Author: Denis Avetisyan
A new generative design framework creates adaptable soft robotic grippers capable of reliably grasping fragile organic materials, opening doors for automated coral restoration and beyond.
ReefFlex leverages topology optimization and multi-objective design to create soft robotic grippers for handling delicate objects like coral and other fragile materials.
Despite increasing fragility of critical ecosystems, automated handling of delicate organic structures remains a significant challenge. This is addressed in ‘ReefFlex: A Generative Design Framework for Soft Robotic Grasping of Organic and Fragile objects’, which introduces a novel generative design framework for soft robotic grippers capable of reliably and safely grasping fragile objects like coral. By encoding heterogeneous grasping into a simplified multi-objective optimization problem, ReefFlex demonstrably increases grasp success and quality while reducing adverse events during manipulation compared to conventional designs. Could this approach unlock scalable automation for not only coral restoration, but also other domains requiring the delicate handling of complex, irregularly shaped objects?
The Reef’s Prophecy: A System in Crisis
Coral reefs, often dubbed the rainforests of the sea, are experiencing a global crisis of unprecedented scale. These biodiverse ecosystems, supporting an estimated 25% of all marine life, face escalating threats from multiple stressors. Rising ocean temperatures, driven by climate change, induce coral bleaching – a phenomenon where corals expel symbiotic algae, leading to starvation and death. Simultaneously, human activities like pollution from agricultural runoff, destructive fishing practices, and coastal development exacerbate the problem, diminishing water quality and physically damaging reef structures. The combined impact of these pressures has resulted in a dramatic decline in coral cover worldwide, jeopardizing not only marine biodiversity but also the vital ecosystem services reefs provide – including coastal protection, fisheries support, and tourism revenue. Current rates of degradation suggest that without significant intervention, many coral reefs could effectively disappear within decades, triggering cascading effects throughout the marine environment and impacting human communities that depend on them.
Current coral restoration techniques, such as manual transplantation of coral fragments and the deployment of artificial reefs, represent significant conservation efforts, yet face inherent limitations. These methods are typically performed by divers and marine biologists – a process demanding substantial time, financial resources, and skilled labor. Consequently, restoration projects are often localized and struggle to address the vast scale of reef degradation occurring globally. The logistical challenges of working underwater, coupled with the need for careful coral husbandry, further restricts the number of coral colonies that can be effectively restored within a given timeframe. While valuable as localized interventions, these labor-intensive approaches are proving insufficient to counteract the accelerating decline of coral reefs facing escalating threats from warming oceans and pollution.
The escalating decline of coral reefs necessitates innovative approaches, and robotic technologies are emerging as pivotal tools for large-scale restoration. These aren’t simply automated versions of existing methods; instead, researchers are developing autonomous underwater vehicles (AUVs) capable of precision coral planting, micro-fragmentation to accelerate growth, and even targeted delivery of probiotics to enhance coral resilience. Beyond planting, robotic systems can continuously monitor reef health, identifying stressed colonies and mapping reef structures with unprecedented detail. This data-driven approach allows for adaptive management strategies, ensuring that restoration efforts are focused where they are most needed and maximizing the impact of limited resources. Ultimately, the integration of robotics promises to move coral reef restoration from a localized, labor-intensive process to a scalable, efficient, and ultimately, more hopeful endeavor for these critical ecosystems.
Generative Resilience: Designing for Delicate Interaction
ReefFlex is a generative design framework developed to produce end effectors for robotic manipulation of coral. The system employs topology optimization, an iterative process of material distribution based on load conditions, in conjunction with multi-objective optimization to simultaneously maximize performance criteria. This allows for the automated creation of end effector geometries specifically designed for grasping, without requiring pre-defined shapes or manual intervention. The framework’s output is a set of optimized designs balanced for structural stability and delicate interaction with fragile coral structures, facilitating automated handling and intervention tasks.
ReefFlex employs the Finite Element Method (FEM) to simulate the mechanical behavior of iteratively generated end effector designs. The Systematically Iterative Method of Progressive Identification (SIMP) algorithm is integrated with FEM to progressively refine the topology of these designs. SIMP operates by varying material densities within a design space, allowing the optimization process to effectively ‘grow’ or ‘remove’ material to meet specified performance criteria. Specifically, the framework balances opposing objectives: maximizing structural rigidity to withstand operational forces, and minimizing grasping force to prevent damage to fragile coral structures. The iterative process continues until an optimal design is achieved, satisfying both structural integrity and gentle grasping requirements as defined by the multi-objective optimization function.
