Author: Denis Avetisyan
Researchers have developed a novel motion planning system that allows robots to navigate complex home environments with increased speed, safety, and reliability.
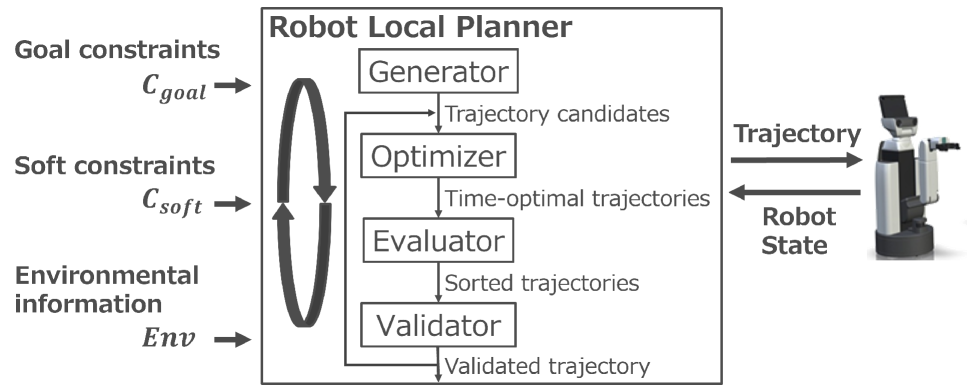
This paper introduces the Robot Local Planner (RLP), a periodic sampling-based method for whole-body trajectory planning that minimizes waypoints and enhances robustness in dynamic home environments.
Efficient and robust manipulation in dynamic home environments remains a significant challenge for robotics. This paper introduces the ‘Robot Local Planner: A Periodic Sampling-Based Motion Planner with Minimal Waypoints for Home Environments’, a novel trajectory planning method designed to address this limitation. By leveraging periodic replanning with minimal waypoints, the proposed approach achieves substantial improvements in planning speed, motion optimality, and robustness against sensing and control errors. Could this method pave the way for more adaptable and reliable robotic assistants in everyday living spaces?
Navigating Complexity: The Challenge of Dynamic Environments
Robot motion planning in everyday home environments presents a substantial computational challenge due to the inherent complexity of these spaces. Unlike the controlled conditions of factory floors, homes are rarely organized or predictable, filled with furniture, narrow passageways, and a constant potential for disarray. Traditional algorithms, designed for simpler scenarios, often require excessive processing time to map these cluttered spaces and calculate collision-free paths. The sheer number of possible trajectories that a robot must evaluate – considering every object and potential obstacle – quickly becomes overwhelming, even for powerful computing hardware. This computational burden limits a robot’s ability to respond quickly to changing circumstances or to plan efficiently in real-time, hindering its practical application in dynamic, unstructured home settings.
Conventional robotic navigation systems often construct and utilize static maps of their surroundings, a methodology that presents significant challenges when operating in real-world environments. These pre-built maps assume a fixed world, proving inadequate when confronted with dynamic obstacles – moving people, pets, or even repositioned furniture. Consequently, a robot relying on such a static representation may attempt to follow a pre-calculated path directly through an obstruction, leading to planning failures and necessitating complete re-computation of a route. This limitation underscores a critical need for systems capable of perceiving and reacting to environmental changes in real-time, rather than solely relying on a frozen snapshot of the world, to ensure robust and reliable operation.
The capacity for swift adaptation is paramount for robots navigating unpredictable spaces; current motion planning systems often falter when confronted with unanticipated obstacles or alterations to the environment. This limitation stems from the computational demands of recalculating an entirely new path from scratch each time a change is detected, creating delays that can compromise a robot’s functionality-and even its safety-in dynamic settings. Efficient replanning isn’t simply about speed; it requires algorithms capable of intelligently incorporating new information without discarding previously computed, still-valid portions of a trajectory. Without this capability, robots risk collisions, stalled operations, or the inability to complete tasks in the ever-changing complexity of real-world environments, highlighting a critical need for more responsive and adaptable navigational strategies.

