Author: Denis Avetisyan
A new design leveraging spiral-shaped metamaterials allows for precise, tendon-driven control of both back-and-forth and one-way movements in soft robots.
Researchers demonstrate controlled motion via geometric instability in tendon-driven snapping metabeams, enabling both reciprocating and non-reciprocating actuation.
Achieving versatile and efficient actuation remains a challenge in soft robotics, often requiring complex control schemes. This is addressed in ‘Tendon-Driven Reciprocating and Non-Reciprocating Motion via Snapping Metabeams’, which presents a novel mechanism utilizing spiral-based metabeams to generate controlled motion through programmed geometric instability. The demonstrated system achieves both reciprocating and non-reciprocating actuation via tendon control, exhibiting speeds of up to [latex]81[/latex] mm/s in a swimming robot prototype. Could this approach to geometry-driven snapping structures unlock new possibilities for programmable and energy-efficient soft robotic systems?
The Inevitable Collapse: Beyond Conventional Actuation
Traditional robotic systems frequently depend on an array of electric motors, gears, and linkages to generate movement. This reliance introduces significant limitations, primarily due to the weight and volume of these components, which restrict agility and maneuverability. The complexity of these mechanisms also contributes to energy loss through friction and inefficiencies in power transmission. Furthermore, the intricate assembly and maintenance requirements of conventional actuators present practical challenges for creating lightweight, robust, and adaptable robots, particularly in applications demanding swift and precise movements within constrained spaces. This has spurred research into alternative actuation methods capable of achieving similar or greater performance with a reduced mechanical footprint.
Mechanical metamaterials are challenging conventional actuation systems by introducing structures engineered for dramatic, snapping motions. Unlike traditional robotics that depend on continuous motor operation and intricate linkages, these materials achieve powerful movement through programmed instability. A carefully designed metamaterial will accumulate elastic energy until a critical point is reached, triggering a rapid, large-scale deformation – a ‘snap’ – that can perform work. This approach promises significantly simplified robotic designs, reducing component count and weight while potentially increasing speed and force output. The key lies in tailoring the material’s geometry and properties to control when and how this snap occurs, opening possibilities for precise and repeatable actuation without the need for constant energy input.
Mechanical metamaterials exhibiting snapping behavior achieve substantial deformation through a carefully engineered instability, diverging from the gradual response of traditional materials. This isn’t a failure, but a feature – a programmed transition to a new, stable configuration triggered by a relatively small force. The core principle relies on structures designed to store energy when deformed, then release it rapidly via a buckling event, resulting in movements far exceeding the material’s elastic limits. This allows for the creation of actuators – devices that generate motion – with significantly simplified designs, potentially replacing complex motor systems and gearboxes. Such innovations could dramatically reshape robotic design, enabling the development of lighter, more efficient, and remarkably agile machines capable of performing complex tasks in confined spaces or dynamic environments. The potential extends beyond robotics, promising advancements in areas like soft robotics, deployable structures, and even biomedical devices.
The Geometry of Rupture: Designing the Double-Spiral Metabeam
The metabeam functions as the primary actuator within the system, consisting of a repeating structural unit engineered for predictable and controlled deformation through a buckling phenomenon known as snapping. This design leverages the inherent instability of the unit cell to transition between stable states with a discrete change in configuration. By precisely controlling the geometry and material properties of each repeating unit, the overall metabeam exhibits a programmed response to external stimuli. This allows for the conversion of energy into mechanical work via the snapping motion, enabling applications requiring precise and repeatable movements. The cumulative effect of these individual unit cell deformations defines the overall actuation behavior of the metabeam assembly.