Customized end effectors generated through ReefFlex address the challenges of coral manipulation by moving beyond standardized grasping tools. Coral structures exhibit significant variation in fragility, density, and geometry; a generalized gripper risks damage during interaction. ReefFlex designs are topology-optimized to specific coral models, enabling targeted force distribution and minimizing stress concentrations. This targeted approach reduces the likelihood of breakage or tissue damage, thereby demonstrably increasing successful handling rates during tasks such as coral transplantation, fragment collection, and laboratory analysis. The ability to tailor end effector characteristics – including stiffness, contact area, and grasping force – to individual coral specimens is a key factor in improving operational efficiency and conservation outcomes.
![Simulations and validations using a non-linear contact model demonstrate that optimized grippers exhibit superior shape adaptability and reduced stress during coral grasping compared to benchmark designs like the Fin Ray, effectively conforming to complex coral geometries as measured by changes in displacement [latex]F_{in3}[/latex] and contact force.](https://arxiv.org/html/2602.08285v1/images/ComsolVerification3.png)
Automated Aquaculture: A System Taking Root
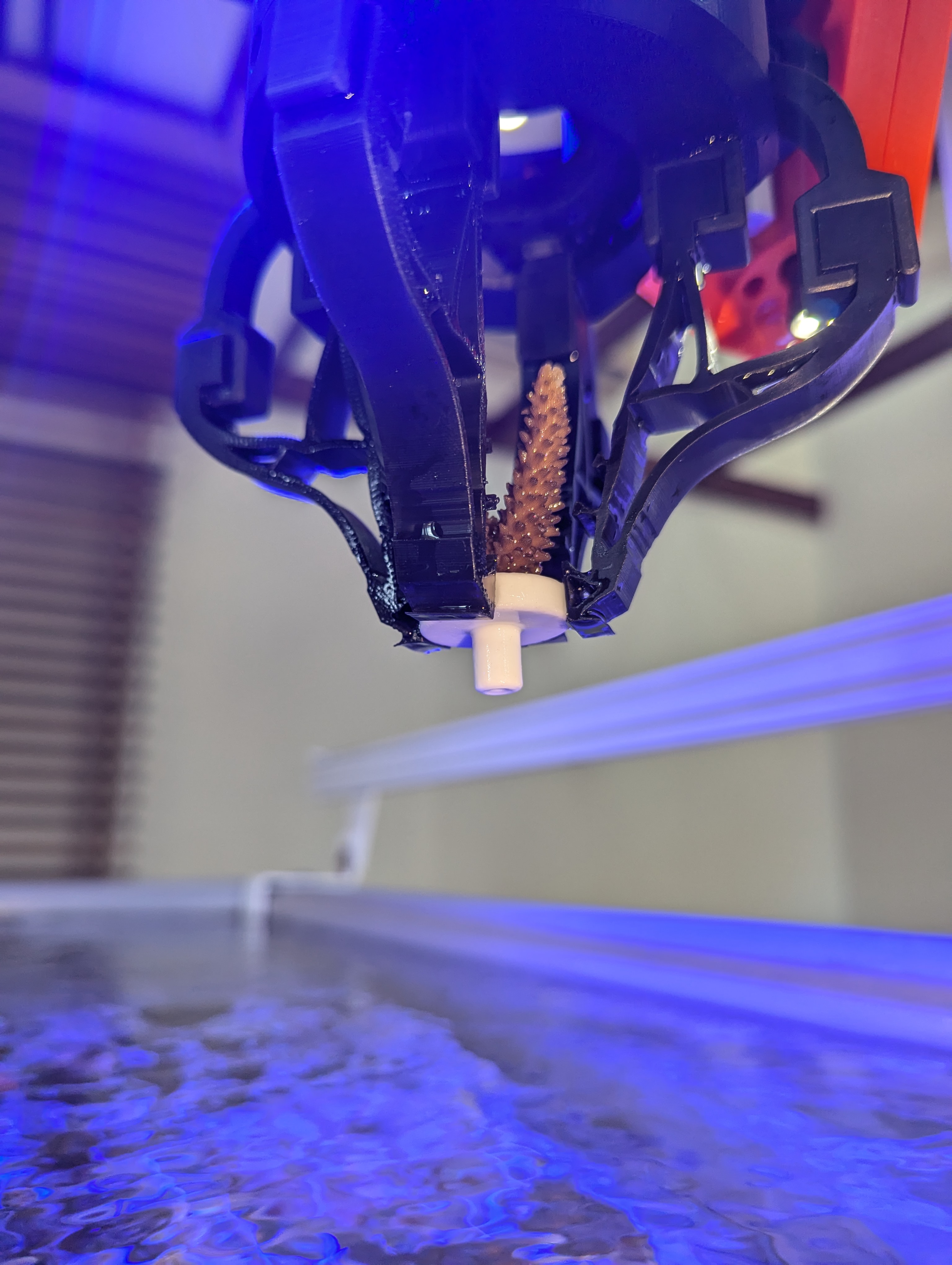
