Author: Denis Avetisyan
Researchers have developed a novel soft robotic actuator and quadruped capable of dynamically switching between walking and jumping gaits.
Asymmetric snapping structures and pneumatic networks enable tunable locomotion in a soft robotic platform.
Achieving both speed and efficiency in soft robotic systems remains a significant challenge. This is addressed in ‘Snapping Actuators with Asymmetric and Sequenced Motion’, which introduces a novel actuator design leveraging geometry-induced instability to generate controllable, asymmetric motion. By integrating four of these actuators into a pneumatic network, a quadrupedal robot demonstrates coordinated wavelike locomotion-achieving a peak speed of 72.78 mm/s at 7.5 Hz-and a transition from walking to jumping-like gaits. Could this approach pave the way for fully untethered, energy-efficient soft robots capable of complex adaptive behaviors?
The Fragility of Control: Seeking Resilience in Form
Conventional robotic systems frequently depend on a centralized control architecture, where a powerful processor directs every movement and sensor reading. While effective in structured environments, this approach proves brittle when faced with unforeseen circumstances or physical disturbances. The complexity of these control systems also introduces limitations in adaptability; a robot programmed for one task struggles to generalize to novel situations. Each component relies heavily on the central processor, creating a single point of failure and hindering robustness – a slight malfunction can disable the entire system. This contrasts sharply with biological systems, which exhibit remarkable resilience and adaptability through distributed control and inherent physical intelligence, prompting researchers to explore alternative robotic designs.
The emerging field of soft robotics is pioneering a departure from traditional, computationally-heavy control systems by embracing ‘physical control’. This innovative approach prioritizes embedding intelligence directly within the robot’s physical composition – its structure and materials – rather than relying on extensive programming. By carefully designing the robot’s form, incorporating materials with inherent properties like elasticity and shape memory, and utilizing clever mechanical linkages, complex behaviors can be achieved without the need for sophisticated algorithms or powerful processors. This means robots can respond directly to stimuli, adapt to unpredictable environments, and perform tasks with greater robustness and efficiency, essentially ‘thinking’ through their physical form rather than through computation.
The emerging field of soft robotics increasingly prioritizes achieving sophisticated functionality through ingenious mechanical design, minimizing reliance on traditional computational control. Instead of processing sensor data and issuing commands, these robots leverage the inherent physical properties of their materials – elasticity, flexibility, and unique geometries – to become the control system. This approach allows for behaviors like autonomous navigation around obstacles or delicate manipulation of objects, not through complex algorithms, but through carefully engineered responses to external stimuli. The robot’s form intrinsically dictates its function, enabling robust and adaptable performance even in unpredictable environments, and opening possibilities for robots that are inherently safer and more energy-efficient than their rigid, computationally-driven counterparts.
![The soft robot was fabricated using a two-part molding process-milling for the actuator and [latex]FDM[/latex] 3D printing for the actuation system-followed by final assembly.](https://arxiv.org/html/2602.18421v1/x2.png)
Harnessing Instability: The Power of Snapping Structures
Snapping structures achieve rapid movement through the storage and subsequent release of elastic potential energy. These systems function by deforming an element beyond its stable configuration, storing energy in the process. Upon reaching a critical point, the structure ‘snaps’ to an alternate stable state, releasing the stored energy as kinetic motion. This mechanism provides a means of actuation that can be more efficient than traditional motor-based systems, particularly for applications requiring intermittent or impulsive movements. The energy storage capacity is directly related to the material properties of the structure and the degree of deformation achieved prior to the snap-through event.
Snapping structures utilize geometries frequently derived from bistable shell designs to achieve actuation through transitions between stable equilibrium states. These structures store energy when deformed and release it rapidly via a discontinuous “snap” through buckling or other instability mechanisms. This process allows for powerful, albeit non-linear, movements with relatively low control complexity compared to traditional actuators. The snap-through behavior is characterized by a distinct force-displacement curve exhibiting multiple stable positions and a threshold force required to initiate the transition between them. This characteristic is leveraged for applications requiring impulsive forces or rapid positional changes.