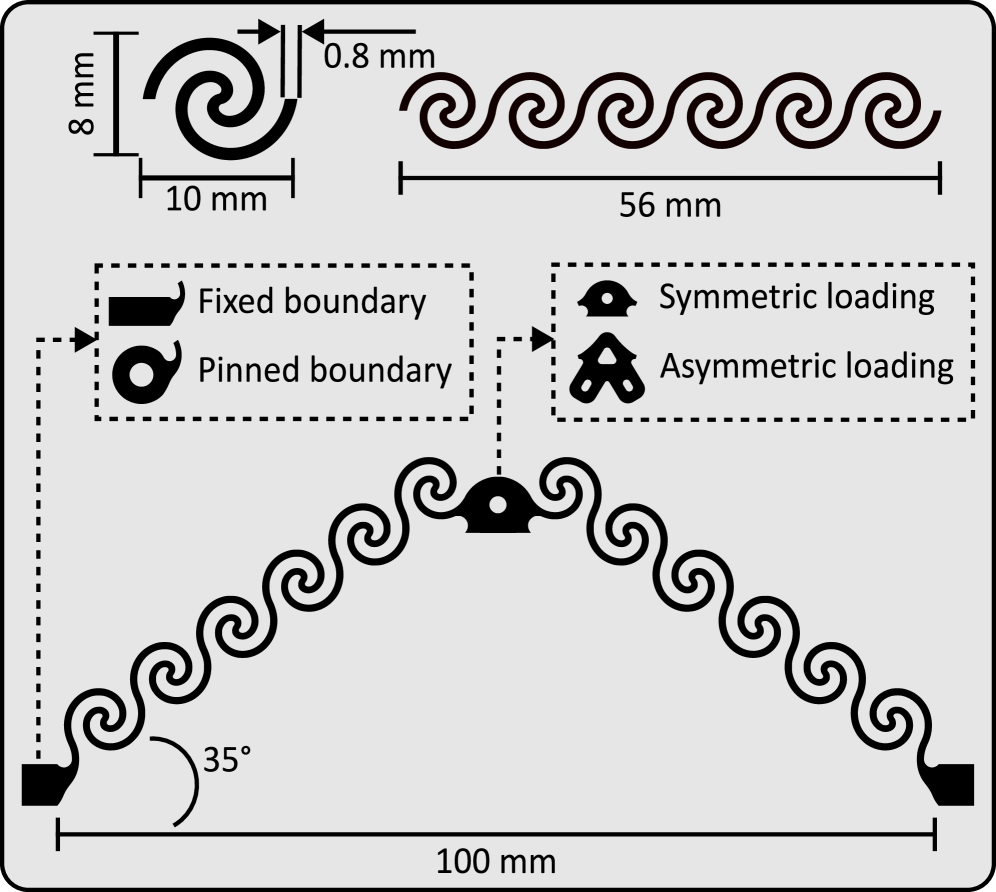
The double-spiral unit cell is a key element in achieving significant deformation and energy absorption within the metabeam structure. This cell utilizes two Archimedean spirals – geometric forms characterized by a constant rate of expansion from a central point – arranged in opposition. This configuration allows for large displacements under load, as the spirals unwind and extend. The Archimedean spiral’s specific geometry distributes stress more evenly than simpler curves, preventing localized failure and maximizing the amount of energy the structure can absorb before permanent deformation or fracture. The opposing arrangement of the spirals further enhances stability during the deformation process and contributes to predictable snapping behavior.
Computational modeling software, typically utilizing finite element analysis (FEA), is employed to define the precise geometric parameters of the double-spiral unit cells. These parameters include spiral arm length, width, thickness, and the angle of curvature, all of which directly influence the force required for buckling and the resulting displacement. The software allows iterative design optimization, enabling engineers to specify desired snapping thresholds and energy absorption capacities. By simulating the mechanical response to various loads, designers can tailor the unit cell geometry to achieve specific actuation characteristics and ensure structural integrity under anticipated operational conditions. Precise control over these geometric variables is critical for achieving repeatable and predictable performance in the metabeam system.
