Author: Denis Avetisyan
This in-depth review explores the cutting-edge techniques and tools enabling deterministic performance in the increasingly popular Robot Operating System 2.
A comprehensive survey of real-time support, analysis methods, and advancements in ROS 2 for robotics and autonomous systems.
Achieving predictable and timely performance remains a significant challenge in complex robotic systems despite advances in middleware frameworks. This survey, ‘A Survey of Real-Time Support, Analysis, and Advancements in ROS 2’, comprehensively analyzes the evolving landscape of real-time capabilities within the Robot Operating System 2 (ROS~2) ecosystem. It reveals a growing body of work focused on scheduling analysis, communication optimization-including techniques for bounding delays in Data Distribution Service (DDS)-and runtime enhancements like novel executor designs and microcontroller support. As ROS~2 adoption expands across increasingly safety-critical applications, how can researchers and practitioners best leverage these advancements to guarantee deterministic and reliable robotic behavior?
The Inevitable Limits of Conventional Robotics
Conventional robotics middleware, designed for earlier generations of robots and tasks, increasingly faces limitations when accommodating the demands of contemporary applications. These systems often rely on general-purpose operating systems and communication protocols not optimized for the precise timing crucial in areas like high-speed manipulation, collaborative robotics, and real-time control loops. The inherent overhead of these architectures – including context switching, interrupt handling, and non-deterministic communication – introduces unpredictable delays, making it difficult to guarantee the responsiveness and reliability needed for complex behaviors. Consequently, developers find themselves battling latency and jitter, hindering the creation of truly agile and dependable robotic systems and necessitating complex workarounds to achieve acceptable performance.
For safety-critical systems – encompassing applications like autonomous vehicles and advanced industrial automation – predictable and deterministic behavior isn’t merely desirable, it’s foundational. These systems operate within real-world environments demanding unwavering reliability; a momentary lapse in predictable response can have severe consequences. Unlike applications where occasional errors are tolerable, robotic systems controlling physical processes require guaranteed execution times and consistent outputs for every input. This necessitates a departure from traditional software architectures that prioritize average performance over worst-case execution time, as even brief, unpredictable delays can compromise safety and operational integrity. Consequently, rigorous validation and verification procedures, alongside specialized software and hardware designs, are paramount to ensure these systems consistently behave as intended, minimizing risk and maximizing dependability.
Current robotics systems often rely on software architectures that introduce unpredictable delays – known as latency – in processing sensor data and executing commands. This latency stems from the inherent complexities of managing multiple processes and communicating between diverse hardware components. Furthermore, achieving reliable performance frequently demands extensive and painstaking tuning of numerous software parameters, a process that is both time-consuming and requires specialized expertise. Consequently, developers face significant hurdles in rapidly prototyping, iterating, and deploying new robotic applications, slowing the pace of innovation and increasing the cost of bringing advanced robotics solutions to market. The need for a more streamlined and predictably performant framework is therefore critical to unlock the full potential of modern robotics.
The progression of robotics hinges on the development of frameworks capable of balancing adaptability with consistent, predictable performance. Current systems often force a trade-off: either rigid structures guaranteeing timing constraints but lacking the flexibility to integrate new algorithms or sensors, or highly adaptable systems prone to unpredictable delays that jeopardize real-time control. This limitation significantly impedes innovation, particularly in areas demanding stringent reliability, such as surgical robotics and autonomous navigation. A truly advanced robotics framework must therefore prioritize both characteristics, enabling rapid prototyping and deployment of complex behaviors while simultaneously assuring deterministic execution – a challenge that, if overcome, promises to unlock a new era of intelligent, responsive, and safe robotic systems.
