Author: Denis Avetisyan
A new simulation framework uses AI to optimize exoskeleton control, potentially streamlining development and personalization for a wider range of users.
Researchers present Exo-plore, a deep reinforcement learning-based system for adapting exoskeleton assistance to both healthy gaits and those affected by pathological conditions.
Optimizing exoskeleton assistance presents a paradox: effective control requires extensive human testing, yet those who would benefit most are often unable to participate in such demanding procedures. To address this challenge, we introduce ‘Exo-Plore: Exploring Exoskeleton Control Space through Human-aligned Simulation’, a novel framework combining neuromechanical simulation and deep reinforcement learning to optimize hip exoskeleton controllers without relying on real-world human trials. This approach successfully generates realistic gait data, achieves reliable optimization despite inherent gait variability, and demonstrates a strong correlation between pathology severity and optimal assistance levels. Could this simulation-based methodology unlock truly personalized and adaptive exoskeleton control strategies for a wider range of users?
The Illusion of Independence: Why We Chase Assistive Tech
The capacity for independent movement is inextricably linked to an individual’s quality of life, yet this fundamental ability frequently declines due to the natural processes of aging or the unforeseen impact of injury. This reduction in mobility isn’t merely a physical limitation; it often leads to decreased social interaction, psychological distress, and an increased reliance on others for daily tasks. Consequently, there’s a growing and critical need for effective assistive devices – technologies designed to restore or enhance movement capabilities. These devices aim to not only mitigate the physical challenges posed by limited mobility, but also to empower individuals to maintain their independence, participate fully in society, and experience a higher overall quality of life. The development of such technologies represents a significant opportunity to address a widespread and increasingly prevalent challenge facing populations worldwide.
The promise of exoskeleton technology – to restore or enhance human movement – is currently tempered by significant hurdles in achieving nuanced control and personalized adaptation. These devices, while mechanically capable, struggle to seamlessly integrate with the complex, individual nature of human gait. Each person’s walking style – their unique cadence, stride length, and subtle weight shifts – presents a challenge for pre-programmed assistance. Truly effective exoskeletons require sophisticated control algorithms that can not only react to a user’s intended movements, but also learn and adapt to their specific biomechanics, effectively becoming an extension of the body rather than a rigid, hindering apparatus. Overcoming this necessitates advancements in sensor technology, machine learning, and real-time control systems capable of deciphering and responding to the body’s intricate language of motion.
Existing exoskeleton control systems frequently rely on pre-programmed assistance profiles, which represent a significant limitation in achieving fluid, human-like movement. These profiles typically apply a fixed level of support based on generalized movement phases, failing to account for the subtle, individual variations in a person’s gait – differences stemming from factors like body weight, muscle strength, or even momentary fatigue. Consequently, users often experience a jerky, unnatural sensation, requiring considerable cognitive effort to override the device’s assistance and maintain balance. This lack of adaptability not only hinders the efficiency of movement but also increases energy expenditure for the wearer, effectively negating many of the potential benefits of exoskeleton technology. Researchers are actively exploring more sophisticated control strategies, including machine learning algorithms, to enable exoskeletons to dynamically adjust assistance levels in real-time, mirroring the nuanced support provided by natural biomechanics and ultimately restoring a more intuitive and effortless experience of mobility.