The Anatomy of a Collapse: Characterizing Snapping Behavior
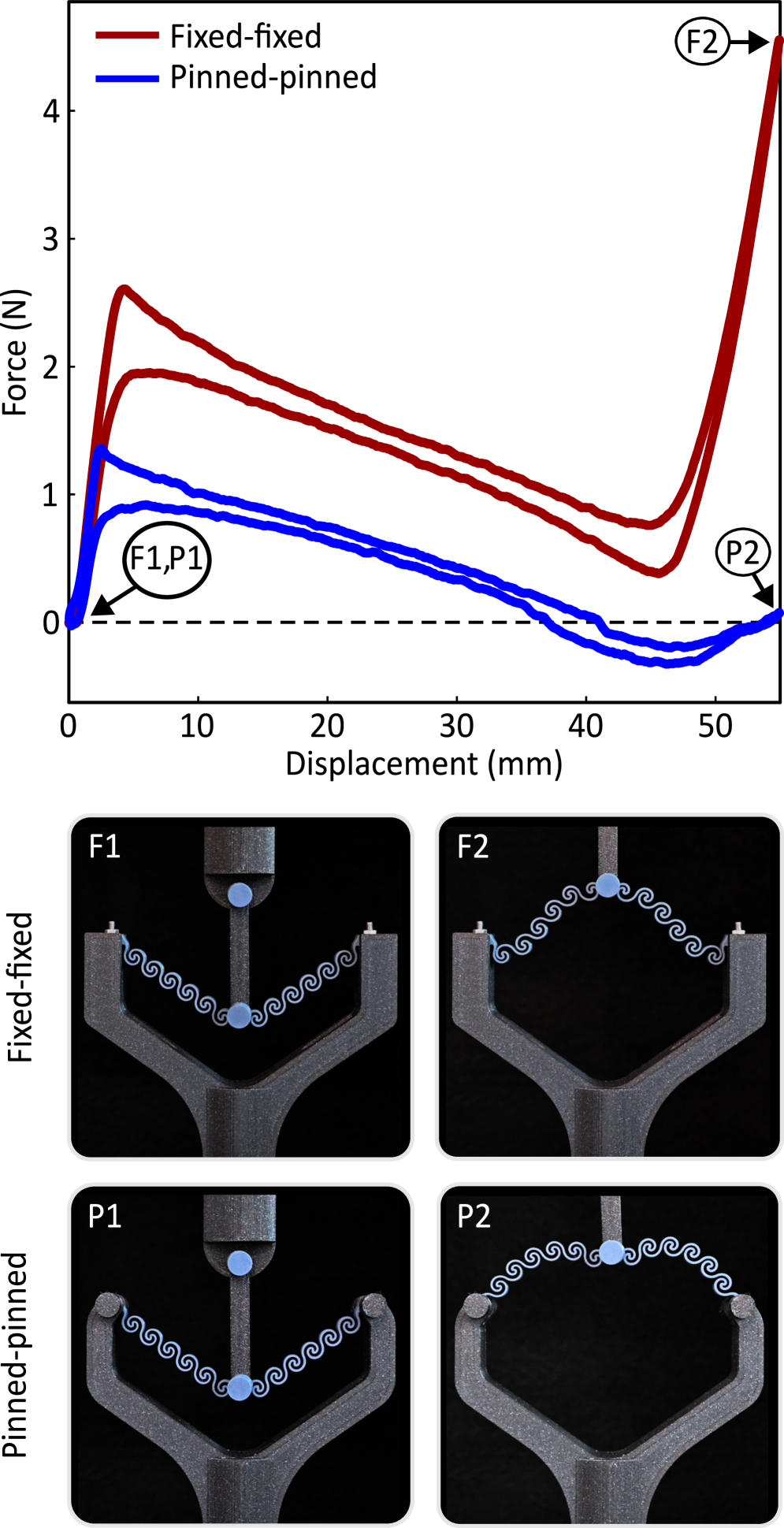
Tensile loading of the metabeam was performed using a ZwickiLine universal testing machine to characterize its snapping behavior. This method involved applying a uniaxial tensile force to the structure and recording the resulting displacement. The data acquired was used to generate force-displacement curves, which detail the relationship between applied force and structural deformation. These curves are essential for identifying the force at which the snapping response is initiated and for quantifying the energy absorbed during the process. The testing machine’s precise force and displacement measurements provide quantitative data for analyzing the metabeam’s mechanical behavior under tensile stress.
Quantitative analysis of the metabeam’s structural response indicates a significant correlation between support conditions and the force required to initiate the snapping instability. Specifically, the critical force for snapping initiation was determined to be 2.74 ± 0.32 Newtons when the metabeam was configured with fixed-fixed supports. Conversely, a pinned-pinned support configuration resulted in a substantially lower critical force of 1.24 ± 0.14 Newtons. This difference demonstrates that restricting rotational and translational freedom at the supports increases the energy required to overcome the initial elastic deformation and trigger the snapping behavior.