ROS2: A Step Towards Predictability, But Not a Salvation
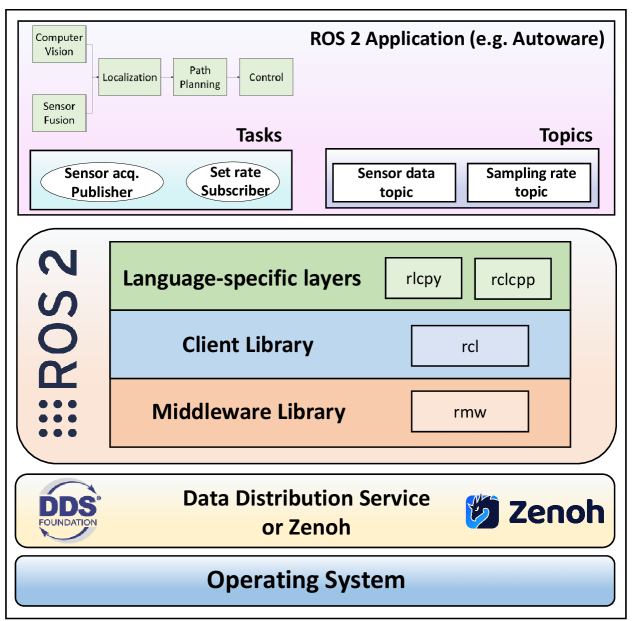
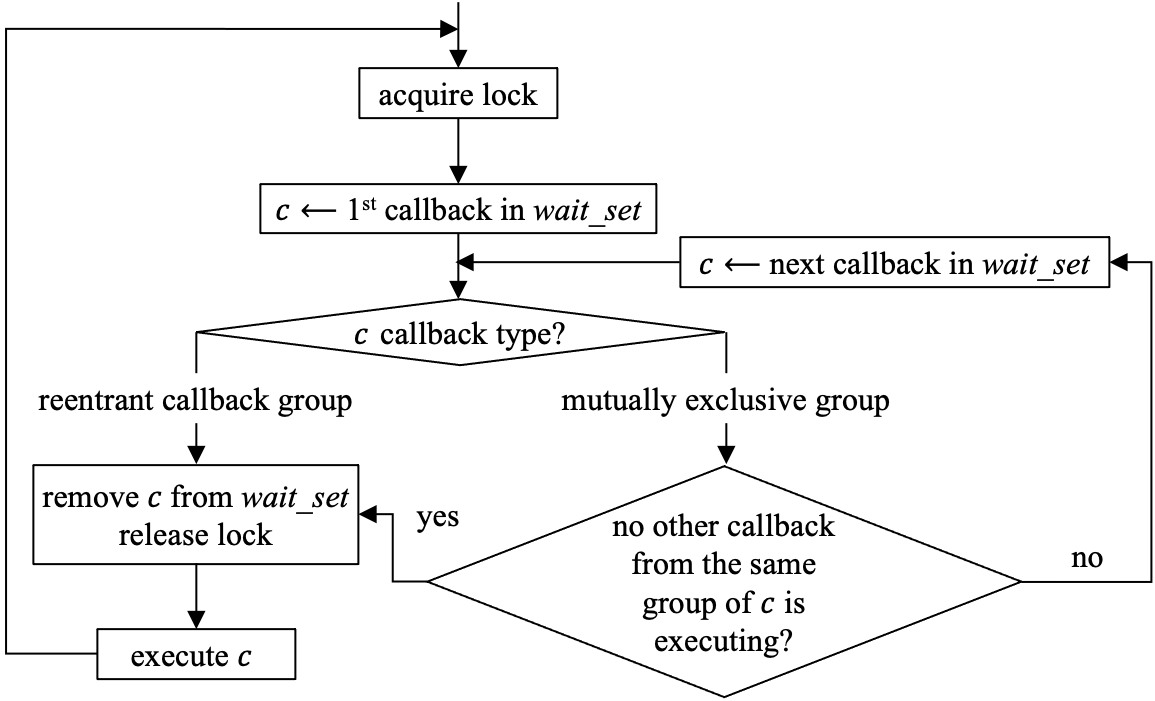
ROS 2 provides two primary executor options impacting real-time system performance: the SingleThreadedExecutor and the MultiThreadedExecutor. The SingleThreadedExecutor processes callbacks sequentially within a single thread, simplifying determinism and avoiding concurrency-related issues but limiting the utilization of multi-core processors. Conversely, the MultiThreadedExecutor leverages multiple threads to execute callbacks concurrently, potentially improving throughput and responsiveness on multi-core hardware. However, this concurrency introduces complexities such as thread synchronization and potential priority inversion, demanding careful consideration of scheduling policies to maintain predictable, real-time behavior. The choice between these executors depends on the specific application requirements, balancing the need for determinism against the desire for maximized performance.
The MultiThreadedExecutor in ROS2 achieves concurrency by distributing tasks across multiple threads, improving throughput for computationally intensive workloads. However, this concurrency introduces the potential for priority inversion, a condition where a higher-priority thread is blocked by a lower-priority thread holding a required resource. This occurs when the lower-priority thread is preempted by a medium-priority thread, causing a deadlock situation. Priority inversion directly undermines determinism, as task execution times become unpredictable and dependent on the scheduling of other threads, potentially violating real-time constraints. Mitigating priority inversion requires careful system design and the implementation of priority inheritance or priority ceiling protocols.
