Author: Denis Avetisyan
New research demonstrates how coordinating movement with radio signal strength allows teams of robots to map complex environments more efficiently.
Adaptive communication-aware motion planning improves multi-agent robotic exploration in connectivity-constrained environments.
Effective coordination in multi-agent robotic systems is often hampered by the limitations of unreliable communication, particularly in complex environments. This challenge is addressed in ‘RF-Modulated Adaptive Communication Improves Multi-Agent Robotic Exploration’, which introduces a novel communication-aware planning algorithm that dynamically optimizes transmission based on signal strength and data payload. Through extensive simulations, this work demonstrates that adaptive, payload-aware communication can reduce travel distance by up to 58% and accelerate exploration times by up to 52% compared to existing strategies. Could this approach unlock more efficient and robust robotic exploration for challenging applications like planetary science and search-and-rescue operations?
The Inevitable Limits of Wireless: A Subterranean Reality Check
The investigation of subterranean environments, such as caves and tunnels, introduces substantial difficulties for collaborative robotic systems. These spaces are inherently characterized by limited or nonexistent signal propagation, disrupting conventional communication protocols and hindering coordinated action. Unlike open-world scenarios, multi-robot teams operating underground face the compounded problem of navigating intricate, three-dimensional layouts while simultaneously attempting to share crucial data – mapping information, localization estimates, and task assignments – without reliable wireless connectivity. This necessitates a shift toward more robust and adaptive strategies, where robots must prioritize information exchange based on relevance and urgency, and potentially rely on localized, short-range communication or even operate with a degree of autonomy during periods of complete signal denial, demanding advanced algorithms for self-reliance and eventual team reintegration.
Conventional methods of subterranean robotic exploration often rely on a ‘return-to-base’ communication strategy, where robots periodically resurface to transmit collected data and receive new instructions. While seemingly straightforward, this approach introduces significant limitations to both efficiency and coverage. Each return trip consumes valuable time and energy, drastically reducing the area a team can survey within a given timeframe. Furthermore, the need for frequent resurfacing forces robots to retrace their steps, potentially overlooking crucial areas or becoming trapped by unforeseen obstacles. This cyclical behavior sharply contrasts with the ideal of continuous, independent exploration, hindering the potential for rapid mapping and comprehensive data collection in complex, signal-denied environments. Consequently, alternative communication paradigms are essential to overcome these constraints and unlock the full potential of multi-robot teams in subterranean settings.
Sustained robotic exploration of subterranean environments hinges on overcoming substantial communication hurdles. Unlike open-air operations, caves and tunnels severely attenuate or block radio signals, rendering conventional ‘return-to-base’ communication strategies impractical and limiting the scope of discovery. Consequently, researchers are actively developing novel communication paradigms that prioritize efficient data relay amongst robots within the team, rather than constant contact with a distant base station. These approaches involve strategies like opportunistic communication – where robots share data when in range – and data compression techniques to minimize transmission overhead. The goal isn’t simply to send all information, but to intelligently transmit the most critical data – such as maps, points of interest, and hazard warnings – allowing the team to collaboratively build a comprehensive understanding of the environment while maximizing forward progress and minimizing reliance on external connectivity.