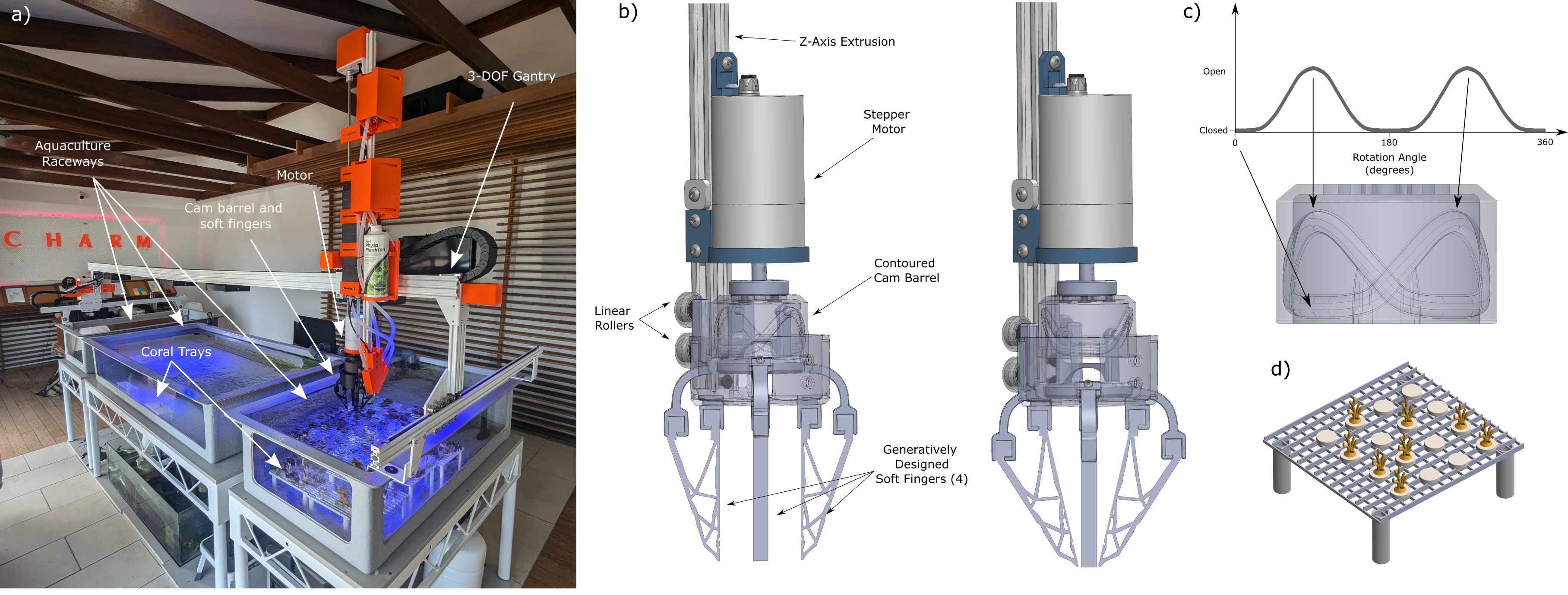
The CHARM system utilizes a Universal Robots UR10e robot arm coupled with a custom end effector designed by ReefFlex to create an automated platform for coral aquaculture. This integration allows for precise manipulation within a controlled environment, enabling tasks such as coral fragmentation, growth monitoring, and transplantation. The UR10e provides six degrees of freedom for movement, while the ReefFlex end effector is specifically engineered to handle the delicate structures of coral without causing damage. This robotic configuration facilitates scalable and repeatable processes critical for modern coral farming initiatives, moving beyond manual labor to increase efficiency and reduce operational costs.
The CHARM system utilizes two distinct finger designs to address the diverse physical characteristics of coral. Passive fingers, relying on compliant materials and pre-defined curvature, conform to coral shapes through static contact, providing stable support for delicate species. Active fingers incorporate small pneumatic actuators, allowing for controlled gripping force and adaptable manipulation of more robust coral structures. This dual-formulation approach enables the system to handle a wider range of coral morphologies-from branching to encrusting-without causing damage, optimizing both farming and transplantation procedures.