Exo-plore: Automating the Illusion
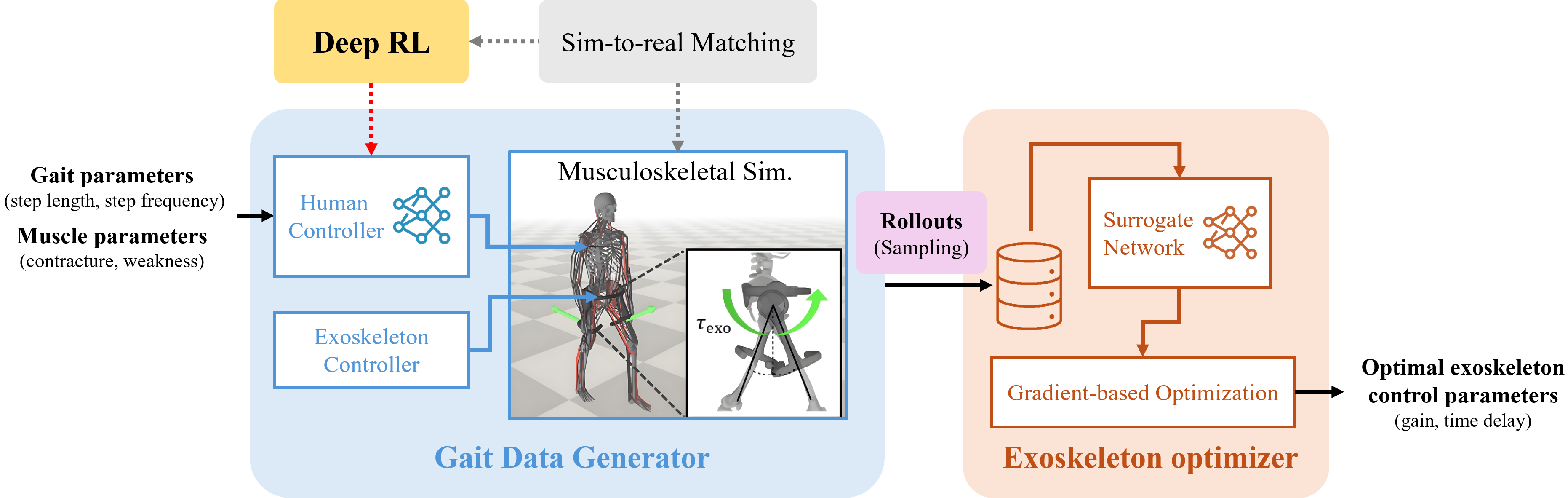
Exo-plore is a neuromechanical simulation framework developed to automate the process of identifying optimal control parameters for hip exoskeletons. The system utilizes a combined musculoskeletal model and control policies to predict human gait adaptation to assistive forces. Specifically, Exo-plore employs algorithms to iteratively refine exoskeleton parameters – including assistance timing, magnitude, and phasing – with the goal of maximizing the energetic efficiency of human walking as measured through simulation. This automated parameter discovery process aims to reduce the reliance on manual tuning and accelerate the development of effective and personalized exoskeleton control strategies.
Exo-plore utilizes simulation to forecast human responses to hip exoskeleton assistance by integrating musculoskeletal modeling with control policies. This approach involves constructing a biomechanical model of the human lower body, parameterized with subject-specific data, and coupling it with various control algorithms representing potential exoskeleton assistance strategies. The simulation environment then predicts changes in gait patterns – including joint angles, ground reaction forces, and muscle activations – as the exoskeleton’s parameters are varied. By repeatedly simulating and analyzing these adaptations, Exo-plore can identify control policies that maximize gait efficiency and minimize metabolic cost, effectively predicting how a human subject would adapt to the assistance provided by the exoskeleton.