Path Planning That Understands Reality: A Modest Improvement
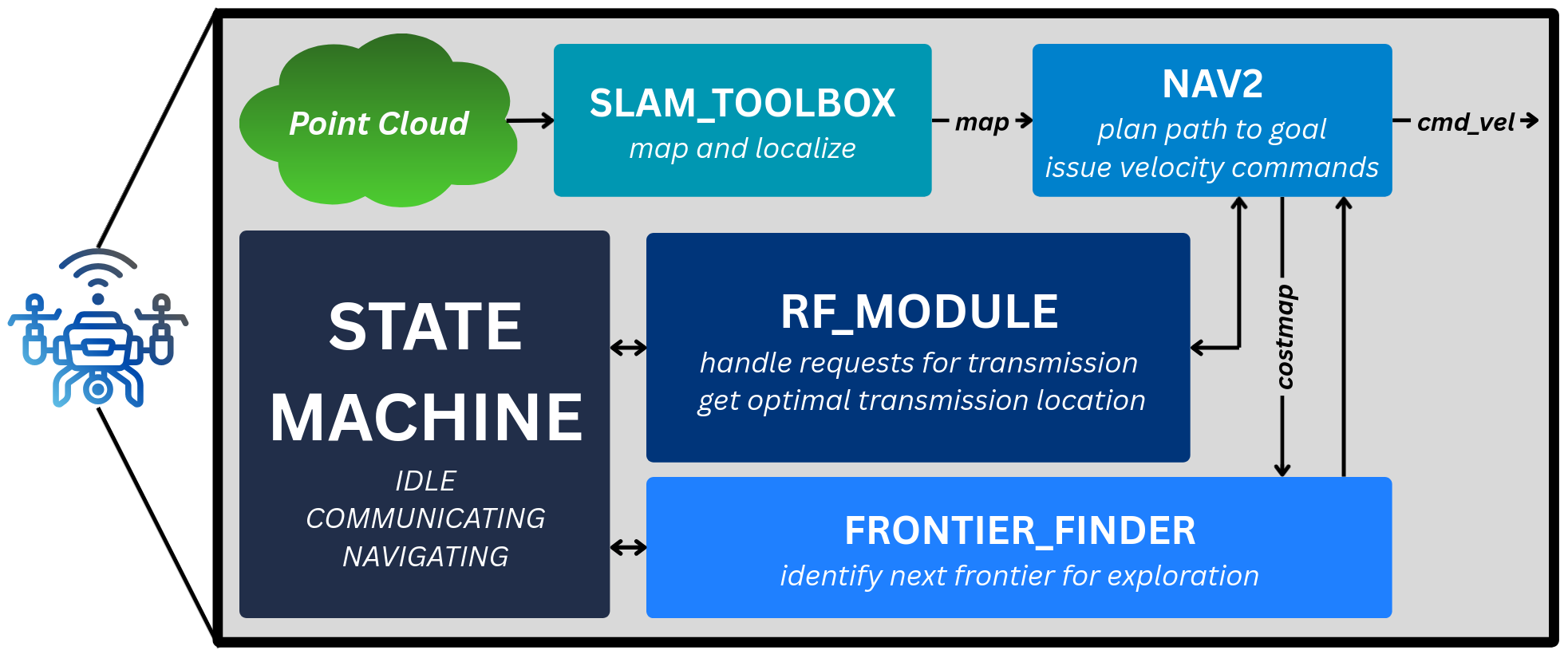
The communication-aware motion planning framework is designed to facilitate coordinated operation between Scout and Specialist robots in environments with unreliable or limited radio frequency (RF) communication. This framework moves beyond traditional path planning by explicitly incorporating communication quality as a key factor in route selection. The system enables robots to dynamically adjust their trajectories to maximize the probability of successful data transmission, reducing the need for frequent revisits to a base station for communication relay. By integrating communication considerations directly into the motion planning process, the framework improves the overall efficiency and robustness of the Scout-Specialist team’s operations in challenging signal conditions.
