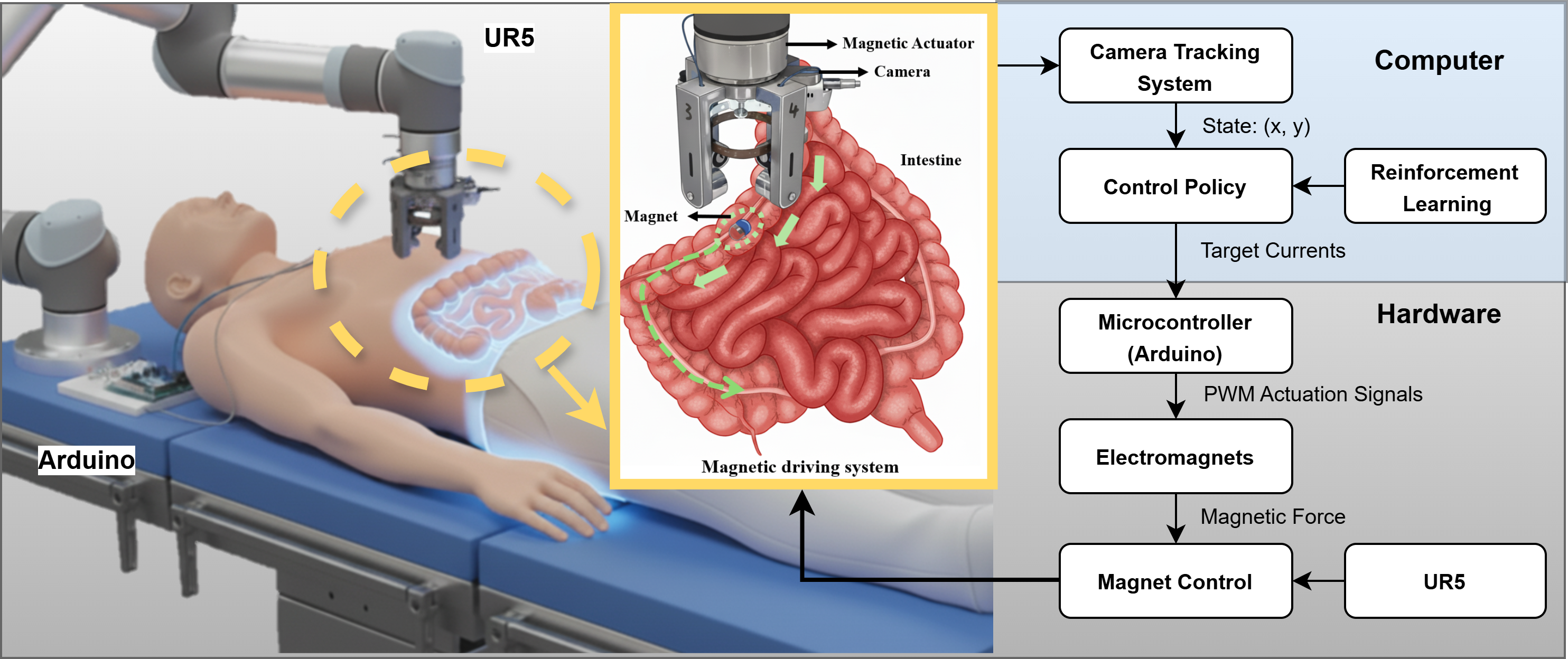
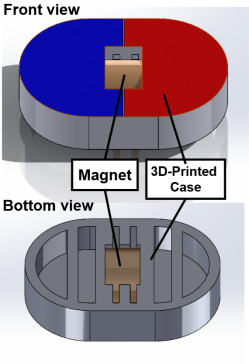
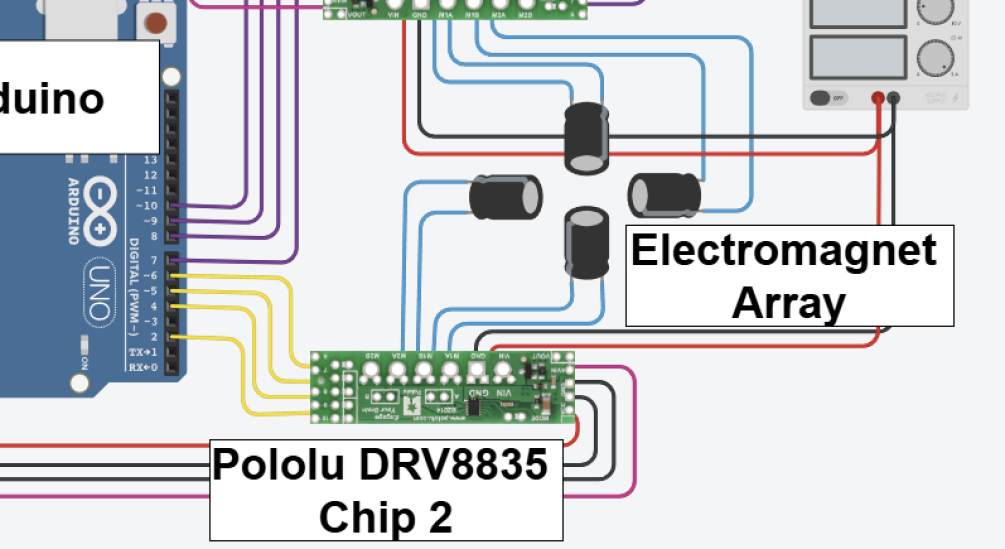
The Portable Magnetic Manipulation Platform represents a shift from traditional model-based control systems to a learning-based framework for magnetic manipulation tasks. This platform integrates a Universal Robots UR5 collaborative robot with a custom-designed Electromagnet Array, enabling precise control of a Magnetic Capsule. By employing learning-based techniques, the system circumvents the need for accurate physical modeling, which can be complex and prone to error in magnetic systems. This approach allows for adaptability to variations in the magnetic environment and capsule characteristics, and facilitates the implementation of advanced control strategies such as Deep Reinforcement Learning. The platform’s portability allows for flexible deployment in various research and application settings.
The Portable Magnetic Manipulation Platform employs a Universal Robots UR5 collaborative robot to precisely position and control an electromagnet array. This array generates a magnetic field used to manipulate a dedicated Magnetic Capsule within the workspace. The UR5 provides six degrees of freedom, enabling movement of the electromagnet array in three-dimensional space. The capsule’s movement is dictated by the generated magnetic field, allowing for contactless manipulation. This configuration facilitates research into magnetic control algorithms and robotic manipulation techniques, providing a versatile platform for both simulation and physical experimentation.
Trajectory tracking experiments were conducted to assess the platform’s 2D path following capabilities, with Proportional-Integral-Derivative (PID) control established as a performance baseline. Results indicate an approximate Root Mean Squared Error (RMSE) of 1.01 mm when tracking square trajectories and 1.25 mm for circular trajectories. This metric quantifies the average deviation between the desired path and the actual path followed by the magnetically manipulated capsule, providing a quantifiable measure of tracking accuracy under PID control.