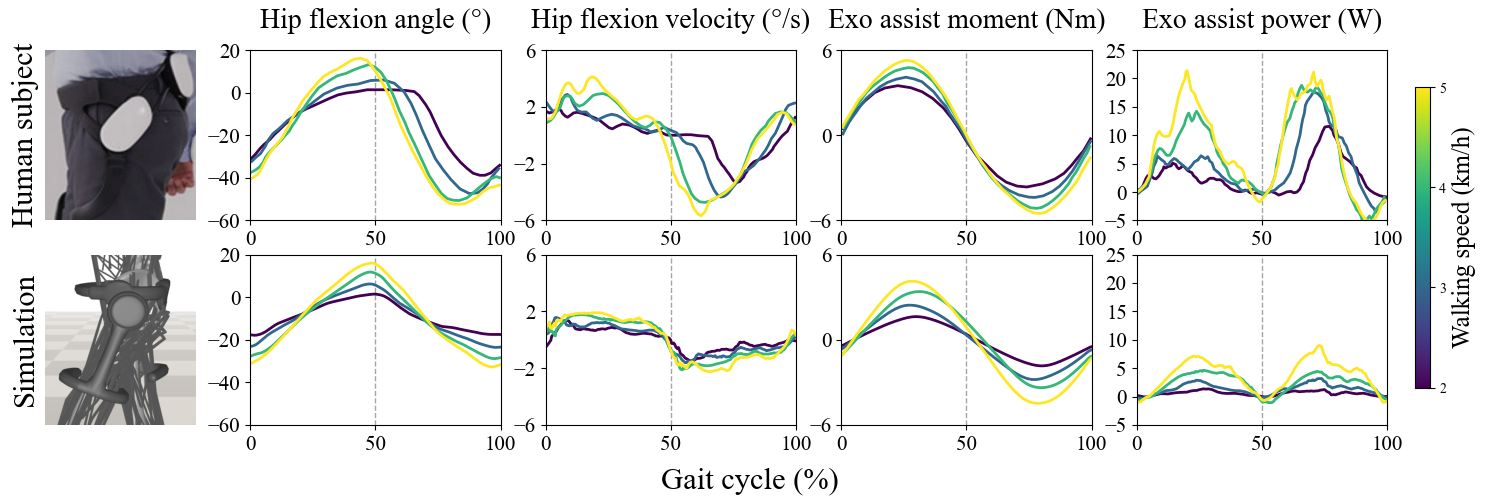
Exo-plore generates realistic gait data by utilizing a detailed musculoskeletal model informed by human biomechanical principles. This model incorporates parameters representing muscle actuation, joint dynamics, and body segment properties, allowing for the simulation of human walking with a high degree of fidelity. The framework employs inverse kinematics and dynamics algorithms to compute joint angles, forces, and powers during gait, and validates these simulations against experimentally collected human gait data. This data-driven approach ensures that the generated gait patterns accurately reflect the complex biomechanics of human walking, including variations in speed, terrain, and individual anatomy.
![The cost-to-go landscape, initially derived from raw simulation data, was effectively approximated using surrogate networks trained with varying Gaussian process regularization [latex] \lambda_{gp} [/latex] (0.1 and 0.01), enabling optimization of exoskeleton control parameters κ and [latex] \Delta t [/latex] across different walking speeds.](https://arxiv.org/html/2601.22550v1/figures/benefit.png)
Trading Simulations for Reality: A Necessary Compromise
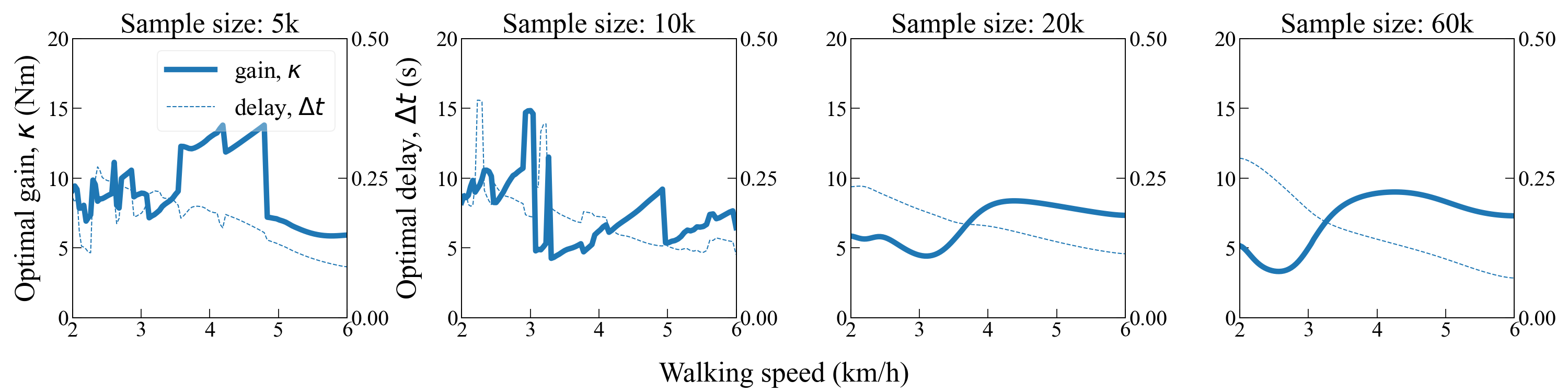
Exo-plore utilizes a neural network-based surrogate optimizer to address the computational demands of exploring high-dimensional control parameter spaces. This approach circumvents the need to directly evaluate performance for every parameter combination by constructing a predictive model trained on a limited set of simulation results. The neural network approximates the relationship between control parameters and resulting performance metrics, enabling the algorithm to efficiently identify promising parameter regions without exhaustive evaluation. This surrogate model acts as a computationally inexpensive proxy for the full simulation, significantly reducing the overall computational cost associated with optimization and parameter tuning.