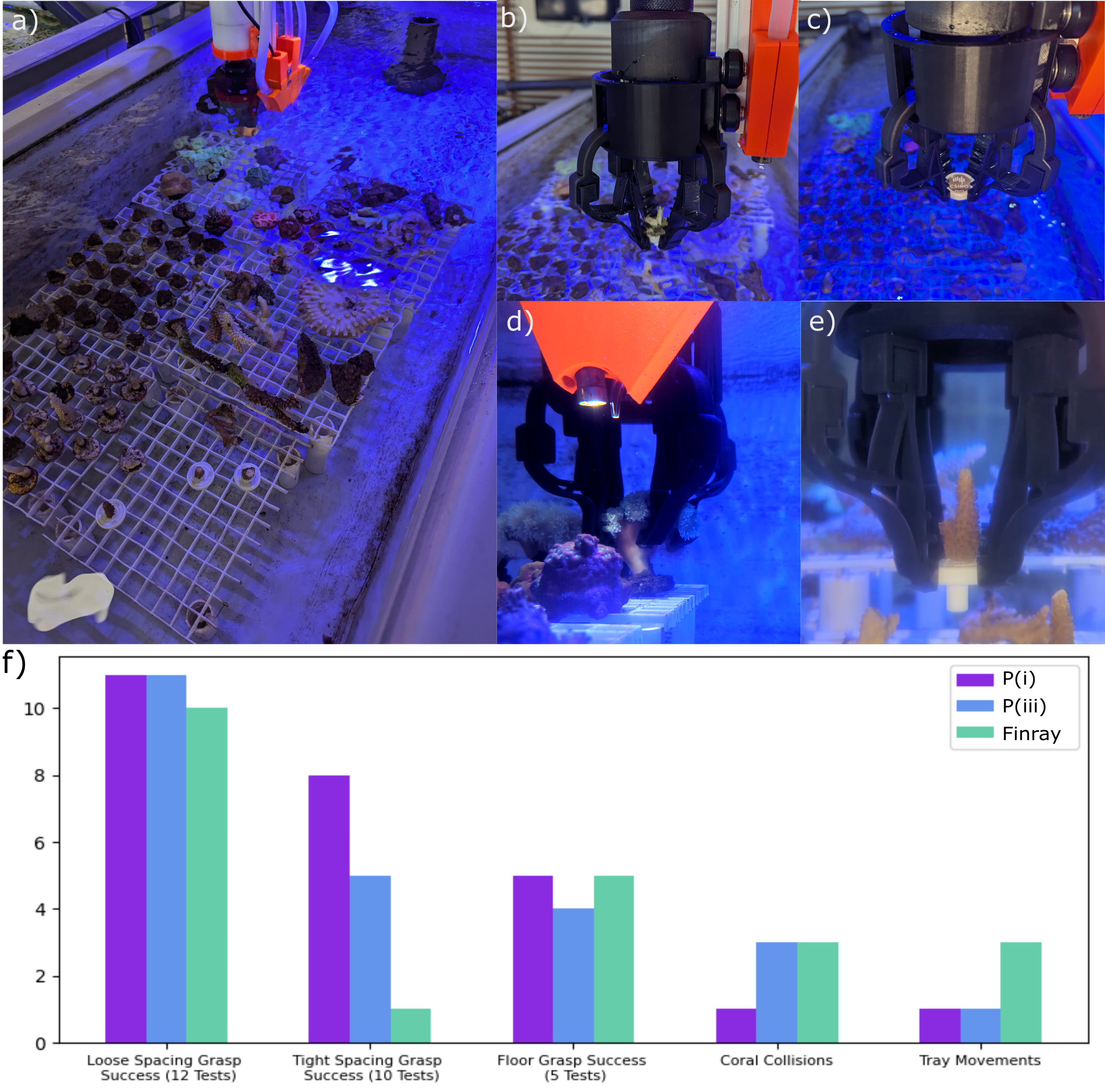
The CHARM system’s effectiveness was validated through successful coral grasping, a critical procedure for both aquaculture and reef restoration. In in-situ testing with tightly spaced coral plugs, the system achieved an 80% grasp success rate, demonstrating its ability to manipulate coral in a realistic environment. This performance indicates the system’s potential for automating key processes in coral farming and transplantation, improving efficiency and scalability for reef conservation efforts.