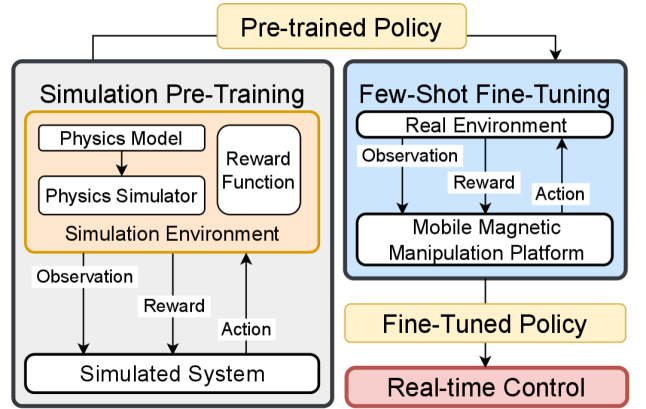
System validation employed a dual approach consisting of simulations and physical experimentation. Simulations were conducted utilizing both the Fossen Model, providing dynamic accuracy, and the Magnetic Dipole Model, focusing on magnetic field interactions. These simulations were then corroborated by physical experiments performed on the platform. This combined validation strategy ensured the reliability of results and the transferability of the control algorithms to a real-world environment. Critically, the implementation of this learning-based framework reduced the Deep Reinforcement Learning (DRL) training time from several days – a common limitation of similar systems – to just 45 minutes, demonstrating a significant improvement in training efficiency.
Towards Precision and Impact: Navigating the Future of Targeted Therapies
The platform’s innovative design prioritizes practical implementation by circumventing the need for intricate, physics-based modeling. Instead of relying on detailed simulations of magnetic fields and tissue interaction, the system employs a learning-based approach, allowing it to adapt and optimize its performance through data acquisition. This methodology significantly reduces calibration time – a crucial factor for clinical translation – as the system learns the dynamics of the magnetic capsule within the testing environment directly. Consequently, the platform offers a streamlined pathway towards deployment in complex biological environments, focusing on real-time adaptation rather than pre-computed theoretical models.