Constructing a Pathway: A Sampling-Based Foundation for Whole-Body Planning
Sampling-based motion planning algorithms, such as Rapidly-exploring Random Trees (RRT) and RRT-Connect, efficiently navigate a robot’s configuration space by randomly sampling points and incrementally building a tree-like structure. RRT operates by constructing a tree rooted at the robot’s initial state, extending it towards randomly sampled configurations until a feasible path to the goal is found. RRT-Connect improves upon this by simultaneously growing two trees – one from the initial state and another from the goal state – increasing the probability of rapid path discovery. These methods are particularly effective in high-dimensional configuration spaces, avoiding the computational cost of traditional search-based planners by probabilistically exploring only the most promising regions.
Whole-body trajectory planning extends sampling-based methods to coordinate the movements of a robot’s base and arm(s) simultaneously. This contrasts with traditional arm-only planning which assumes a fixed base position. By treating the base and arm joints as a unified configuration space, the system can generate trajectories that consider the interaction between base locomotion and arm manipulation. This coordinated approach is essential for complex manipulation tasks such as rearranging objects while navigating obstacles, performing assembly operations in constrained spaces, or maintaining balance during dynamic movements. The resulting trajectories specify time-parameterized joint angles for both the base and arm, enabling the robot to perform a wider range of tasks and operate in more challenging environments.
Inverse Kinematics (IK) serves as a fundamental component of the trajectory generation process by calculating the required joint angles of a robotic manipulator to achieve a specified Cartesian pose – position and orientation – of its end-effector. This computation efficiently translates high-level task specifications, defined in terms of end-effector goals, into low-level control commands for the robot’s actuators. The IK solver utilizes the robot’s kinematic structure and parameters to determine a feasible joint configuration, or multiple configurations, that satisfy the desired end-effector pose. Iterative numerical methods are commonly employed to solve the non-linear IK equations, and solutions are often constrained by joint limits and collision avoidance considerations to ensure safe and valid robot motion.

Refining the Course: Optimizing Trajectories for Robust Performance
Motion-optimization-based planning techniques, specifically CHOMP (Covariant Hamiltonian Optimization for Motion Planning) and STOMP (Stochastic Trajectory Optimization for Motion Planning), are utilized to improve trajectories initially generated through sampling methods. These techniques function by iteratively refining the trajectory to minimize a defined cost function. The cost function typically incorporates terms related to trajectory smoothness – minimizing jerks and accelerations – and obstacle proximity, ensuring a safe and efficient path. CHOMP achieves this through a quadratic program solving for small trajectory updates, while STOMP employs a first-order optimization method with added noise to explore the search space and avoid local minima. Both methods aim to reduce the overall cost, resulting in trajectories that are both kinematically feasible and optimized for performance and safety.
TrajOpt is a trajectory optimization framework utilized to refine robot motion plans beyond initial sampling and smoothing. It operates by defining a cost function that encapsulates task-specific requirements, such as minimizing execution time, maximizing clearance from obstacles, or achieving a desired end-effector orientation. This cost function, combined with kinematic and dynamic constraints, is then minimized using numerical optimization techniques – typically sequential quadratic programming (SQP). The framework allows for the inclusion of both equality and inequality constraints, enabling precise control over the trajectory and ensuring it adheres to all specified limitations. Critically, TrajOpt facilitates the incorporation of custom cost terms, enabling adaptation to a wide variety of robotic tasks and environments.
Robust Inverse Kinematics (IK) is implemented to improve trajectory reliability by minimizing sensitivity to errors in the base position. This is achieved by utilizing the Manipulability metric – a Jacobian-based measure of how easily a robot end-effector can be moved in different directions – during IK solution generation. Specifically, the optimization process prioritizes solutions with high Manipulability, resulting in configurations where small base position deviations have a reduced impact on end-effector accuracy. This approach effectively increases the system’s tolerance to external disturbances and modeling inaccuracies, ensuring consistent performance even with slight discrepancies between the planned and actual robot base position.