Benchmarking Resilience: The Inevitable Failure of Standards
A standardized Grasp Benchmarking Framework was developed to rigorously evaluate the performance of a robotic system designed for coral reef restoration. This framework moves beyond subjective assessments by quantifying both the success rate and durability of coral grasps – measuring not just if a coral plug is grasped, but how well it’s held under simulated environmental stressors. The system employs metrics to assess grip strength, resistance to dislodgement by currents, and the potential for coral damage during manipulation. By establishing an objective baseline for comparison, this framework facilitates iterative improvements in robotic end-effector design and control algorithms, ultimately paving the way for more effective and reliable automated reef restoration efforts.
Recent evaluations reveal a substantial performance advantage for the ReefFlex end effector in a critical task for coral reef restoration: grasping and manipulating coral fragments. Testing demonstrated an 80% success rate in securely grasping tightly spaced coral plugs, a significant improvement over the benchmark Fin Ray gripper, which achieved only 10%. This enhanced grasping capability is crucial for robotic systems intended to assist with coral transplantation, as it directly impacts the efficiency and scalability of restoration efforts. The substantial difference in performance suggests that the specifically designed flexibility and geometry of the ReefFlex end effector are well-suited to the delicate and precise manipulation required when handling fragile coral structures in complex reef environments.
The culmination of this robotic coral restoration research lies in transitioning the CHARM system from controlled laboratory environments to authentic reef ecosystems. Future endeavors prioritize field deployment, enabling the robot to operate autonomously within the complex underwater terrain. This necessitates integrating advanced navigation capabilities, allowing CHARM to map reef structures and plan efficient routes for coral transplantation. Crucially, the system’s manipulation skills will evolve to include adaptive grasping, responding in real-time to variations in coral size, shape, and fragility. Such advancements are projected to significantly enhance the scale and efficacy of reef restoration initiatives, offering a scalable solution to combat the ongoing degradation of these vital marine habitats.
The pursuit of automated solutions for delicate tasks, as demonstrated by ReefFlex, echoes a fundamental truth about complex systems. This framework doesn’t build grippers so much as cultivate them, leveraging generative design to yield structures suited to the unpredictable demands of handling fragile objects. It’s a recognition that perfect solutions are illusory; order is merely a temporary reprieve. As G. H. Hardy observed, “The essence of mathematics lies in its freedom.” This freedom, applied to robotic design, allows ReefFlex to explore a vast solution space, acknowledging that the most resilient system isn’t one devoid of failure, but one prepared to accommodate it. The topology optimization at the heart of ReefFlex doesn’t promise flawlessness, but rather, survivability.
The Turning of Tides
ReefFlex, like all attempts to formalize adaptation, offers a snapshot of stability in a fundamentally unstable domain. The framework excels at generating geometries suited to current understandings of fragility and grasping-but the reef itself does not pause to consult the optimization algorithm. Each successful grasp is, inevitably, a temporary truce with entropy. Future work will not be found in refining the topology, but in accepting the inevitability of failure and building systems that gracefully accommodate it. The true challenge lies not in creating a perfect gripper, but in orchestrating a dance between the artificial and the genuinely unpredictable.
The current emphasis on objective functions – maximizing grasp force, minimizing stress – feels, in retrospect, almost quaint. The reef does not optimize; it becomes. A more fruitful avenue of inquiry may be found in shifting from prescriptive design to cultivating emergent behavior. Perhaps the next iteration will not generate a gripper, but a substrate-a scaffold upon which grasping can evolve, adapting to unforeseen forms and vulnerabilities.
The promise of scalable reef restoration hinges on automating delicacy. Yet, automation always carries the scent of reduction. One suspects the most valuable outcome of ReefFlex will not be the number of coral fragments handled, but the humility it instills-a recognition that even the most sophisticated framework is merely a ripple in the vast, indifferent ocean of becoming.
Original article: https://arxiv.org/pdf/2602.08285.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Invincible Season 4 Episode 4 Release Date, Time, Where to Watch
- Physics Proved by AI: A New Era for Automated Reasoning
- American Idol vet Caleb Flynn in solitary confinement after being charged for allegedly murdering wife
- Gold Rate Forecast
- “Wild, brilliant, emotional”: 10 best dynasty drama series to watch on BBC, ITV, Netflix and more
- Seeing in the Dark: Event Cameras Guide Robots Through Low-Light Spaces
- Magicmon: World redeem codes and how to use them (March 2026)
- Total Football free codes and how to redeem them (March 2026)
- Simulating Humans to Build Better Robots
- eFootball 2026 is bringing the v5.3.1 update: What to expect and what’s coming
2026-02-11 02:45