The precision of magnetic capsule navigation is significantly improved through the integration of camera-based guidance. This system employs visual tracking to continuously monitor the capsule’s position within the testing environment, providing real-time feedback to the control algorithms. By correlating camera data with the magnetic field applied, the system dynamically adjusts the magnetic forces, compensating for potential drift or inaccuracies. This visual servoing approach allows for highly accurate and responsive manipulation of the capsule, enabling it to follow complex trajectories with greater reliability and minimizing deviations from the intended path. The resulting enhancement is critical for applications requiring precise targeting, such as localized drug delivery or accessing specific anatomical locations during minimally invasive procedures.
Rigorous testing of the system’s three-dimensional navigational precision was conducted utilizing ex vivo models, carefully designed to replicate the complexities of biological tissues and provide a highly realistic operational environment. This approach allowed for comprehensive evaluation of the Magnetic Capsule’s trajectory control within a confined 30cm x 20cm workspace. Quantitative analysis revealed a remarkably low Root Mean Squared Error (RMSE) of just 1.50 mm, demonstrating the system’s ability to accurately guide the capsule to designated target locations with sub-centimeter precision. This level of accuracy is crucial for potential applications requiring pinpoint targeting, and validates the platform’s potential for reliable navigation within complex anatomical landscapes.
This research provides a crucial stepping stone towards advancements in targeted drug delivery and minimally invasive surgical procedures. By demonstrating precise, magnetically-guided navigation within realistic ex vivo models, the platform opens avenues for delivering therapeutic agents directly to affected tissues, minimizing systemic exposure and maximizing efficacy. Furthermore, the established framework facilitates the development of novel interventional tools capable of reaching previously inaccessible anatomical locations. The ability to accurately control micro-robotic devices in vivo promises to reshape treatment paradigms for a wide range of diseases, offering the potential for less invasive, more effective, and ultimately, more patient-centric healthcare solutions.
The pursuit detailed within this research – a mobile magnetic manipulation platform – echoes a sentiment articulated by Alan Turing: “Sometimes people who are unaware of their own limitations attempt to impose limitations on others.” The system presented bypasses the conventional constraints of meticulous calibration, embracing a model-free approach to gastrointestinal navigation. This isn’t simply about achieving millimeter-scale precision; it’s about challenging the established rules of robotic control. The platform’s capacity for sim-to-real transfer demonstrates a willingness to dismantle pre-conceived boundaries, mirroring Turing’s own spirit of inquiry and a belief in the power of unconstrained exploration within complex systems. The work subtly suggests that progress isn’t found in adhering to limitations, but in identifying and then exceeding them.
Opening the Gut: Future Directions
The presented work dismantles a conventional constraint-the need for meticulous calibration in magnetic microrobotics. This is not merely an engineering shortcut, but a philosophical statement. System identification, while valuable, implies a static universe, easily defined. The successful sim-to-real transfer suggests that sufficient exploration-allowing the algorithm to break the simulation’s assumptions-can yield control even in a complex, organic environment. Yet, the gut remains stubbornly non-ideal. Current precision, measured in millimeters, feels generous when considering the capillary networks and mucosal layers that represent the true challenge.
The next iteration isn’t about finer control, but about sensing the limits of control. What happens when the microrobot encounters unforeseen tissue densities, peristaltic contractions, or the chaotic flow of digestive fluids? A reactive, adaptive algorithm-one that actively seeks out the boundaries of its operational space-will prove far more valuable than incremental improvements to trajectory tracking.
Ultimately, this platform isn’t about navigating through the gut, but about understanding its intrinsic unpredictability. The real reward lies not in achieving a pre-planned path, but in mapping the deviations-the points where the system resists control, revealing the hidden architecture of the digestive tract. It is in these failures, these moments of controlled chaos, that genuine insight will emerge.
Original article: https://arxiv.org/pdf/2601.15545.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Invincible Season 4 Episode 4 Release Date, Time, Where to Watch
- Physics Proved by AI: A New Era for Automated Reasoning
- How Martin Clunes has been supported by TV power player wife Philippa Braithwaite and their anti-nepo baby daughter after escaping a ‘rotten marriage’
- CookieRun: OvenSmash coupon codes and how to use them (March 2026)
- Total Football free codes and how to redeem them (March 2026)
- Goddess of Victory: NIKKE 2×2 LOVE Mini Game: How to Play, Rewards, and other details
- American Idol vet Caleb Flynn in solitary confinement after being charged for allegedly murdering wife
- Gold Rate Forecast
- Nicole Kidman and Jamie Lee Curtis elevate new crime drama Scarpetta, which is streaming now
- “Wild, brilliant, emotional”: 10 best dynasty drama series to watch on BBC, ITV, Netflix and more
2026-01-23 22:43