The surrogate model utilized in Exo-plore functions by establishing a predictive relationship between control parameter inputs and simulation performance outputs, requiring only a subset of the total possible parameter space to be evaluated through actual simulations. This approach drastically reduces computational cost; instead of exhaustively testing all parameter combinations, the neural network learns from a limited initial dataset and then predicts performance for untested parameters. The accuracy of these predictions allows the optimization process to focus on promising areas of the parameter space, minimizing the need for expensive and time-consuming full simulations and accelerating the overall optimization workflow.
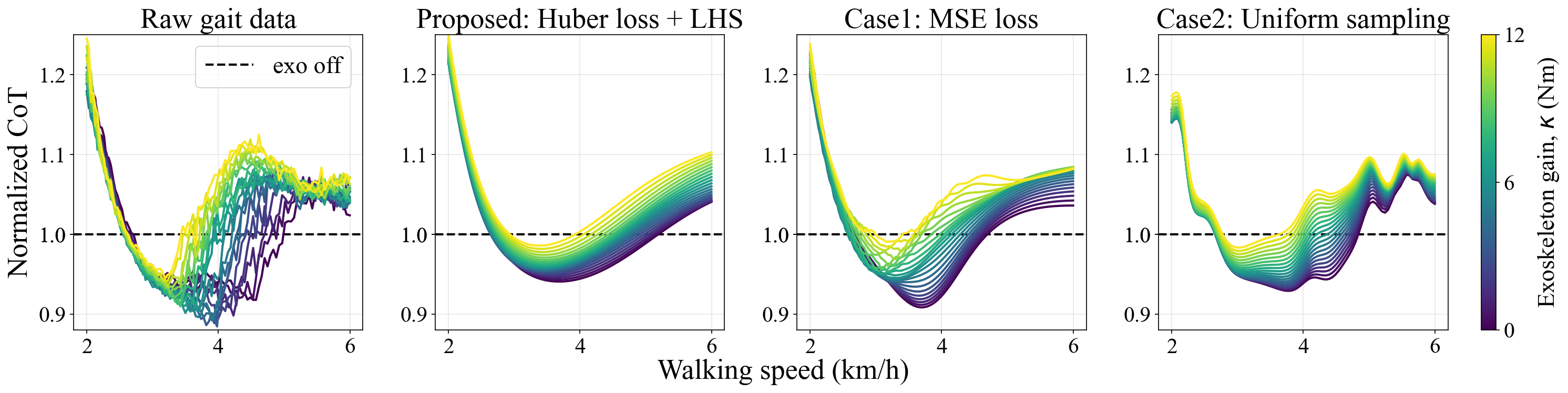
To establish a diverse initial dataset for the surrogate model, Latin Hypercube Sampling (LHS) is implemented. LHS ensures a more uniform coverage of the parameter space compared to purely random sampling, by dividing each input parameter into non-overlapping intervals and sampling one value from each. This method improves the efficiency of the subsequent optimization process. Simultaneously, the Huber Loss function is utilized during training to promote stable and robust learning. The Huber Loss combines the benefits of Mean Squared Error (MSE) and Mean Absolute Error (MAE); it is less sensitive to outliers than MSE, preventing a few aberrant simulations from disproportionately influencing the surrogate model, while still providing a smooth gradient for efficient optimization near the optimal parameter values.