Trajectory analysis was performed to quantitatively assess the dynamic behavior of the metabeam during both loading and unloading phases. This involved high-speed imaging of the structure’s deformation, with the position of key points tracked using the OpenCV library. The resulting data enabled the reconstruction of the structure’s motion path, providing insights into the speed and magnitude of displacement during the snapping process. This method facilitates precise measurement of kinematic variables, such as velocity and acceleration, which are crucial for understanding the energy dissipation mechanisms and validating numerical models.
Energy dissipation ratios were quantified for both fixed-fixed and pinned-pinned metabeam configurations during snapping experiments. The fixed-fixed configuration exhibited a dissipation ratio of 0.18 ± 0.03, while the pinned-pinned configuration demonstrated a slightly higher ratio of 0.22 ± 0.03. These values represent the proportion of input energy lost to hysteresis during the loading and unloading cycle, and indicate a substantial degree of energy transfer within the structure despite the rapid, buckling-based deformation.
[/latex].](https://arxiv.org/html/2602.18330v1/x3.png)
The Inevitable Machine: A Snapping-Beam Swimming Robot
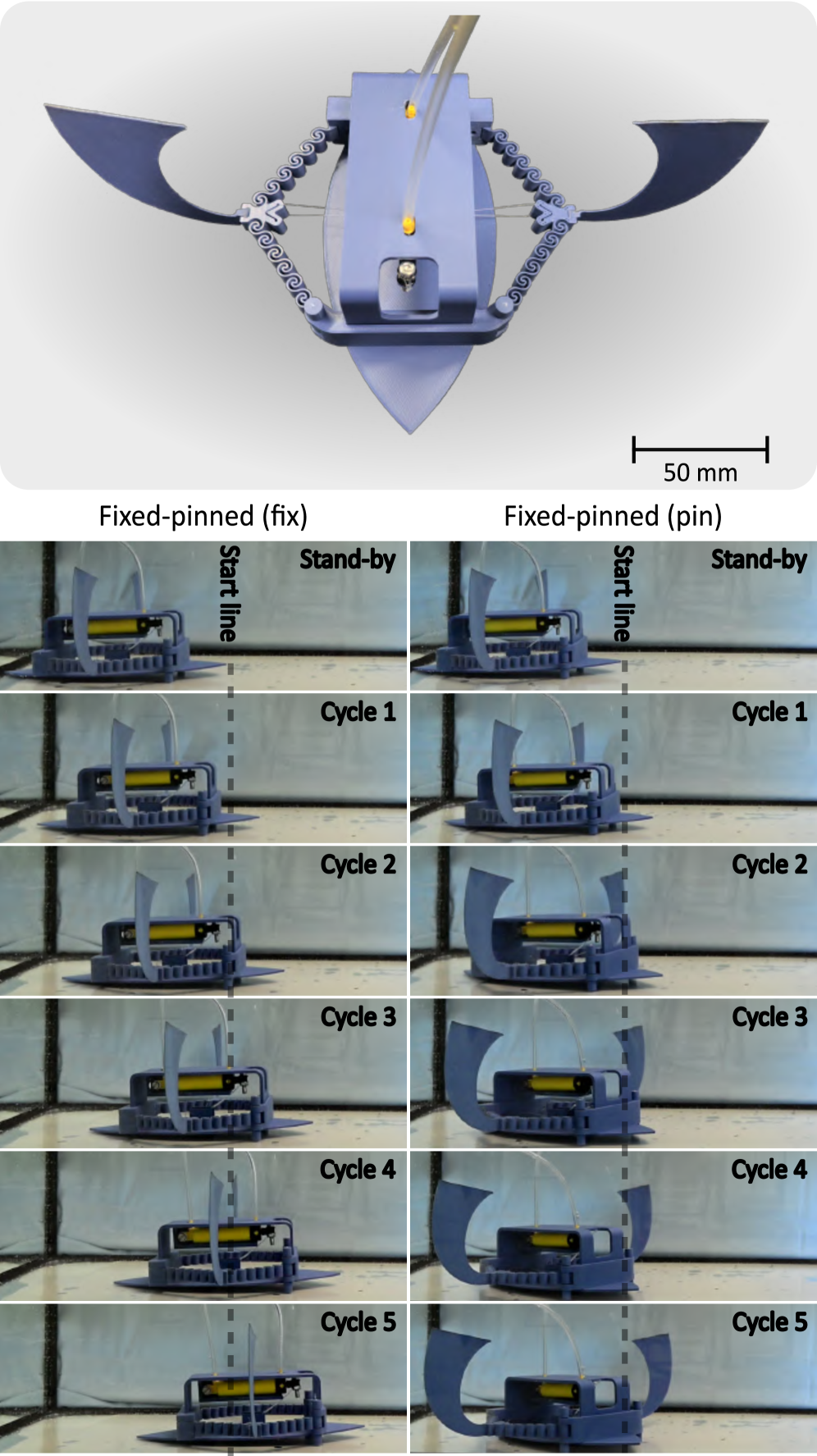
The swimming robot’s core functionality stems from a specifically designed metabeam, functioning as its primary actuator. This innovative component utilizes principles of mechanical metamaterials to achieve efficient and controlled movement through fluid environments. Unlike traditional propulsion systems, the metabeam’s architecture allows for the conversion of input energy – in this case, pneumatic pressure – into directed force for swimming. Its unique design facilitates bending and flexing motions, enabling the robot to generate propulsive waves without the need for complex motor systems or rigid appendages. This approach not only simplifies the robot’s construction but also offers potential advantages in terms of maneuverability and adaptability in various underwater conditions, positioning the metabeam as a crucial element in the advancement of bio-inspired robotic locomotion.
The robot’s swimming action hinges on a cleverly designed actuation system where a pneumatic actuator precisely manipulates tendons, initiating a rhythmic cycle of pull and release. This isn’t a smooth, continuous motion; instead, the tendons rapidly load and then abruptly release a flexible beam, causing it to “snap” forward. This snapping action is the primary driver of propulsion, converting pneumatic pressure into kinetic energy. The cyclical nature of this pull-release sequence allows for repeated snapping events, generating a sustained propulsive force and enabling the robot to navigate through fluid environments. The efficiency of this system relies on the beam’s ability to store energy during the pull phase and then quickly release it during the snap, effectively translating input energy into directed movement.