Effective management of concurrent tasks within ROS2 relies on the implementation of appropriate scheduling strategies. FixedPriorityScheduling assigns static priorities to tasks, ensuring higher-priority tasks preempt lower-priority ones, simplifying analysis but potentially leading to priority inversion. Conversely, Earliest Deadline First Scheduling (EDFScheduling) dynamically prioritizes tasks based on their deadlines, maximizing the likelihood of meeting critical deadlines but requiring precise deadline specification and potentially increasing computational overhead. The selection of a scheduling strategy is dependent on the specific application requirements, balancing determinism, real-time performance, and computational cost. Both strategies require careful configuration and analysis to avoid common pitfalls and ensure predictable system behavior when utilizing the MultiThreadedExecutor.
ZeroCopyCommunication in ROS2 minimizes data copying between processes by utilizing shared memory and direct memory access, reducing latency and CPU overhead. This is achieved through mechanisms like Shared Memory Intra-Process Communication (SMIPC) and Data Transfer Objects (DTOs) that allow nodes to access data directly without serialization/deserialization cycles. Complementing this, MessageFiltering selectively processes incoming messages based on criteria defined by the subscriber, preventing unnecessary data processing and further reducing latency and bandwidth usage. These techniques are particularly crucial for high-throughput applications and real-time systems where minimizing communication overhead is paramount to achieving deterministic behavior.
Formalization: A Fragile Shield Against Entropy
RealTimeAnalysis in ROS2 employs formal methods to verify and predict the timing behavior of robotic systems. These techniques utilize mathematical modeling and analysis to determine if a ROS2 application will meet specified timing constraints, such as deadlines for message delivery or task completion. The process involves constructing a model of the system’s timing characteristics, including task execution times, communication delays, and resource contention. This model is then subjected to analysis – typically using static analysis or model checking – to prove or disprove the satisfaction of timing properties. Successful verification provides strong guarantees about the system’s predictable performance, while prediction allows developers to estimate worst-case execution times and identify potential timing violations before deployment.
FormalVerification in the context of ROS2 systems employs rigorous mathematical proofs to establish the correctness of system behavior concerning timing constraints and resource utilization. This process involves constructing a formal model of the system – representing components, their interactions, and associated timing properties – and then using theorem proving or model checking techniques to verify that the model satisfies specified requirements. Specifically, it can demonstrate that tasks meet deadlines, resource access is properly synchronized, and system-wide invariants hold. The output of FormalVerification is a high degree of confidence – backed by mathematical certainty – that the system will operate as intended with respect to its timing and resource limitations, unlike empirical testing which can only demonstrate behavior for a limited set of scenarios.
The PREEMPTRT patch is a kernel modification designed to enhance determinism in ROS2 systems by optimizing task scheduling. This patch reduces preemption latency and improves the predictability of task execution times, which is crucial for formal verification and real-time analysis. Benchmarking indicates that implementing PREEMPTRT can yield up to a 50% reduction in worst-case execution time (WCET) for ROS2 applications, enabling more accurate timing constraint validation and improved system reliability. The patch achieves this performance gain through refined scheduling algorithms and reduced context switching overhead, contributing to a more predictable and verifiable system behavior.
Tracing tools are critical components in the development and maintenance of robust ROS2 applications. These tools facilitate the monitoring and profiling of system behavior, enabling the identification of performance bottlenecks that may compromise real-time constraints. Data collected through tracing is also essential for validating the results of formal verification and real-time analysis techniques, ensuring the accuracy of predicted timing behavior. Importantly, current implementations of these tracing tools introduce a latency overhead of less than 15%, minimizing the impact on the performance of the monitored ROS2 system.
Beyond the Horizon: Ecosystems, Not Just Frameworks
The convergence of ROS2 and AUTOSAR signifies a pivotal advancement in automotive robotics. AUTOSAR, already a cornerstone for software architectures in numerous production vehicles, provides a standardized and safety-certified foundation. Integrating ROS2’s flexible framework onto this platform allows developers to leverage the strengths of both systems – the robustness and reliability of AUTOSAR with the agility and extensive algorithm library of ROS2. This synergy isn’t merely theoretical; it facilitates the deployment of sophisticated robotic functionalities-such as advanced driver-assistance systems, automated parking, and even fully autonomous driving features-directly into the automotive ecosystem. Consequently, manufacturers can accelerate innovation and reduce development costs by building upon a pre-existing, well-established automotive software infrastructure, ultimately paving the way for more intelligent and capable vehicles.