Alternative surrogate modeling techniques, specifically Gaussian Process (GP) regression, were evaluated but determined unsuitable for the demands of this optimization process. While GPs offer probabilistic predictions, their computational cost scales cubically with the number of training samples – [latex]O(n^3)[/latex] – making them prohibitive for high-dimensional parameter spaces and the large number of simulations required by our model. This scaling behavior resulted in unacceptable training and prediction times, even with dimensionality reduction techniques, necessitating the adoption of a neural network-based surrogate model with a more favorable computational profile.
Mimicking Motion: The Devil is in the Biomechanical Details
The gait data generator employs a Hill-type muscle model, a mathematical representation of muscle mechanics consisting of a contractile element, a series elastic element, and a parallel elastic element. This model accurately simulates key muscle characteristics including active contraction, passive elasticity, and force-length and force-velocity relationships. The contractile element generates force based on neural activation signals, while the series and parallel elastic elements contribute to muscle compliance and prevent excessive stretch. By incorporating these features, the Hill-type model effectively captures the non-linear dynamics of human muscles during locomotion, resulting in realistic gait patterns and enabling accurate simulation of muscle forces and joint torques throughout the gait cycle.
Phase-based mirroring within the gait data generator enforces symmetry between the left and right sides of the walking cycle. This is achieved by reflecting kinematic and kinetic data from one limb to the other, offset by a phase shift representing the timing difference between corresponding events in each stride. Specifically, the system identifies key phases – such as heel strike, mid-stance, and toe-off – and mirrors the data associated with these phases across limbs, effectively creating a coordinated and natural walking pattern. The phase offset is dynamically adjusted to accommodate variations in walking speed and individual gait characteristics, ensuring realistic asymmetrical movements are still possible while maintaining overall symmetry.
Torque-based actuation within the gait simulation directly models the rotational forces muscles exert on skeletal joints, rather than relying on positional or velocity controls. This approach calculates and applies torques at each joint based on simulated muscle activation levels, accurately replicating the biomechanical process of human locomotion. By directly controlling the rotational force, the system avoids the inaccuracies inherent in attempting to indirectly achieve desired movements, resulting in a more physically plausible and realistic gait. The implemented torque control allows for precise simulation of muscle contributions to joint movements, including co-contraction and dynamic stability during walking.