The swimming robot achieves forward movement not through simple back-and-forth motion, but via a sophisticated interplay of reciprocating and potentially non-reciprocating dynamics within its metabeam structure. This allows for a nuanced control of energy release and directional thrust, resulting in an impressive average speed of 81 mm/s when operating in the fixed-pinned (fix) configuration. Notably, this represents a substantial performance gain compared to the fixed-pinned (pin) mode, which only achieves 9.61 mm/s. The disparity in speed underscores the critical role of the metabeam’s design in maximizing propulsive efficiency and demonstrates a pathway towards more agile and effective underwater robotic locomotion.
The swimming robot’s efficiency stems, in part, from an energy-trapping mechanism inherent in its design; when subjected to loading forces, the pinned-pinned configuration of the metabeam demonstrably retained approximately 13% of the input energy. This isn’t simply stored as potential energy, but rather contributes directly to the subsequent propulsive stroke. By temporarily ‘capturing’ this energy during the loading phase, the system reduces energy loss and enhances the overall conversion of input – pneumatic pressure – into forward motion. This nuanced interaction between loading and release is critical, as it allows the robot to achieve notable speeds, highlighting the benefits of this specific structural configuration for underwater locomotion.
The Horizon of Instability: Future Directions in Snapping Metamaterial Robotics
The newly demonstrated snapping-beam mechanism presents a compelling foundation for robotic systems across diverse scales and functionalities. This approach leverages the inherent instability of carefully designed structures to achieve rapid, energy-efficient movements, making it particularly well-suited for micro-robotics where traditional actuators are often bulky and power-hungry. Beyond miniaturization, the platform’s adaptability extends to assistive devices; the snapping motion can be harnessed to create lightweight, responsive exoskeletons or prosthetic limbs capable of providing significant force with minimal energy input. Researchers envision future iterations incorporating multiple snapping beams to enable more complex gaits and manipulations, ultimately paving the way for robots that are not only nimble and efficient but also capable of navigating challenging environments and providing meaningful assistance to humans.