Responding to Change: Adapting to Dynamic Changes with Efficient Re-planning
The robotic system’s ability to navigate dynamic environments hinges on a sophisticated approach to path planning, seamlessly integrating Straight-Line Trajectory and Three-Point Trajectory methods. This combination allows for remarkably swift adaptation when unexpected obstacles appear or the environment undergoes change; the system can instantly assess the new situation and generate an alternative path. Straight-Line Trajectories facilitate rapid initial responses for clear spaces, while the more adaptable Three-Point Trajectories excel at maneuvering around complex or newly-detected obstructions. By dynamically switching between these approaches, the system avoids the computational bottlenecks often associated with replanning, ensuring continuous and efficient navigation even in challenging and unpredictable settings.
The robotic system achieves efficient navigation through a sophisticated approach to path re-planning, seamlessly integrating optimized trajectories with rapid response to dynamic changes. Instead of recalculating a path from scratch when encountering an obstacle or altered environment, the system leverages pre-computed, optimized movements as building blocks. This allows the robot to quickly adapt by modifying existing trajectories, rather than generating entirely new ones, thereby minimizing computational demands and significantly reducing the time required to replan. The result is a fluid and responsive navigation capability, enabling the robot to maintain progress even in complex and unpredictable surroundings, and ultimately boosting overall task completion rates.
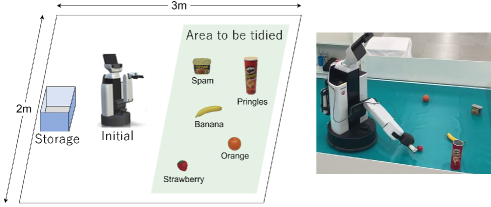
The newly developed Robot Local Planner (RLP) exhibits a marked improvement in navigational efficiency, consistently completing trajectories faster than established algorithms like AIT* and CBiRRT2. Rigorous testing demonstrates the RLP achieves a greater than 99% motion completion rate, signifying a substantial leap in reliability and robustness. This performance extends to complex scenarios, as evidenced by the RLP surpassing the performance of the winning system from the WRS 2020 competition in the challenging Tidy-up Task, indicating a capacity for practical application and advanced problem-solving in dynamic environments.
The Robot Local Planner (RLP) demonstrated a substantial advancement in navigational reliability, achieving a motion completion rate exceeding 99%. This performance stands in stark contrast to that of MπNets, a comparative system which only managed a 56.9% completion rate under identical conditions. This significant disparity highlights the RLP’s robust ability to successfully navigate complex environments and consistently reach designated goals, indicating a marked improvement in path planning and obstacle avoidance capabilities. The RLP’s success suggests a considerable step forward in creating robots capable of dependable autonomous operation, even in challenging and unpredictable settings.
Looking Ahead: Towards Proactive Replanning
Advancements in robotic navigation are increasingly focused on preemptive action, and a critical component of this lies in the ability to foresee environmental changes. By integrating robust object tracking – exemplified by techniques like XMem++ which excel at maintaining object identities across complex scenes – robots can move beyond reactive replanning to truly proactive navigation. This means anticipating the future positions of dynamic obstacles, such as pedestrians or moving vehicles, and adjusting trajectories before a collision becomes imminent. Such systems don’t simply respond to detected changes; they leverage predicted movements, allowing for smoother, more efficient, and significantly safer operation in bustling, unpredictable environments. This predictive capability is a key step towards robots that seamlessly integrate into and navigate human-populated spaces with genuine autonomy.