Beyond the Average: Adapting to Real-World Impairments
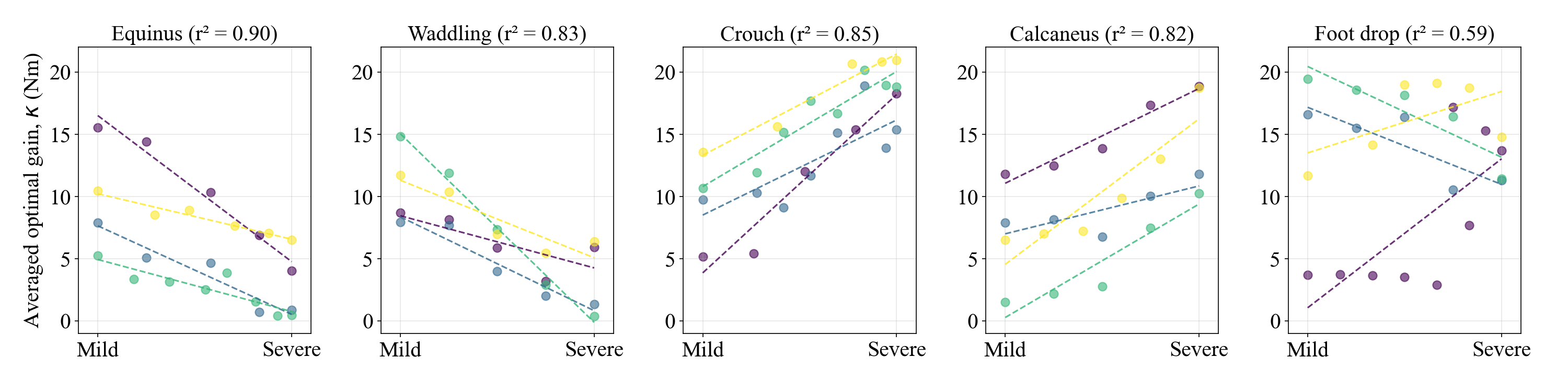
Exo-plore demonstrates a significant advancement in exoskeleton control by extending its adaptive assistance capabilities beyond typical, healthy walking patterns. The system successfully adjusts its support parameters to accommodate a range of pathological gaits, effectively responding to the unique challenges presented by conditions that alter natural movement. Notably, strong linear relationships were observed between the severity of the pathology and the optimal level of assistance required, holding true in four out of five tested conditions. This suggests a predictable and quantifiable connection between impairment and necessary support, paving the way for personalized exoskeleton designs that dynamically respond to an individual’s specific needs and the progression of their condition. The framework’s ability to generalize beyond healthy gait represents a crucial step towards creating assistive devices that truly enhance mobility for a diverse range of users.
The Exo-plore framework demonstrates a significant potential to revolutionize rehabilitation by moving beyond one-size-fits-all exoskeleton designs. Its ability to dynamically adjust assistance parameters in response to varied pathological gaits suggests a path toward truly personalized assistive devices. This adaptability isn’t merely about accommodating different conditions; it’s about optimizing support based on the specific presentation of impairment in each individual. By tailoring assistance, the framework aims to minimize unnecessary effort and promote more natural movement patterns, potentially leading to improved mobility, reduced energy expenditure, and enhanced quality of life for individuals facing a wide spectrum of impairments – from foot drop to more complex neurological conditions.
The development of an effective exoskeleton assistance strategy hinges on understanding how humans naturally optimize movement. This study leverages the Resistance Minimization Hypothesis, which posits that individuals subconsciously strive to reduce the energetic cost and biomechanical impedance encountered during locomotion. Consequently, the reward function employed within the Exo-plore framework is specifically designed to incentivize movement patterns that align with this principle – encouraging fluid, natural motion while actively minimizing extraneous effort. By rewarding actions that reduce resistance, the exoskeleton effectively learns to assist in a way that complements the user’s inherent biomechanics, rather than imposing artificial or counterproductive forces. This approach not only enhances the efficiency of assistance but also promotes a more intuitive and comfortable user experience, ultimately leading to improved gait adaptation and rehabilitation potential.
Analysis revealed a substantial increase in metabolic expenditure for individuals exhibiting high gait variability, particularly those with foot drop; the Coefficient of Variation of Cost of Transport was found to be four times greater compared to other pathological gaits studied. This indicates a significantly reduced efficiency of movement in these cases, demanding considerably more energy to achieve the same locomotor distance. The elevated variability suggests a less predictable and more erratic movement pattern, forcing the body to constantly adjust and expend energy to maintain balance and forward progression – a stark contrast to the relatively consistent and streamlined movements observed in less variable conditions. This finding underscores the importance of targeted assistance strategies that specifically address and mitigate this increased metabolic cost for individuals with conditions like foot drop.