Ongoing research prioritizes tailoring metabeam geometries to excel in designated applications, moving beyond generalized demonstrations. This involves computationally intensive modeling and iterative fabrication to refine beam arrangements and material properties for optimal performance in tasks like targeted drug delivery or precision assembly. Simultaneously, developers are integrating sophisticated control algorithms – including machine learning approaches – to manage the complex, nonlinear dynamics inherent in snapping mechanisms. Such algorithms will enable precise, repeatable movements and adaptive responses to external stimuli, effectively transforming these passively triggered structures into actively controllable robotic components capable of navigating intricate environments and executing nuanced maneuvers.
The development of snapping metabeam robotics presents a compelling pathway towards a new generation of robotic systems distinguished by minimized mass and maximized operational efficiency. Traditional robotics often relies on bulky actuators and continuous-motion mechanisms, leading to substantial energy consumption; however, these metabeams leverage stored elastic energy and discrete, snap-through buckling to achieve movement, dramatically reducing the need for constant power input. This inherent efficiency, coupled with the potential for miniaturization offered by metamaterial design, unlocks possibilities for robots capable of intricate maneuvers in constrained environments – envision micro-robots navigating within the human body for targeted drug delivery or lightweight assistive devices providing nuanced support with minimal exertion. Further refinement of these designs promises robots that are not only agile and responsive but also remarkably energy-conscious, representing a significant step toward sustainable and versatile robotic technologies.
The pursuit of motion via snapping metabeams reveals a fundamental truth: systems aren’t engineered, they emerge. This research, detailing tendon-driven actuation through programmed geometric instability, isn’t about imposing control, but about coaxing forth behavior. It’s a demonstration that true resilience begins where certainty ends, accepting that the path to non-reciprocating and reciprocating movement lies not in rigid predetermination, but in embracing the inherent unpredictability of a carefully sculpted instability. As Brian Kernighan observed, “Debugging is twice as hard as writing the code in the first place. Therefore, if you write the code as cleverly as possible, you are, by definition, not smart enough to debug it.” This echoes within the work; the ‘cleverness’ isn’t in preventing snapping, but in orchestrating it.
The Loom’s Imperfection
This work, demonstrating motion through deliberately courted instability, reveals less a solution and more a postponement. Each elegant spiral, each carefully tuned tendon, merely delays the inevitable drift toward unpredictable states. The system doesn’t avoid decay-it choreographs it. Future iterations will not focus on achieving finer control, but on accepting, and perhaps even leveraging, the inherent untrustworthiness of these mechanisms. The question isn’t “how do we stabilize this?” but “how does it fail, and what useful behavior emerges from that failure?”
The reliance on precise fabrication-the flawless curves, the consistent material properties-is the most fragile link. Real-world deployment will demand a reckoning with imperfection. Expect to see explorations into self-correcting geometries, systems that adapt to material flaws not by eliminating them, but by incorporating them into the actuation logic. The pursuit of ‘robustness’ is a fool’s errand; the path lies in designing for graceful degradation.
Ultimately, this is not about building machines, but about cultivating ecosystems of stress. The true challenge isn’t achieving specific motions, but creating systems capable of evolving them. Each tendon, each beam, is merely a seed; the interesting behavior will blossom from the unpredictable interactions within the system, long after the designer’s intentions have faded.
Original article: https://arxiv.org/pdf/2602.18330.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Limbus Company 2026 Roadmap Revealed
- After THAT A Woman of Substance cliffhanger, here’s what will happen in a second season
- Total Football free codes and how to redeem them (March 2026)
- XO, Kitty season 3 soundtrack: The songs you may recognise from the Netflix show
- Guild of Monster Girls redeem codes and how to use them (April 2026)
- ‘Project Hail Mary’s Unexpected Post-Credits Scene Is Worth Sticking Around
- The Division Resurgence Specializations Guide: Best Specialization for Beginners
- Wuthering Waves Hiyuki Build Guide: Why should you pull, pre-farm, best build, and more
- Gold Rate Forecast
- ‘Project Hail Mary’s Soundtrack: Every Song & When It Plays
2026-02-23 14:23