Adaptively Informed Trees represent a significant advancement in path planning by moving beyond static heuristics to those learned directly from experience. This approach allows a robot to build a search tree-a branching diagram of possible paths-with a bias towards areas previously found to be successful, dramatically reducing the computational effort needed to find optimal routes. Unlike traditional methods that rely on pre-defined cost functions, these trees dynamically adjust their exploration strategy based on accumulated knowledge of the environment, effectively ‘learning’ which paths are more likely to lead to the goal. The system achieves this through a process of iteratively refining the tree’s branching probabilities, favoring regions that have yielded positive results in past searches – resulting in faster, more efficient navigation, particularly within complex and ever-changing landscapes.
The progression beyond reactive robotics hinges on a robot’s capacity to foresee environmental changes and adjust its plans accordingly. Current systems largely respond to obstacles after they appear, often requiring abrupt course corrections or even complete replanning. However, the integration of predictive capabilities-such as tracking moving objects and learning typical environmental behaviors-allows robots to proactively anticipate potential disruptions. This shift from reaction to anticipation isn’t merely about speed; it’s about establishing a level of operational smoothness and reliability crucial for deployment in complex, dynamic environments like warehouses, hospitals, or even domestic settings. A robot capable of predicting and preparing for changes will navigate with greater efficiency, minimize the risk of collisions, and ultimately achieve truly autonomous operation, functioning not as a programmed machine, but as a dependable and adaptable agent.
The Robot Local Planner, as detailed in this work, embodies a holistic approach to navigation, recognizing that efficient motion isn’t solely about calculating a path, but about continuous adaptation. This resonates with Claude Shannon’s assertion: “The most important thing in communication is to avoid ambiguity.” Just as clear communication demands precision, the RLP’s periodic replanning minimizes uncertainty in dynamic home environments. The system’s robustness isn’t achieved through complex algorithms, but through a simplified, iterative process – a testament to the idea that elegant solutions often stem from fundamental principles. The focus on minimal waypoints further underscores this, prioritizing clarity and efficiency in the robot’s actions.
Looking Ahead
The presented work, while demonstrating a functional approach to local planning, merely scratches the surface of truly robust robotic behavior. The emphasis on periodic replanning, while pragmatic, hints at a deeper truth: current systems still largely react to environments, rather than anticipating them. A genuinely elegant solution will not require constant correction, but rather an inherent understanding of spatial relationships and dynamic constraints – a system that flows with the environment, not fights against it.
Future effort should not focus solely on refining sampling techniques, however efficient. The core limitation remains the representation of ‘home environments’ themselves. These spaces are not static collections of obstacles, but rather arenas of probabilistic human activity. Integrating predictive models of human behavior, even rudimentary ones, will be crucial. If a design feels clever – relying on intricate algorithms to compensate for a poor understanding of the world – it is probably fragile.
Ultimately, the path forward lies in embracing simplicity. A robot that navigates a home effectively does so not through computational brute force, but through an intuitive grasp of spatial logic. The challenge, then, is not to build more complex planners, but to discover the minimal sufficient conditions for intelligent, adaptive behavior. The simplest explanation is almost always the right one, even – perhaps especially – in robotics.
Original article: https://arxiv.org/pdf/2602.20645.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Limbus Company 2026 Roadmap Revealed
- After THAT A Woman of Substance cliffhanger, here’s what will happen in a second season
- Gold Rate Forecast
- Wuthering Waves Hiyuki Build Guide: Why should you pull, pre-farm, best build, and more
- XO, Kitty season 3 soundtrack: The songs you may recognise from the Netflix show
- Guild of Monster Girls redeem codes and how to use them (April 2026)
- Total Football free codes and how to redeem them (March 2026)
- The Division Resurgence Specializations Guide: Best Specialization for Beginners
- GearPaw Defenders redeem codes and how to use them (April 2026)
- Genshin Impact Version 6.5 Leaks: List of Upcoming banners, Maps, Endgame updates and more
2026-02-26 06:31