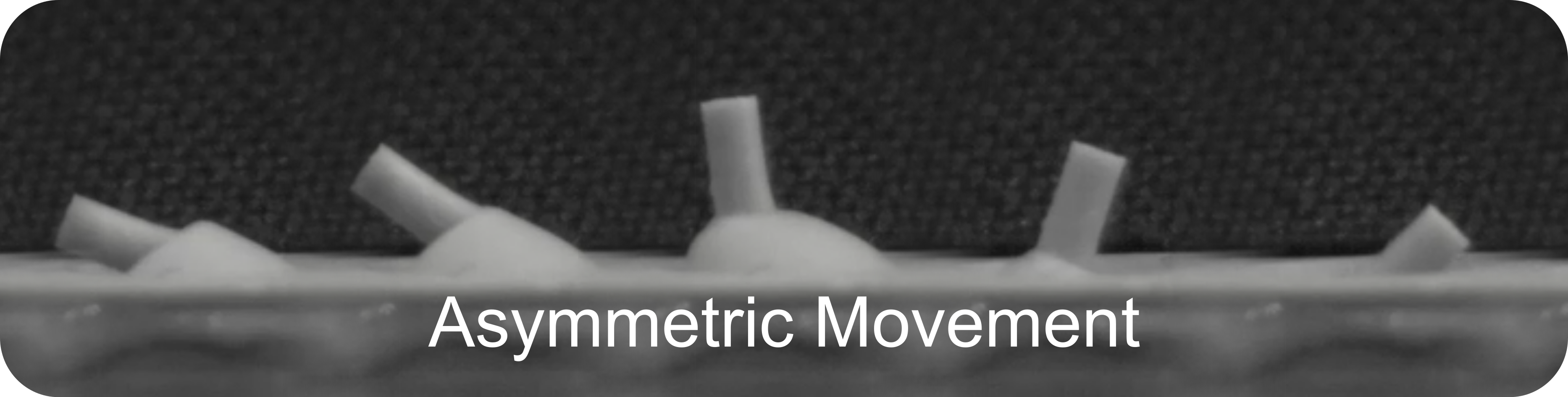
Asymmetric motion in snapping structures enables directional movement crucial for locomotion by intentionally designing geometries that favor one stable state transition over another. This is achieved through variations in structural stiffness or pre-stress, resulting in a net displacement during each snap-through cycle. However, energy dissipation is inherent in this process; testing demonstrates a hysteresis ratio of 36.6%, indicating that 36.6% of the input energy is lost to heat and structural deformation per cycle, rather than contributing to forward motion.
Eccentric Design: A Pathway to Controlled Asymmetry
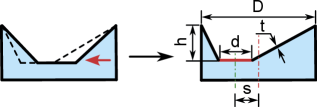
The Eccentric Snapping Actuator achieves controlled, asymmetric motion through the implementation of an offset dome geometry. This design deviates from traditional symmetrical actuators by intentionally introducing an off-center fulcrum point. When subjected to an external force – in this case, pneumatic pressure – the dome undergoes a non-linear ‘snap-through’ deformation. The offset geometry ensures that the force required for movement in one direction differs from that required in the opposing direction, resulting in a preferred direction of motion and enabling asymmetric actuation. This method avoids the need for complex mechanical linkages or multiple actuators to achieve directional control.
The Eccentric Snapping Actuator is driven by pneumatic control, which enables precise initiation of the snap-through motion. This is achieved by applying controlled air pressure to a pneumatic chamber, overcoming the initial static friction and inducing a rapid, asymmetric deformation of the actuator’s dome geometry. The pneumatic system allows for independent control of both the timing and magnitude of the applied force, facilitating repeatable and predictable actuation cycles. This level of control is critical for applications requiring dynamic and coordinated movements, such as legged locomotion, and permits fine-tuning of the actuator’s performance characteristics.
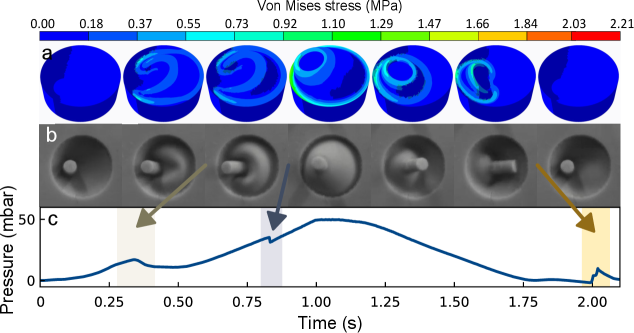
Performance validation of the Eccentric Snapping Actuator was conducted using Finite Element Simulation. The simulations employed a Neo-Hookean hyperelastic material model to accurately represent the actuator’s deformation under load, and Rayleigh damping was incorporated to model energy dissipation and ensure simulation stability. Results from these simulations correlated with physical testing, demonstrating a maximum locomotion speed of 2.91 Body Lengths per second [latex]BL s^{-1}[/latex] achieved by a four-legged robot operating at a frequency of 7.5 Hz.