Statistical analysis reveals a strong and reliable connection between the severity of pathological gait and the optimal level of assistance provided by the Exo-plore exoskeleton system. Pearson’s R² values, ranging from 0.73 to 0.91 across multiple gait impairments, indicate that approximately 73% to 91% of the variance in ideal assistance can be explained by the degree of the pathology itself. This high degree of correlation suggests the framework can accurately predict the necessary assistance level based solely on the characteristics of an individual’s impaired walking pattern, paving the way for personalized exoskeleton control strategies and reduced reliance on manual calibration or complex biomechanical modeling. The consistency of these values reinforces the robustness of the approach and its potential for broader application across diverse patient populations.
A comprehensive evaluation of Exo-plore’s performance, detailed in Appendix S, extends beyond the reported linear relationships between pathology severity and optimal assistance. This supplementary material presents quantitative metrics – including Normalized Dynamic Time Warping (NDTW) distance, Normalized Root Mean Squared Error (NRMSE), and Pearson correlation coefficient (R) – which provide a granular assessment of the system’s adaptability across varied pathological gaits. These metrics rigorously quantify the alignment between the exoskeleton’s assistance and the individual’s impaired movement patterns, confirming the robustness of the established correlations and demonstrating the framework’s capacity to generate precise, personalized assistance strategies for a diverse range of locomotor impairments. The detailed results within Appendix S serve as a foundational resource for researchers seeking to implement and refine similar assistive technologies.
The pursuit of elegant control frameworks, as demonstrated by Exo-plore, inevitably courts future complications. This framework, utilizing deep reinforcement learning to optimize exoskeleton control, feels less like a solution and more like a deferral of complexity. It’s a valiant attempt to sidestep exhaustive human-in-the-loop testing, but one suspects the simulated ‘normal’ gait will quickly fray at the edges when confronted with the beautiful messiness of real-world application. As Tim Berners-Lee observed, “The Web is more a social creation than a technical one.” This holds true for robotics; no amount of simulation can fully account for the unpredictable variables introduced by the human element, or the inevitable edge cases production will unearth. It’s an expensive way to complicate everything, really – trading one set of unknowns for another.
The Road Ahead (and It’s Paved with Alerts)
This framework, Exo-plore, dutifully joins the ranks of simulations promising to tame the chaos of embodied intelligence. It’s a neat trick, trading human trial-and-error for computational expense. Of course, the moment this ventures beyond carefully constructed virtual environments, production will inevitably reveal the edges of the model. Metabolic cost functions and pathological gait adaptations are, after all, infinitely more inventive in reality than any algorithm anticipates. One suspects the primary output won’t be optimized control parameters, but rather a prioritized list of edge cases previously unconsidered.
The pursuit of ‘human-aligned’ control is a particular irony. Humans are remarkably bad at consistently reproducing optimal movements, and even worse at articulating why they deviate. Expect a constant recalibration loop, chasing a moving target of imperfect biological control. The real challenge isn’t achieving optimality, but robustness – designing a system that gracefully degrades when faced with the sheer variety of human messiness.
Ultimately, this is simply a new coat of paint on an old problem. For every elegant theory of gait adaptation, there’s a user who will find a way to break it. It’s a comforting truth, really. Everything new is old again, just renamed and still broken. The simulation is a good start, a useful tool – until it isn’t. Then it’s just another debugging session.
Original article: https://arxiv.org/pdf/2601.22550.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- ‘Project Hail Mary’s Unexpected Post-Credits Scene Is Worth Sticking Around
- Total Football free codes and how to redeem them (March 2026)
- Limbus Company 2026 Roadmap Revealed
- The Division Resurgence Specializations Guide: Best Specialization for Beginners
- After THAT A Woman of Substance cliffhanger, here’s what will happen in a second season
- Brawl Stars Sands of Time Brawl Pass brings Sandstalker Lily and Sultan Cordelius sets, along with chromas and more
- Brawl Stars Brawl Cup Pro Pass arrives with the Dragon Crow skin and Chroma, unique cosmetics, and more rewards
- Clash of Clans April 2026 Gold Pass Season introduces a Archer Queen skin
- XO, Kitty season 3 soundtrack: The songs you may recognise from the Netflix show
- Gold Rate Forecast
2026-02-03 07:48