Modern robotics applications, particularly those within automotive systems, frequently demand substantial computational resources. To address this, research increasingly focuses on leveraging HardwareAcceleration in conjunction with sophisticated ResourceManagement techniques. By offloading computationally intensive tasks – such as sensor data processing, path planning, and object recognition – to specialized hardware like GPUs or FPGAs, systems can achieve significant performance gains. However, simply adding hardware isn’t enough; effective resource management is crucial. This involves dynamically allocating and prioritizing processing power, memory, and communication bandwidth to ensure critical tasks receive the necessary resources while minimizing latency and energy consumption. These combined strategies not only boost processing speed but also enable the deployment of more complex algorithms and functionalities within resource-constrained environments, paving the way for more intelligent and responsive robotic systems.
MicroROS significantly broadens the scope of robotic applications by bringing the functionality of ROS2 to microcontrollers – small, low-power computing devices. This extension allows for the creation of highly distributed robotic systems where processing isn’t centralized, but rather spread across numerous embedded devices. By operating effectively within the limitations of these resource-constrained environments, MicroROS facilitates the development of smaller, more energy-efficient robots and robotic components. This distributed architecture is particularly advantageous in applications requiring localized processing, reduced communication bandwidth, and enhanced resilience, as failure of a single node doesn’t necessarily compromise the entire system. Consequently, MicroROS is enabling innovation in areas like swarm robotics, modular robots, and advanced sensor networks, paving the way for increasingly sophisticated and adaptable robotic solutions.
LinguaFranca represents a significant advancement in robotic coordination, offering a deterministic language designed to guarantee predictable event processing – a critical requirement for safety-sensitive applications. This approach demonstrably enhances the reliability of complex robotic interactions, particularly when handling substantial data streams; testing reveals a remarkable capacity to reduce latency for large message payloads by up to 173x. Implementation within High-Performance Robotic Middleware (HPRM) during autonomous racing simulations further substantiates these gains, yielding an overall 91.1% improvement in end-to-end latency and enabling more responsive and dependable robotic behaviors in dynamic environments. The predictable timing afforded by LinguaFranca isn’t merely about speed, but about ensuring consistent, reliable performance even under heavy computational load.
The pursuit of real-time capabilities within ROS 2, as detailed in this survey, echoes a fundamental truth about complex systems. One strives not for perfect control, but for graceful degradation. As John von Neumann observed, “With four parameters I can fit an elephant, and with five I can make him dance.” The intricacies of scheduling analysis and latency optimization aren’t about eliminating unpredictability-an impossible task-but about understanding and accommodating it. ROS 2’s architecture, with its reliance on DDS and focus on modularity, implicitly acknowledges this. It’s a system designed to absorb shocks, to forgive component failures, and to continue functioning, even if not flawlessly. The goal isn’t a rigid machine, but a resilient garden.
What Lies Ahead?
The surveyed work demonstrates a persistent effort to impose predictability onto a fundamentally unpredictable system. Each scheduling analysis, each latency optimization, is a carefully constructed map of potential failures – a prophecy of the inevitable moment when real-world complexity overwhelms the modeled ideal. The advances are real, certainly, but they resemble elaborate dams built against a rising tide. One suspects the true challenge isn’t minimizing latency, but accepting it as a fundamental characteristic of distributed robotic systems.
Formal verification offers a temporary illusion of control, a static snapshot of correctness. Yet, a deployed system is not a theorem; it is a living, adapting organism exposed to unforeseen inputs and emergent behaviors. The field will likely shift from seeking absolute guarantees to developing robust methods for detecting and mitigating failures in real-time – graceful degradation, rather than brittle perfection.
The current emphasis on low-level optimization feels increasingly like rearranging deck chairs. Future work must confront the systemic issues: the inherent brittleness of complex software dependencies, the difficulty of maintaining documentation for rapidly evolving codebases (as if anyone ever writes prophecies after they come true), and the uncomfortable truth that scalability often comes at the expense of predictability. The ecosystem will grow, regardless. The question isn’t whether it will succeed, but what form its inevitable failures will take.
Original article: https://arxiv.org/pdf/2601.10722.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Clash Royale Best Boss Bandit Champion decks
- Vampire’s Fall 2 redeem codes and how to use them (June 2025)
- World Eternal Online promo codes and how to use them (September 2025)
- Best Arena 9 Decks in Clast Royale
- Country star who vanished from the spotlight 25 years ago resurfaces with viral Jessie James Decker duet
- ‘SNL’ host Finn Wolfhard has a ‘Stranger Things’ reunion and spoofs ‘Heated Rivalry’
- JJK’s Worst Character Already Created 2026’s Most Viral Anime Moment, & McDonald’s Is Cashing In
- Solo Leveling Season 3 release date and details: “It may continue or it may not. Personally, I really hope that it does.”
- M7 Pass Event Guide: All you need to know
- Kingdoms of Desire turns the Three Kingdoms era into an idle RPG power fantasy, now globally available
2026-01-20 13:13