Embodied Locomotion: A Quadrupedal Proof of Concept
A novel quadrupedal robot was developed utilizing uniquely designed eccentric snapping actuators to achieve surprisingly complex locomotion. These actuators, rather than relying on traditional motors, harness the principles of instability and rapid deformation to generate movement, allowing for a lightweight and potentially more energy-efficient design. The resulting soft robot demonstrates the viability of this approach, exhibiting coordinated leg movements driven solely by pneumatic pressure and the inherent snapping behavior of the actuators. This construction moves beyond simple robotic steps, enabling a dynamic gait and showcasing the potential for soft robotics to navigate varied terrains and perform intricate maneuvers – a significant step towards more adaptable and resilient robotic systems.
The robotic platform achieves coordinated movement through a carefully designed Sequencing Pneumatic Network. This network functions as the central nervous system of the robot, dictating the precise timing and order in which each leg actuator engages. Rather than operating all legs simultaneously, the network strategically sequences their activation, creating a gait that propels the robot forward. This approach not only enhances efficiency but also allows for nuanced control over the robot’s posture and stability. By manipulating the pneumatic signals within the network, researchers can dynamically adjust the gait, enabling the robot to adapt to varying terrains and navigate complex environments with a controlled, step-by-step progression.
Precise pneumatic control was achieved through the implementation of the FONS Framework, a modeling and simulation tool crucial for predictable robotic behavior. This framework enabled researchers to accurately forecast and refine the actuation sequences driving the four-legged robot’s locomotion. Testing revealed a direct correlation between actuation frequency and stride length; at 1 Hz, the robot achieved a stride of 5.13 mm s⁻¹, which progressively increased with frequency to 10.94 mm s⁻¹ at 2 Hz, 14.21 mm s⁻¹ at 3 Hz, and ultimately reached 16.83 mm s⁻¹ at 4 Hz. These results demonstrate the efficacy of the FONS framework in optimizing pneumatic systems for robotic applications and highlight the potential for scalable, frequency-tuned locomotion.

The exploration of asymmetric actuation and sequenced motion, as detailed in this work, reveals a fascinating truth about complex systems. It isn’t simply about achieving a desired outcome-locomotion, in this instance-but understanding how a system transitions between states. This resonates with a sentiment expressed by Claude Shannon: “The most important thing is to arrange information in such a way that it is easily used.” The researchers didn’t merely aim for movement; they meticulously crafted a pneumatic network and snapping structures to arrange the flow of energy, enabling a graceful shift from walking to a jumping-like gait. The elegance lies not in brute force, but in the careful orchestration of inherent properties, allowing the system to age-or, in this case, transition-gracefully.
What Lies Ahead?
This architecture, predicated on asymmetric snapping and pneumatic control, will inevitably reveal its limitations. Every system reaches a point of diminishing returns, and the transition from deliberate locomotion to the chaotic energy of a jump, while demonstrable, likely occupies a narrow and fragile operational space. The fidelity of simulations, however refined, will always lag the unpredictable nuances of physical embodiment – the material fatigue, the subtle variations in fabrication, the inescapable creep of entropy. These are not flaws, merely inherent properties of existence.
Future work will undoubtedly focus on increasing the robustness of these structures, perhaps through closed-loop control systems attempting to anticipate and counteract the inevitable decay. Yet, a more interesting trajectory might lie in accepting this impermanence. Can these actuators be designed not for longevity, but for graceful degradation? Could failure modes themselves become a form of locomotion, a different expression of the system’s potential? Improvements age faster than one can understand them.
The fundamental question remains: are these pneumatic networks merely tools for achieving specific motions, or are they, in fact, exploring the boundaries of what ‘control’ truly means? The pursuit of ever-more-complex actuation schemes feels increasingly like rearranging the deck chairs on a ship destined for the same ultimate harbor. This work, like all others, is a fleeting moment in a longer cycle; a transient expression of possibility before the inevitable return to equilibrium.
Original article: https://arxiv.org/pdf/2602.18421.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- ‘Project Hail Mary’s Unexpected Post-Credits Scene Is Worth Sticking Around
- Total Football free codes and how to redeem them (March 2026)
- Limbus Company 2026 Roadmap Revealed
- The Division Resurgence Specializations Guide: Best Specialization for Beginners
- After THAT A Woman of Substance cliffhanger, here’s what will happen in a second season
- Brawl Stars Sands of Time Brawl Pass brings Sandstalker Lily and Sultan Cordelius sets, along with chromas and more
- Brawl Stars Brawl Cup Pro Pass arrives with the Dragon Crow skin and Chroma, unique cosmetics, and more rewards
- Clash of Clans April 2026 Gold Pass Season introduces a Archer Queen skin
- XO, Kitty season 3 soundtrack: The songs you may recognise from the Netflix show
- Gold Rate Forecast
2026-02-23 21:20