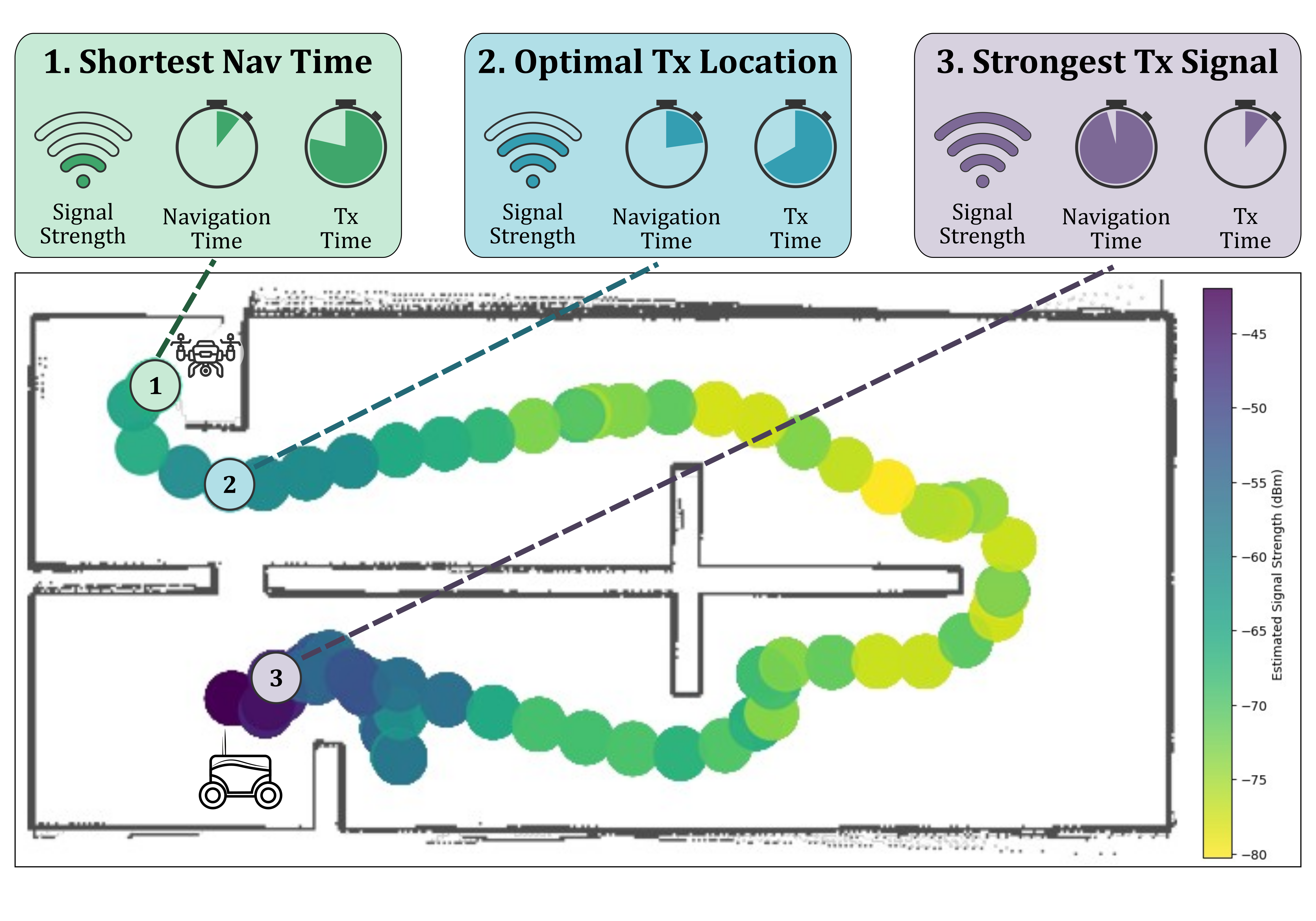
The Adaptive RF Transmission (ART) algorithm functions by dynamically weighting the cost of traversing a given path against predicted radio frequency (RF) communication quality along that same path. This allows the system to prioritize routes that facilitate reliable data transmission to a base station, even if those routes represent a slightly increased distance or computational cost for the mobile agent. The balancing is achieved through a cost function that incorporates both path length and a metric representing expected signal strength, effectively enabling intelligent path selection that optimizes the trade-off between exploration efficiency and data delivery performance. This dynamic adjustment is crucial for maintaining consistent communication in environments with fluctuating or limited RF coverage.
Adaptive RF Transmission (ART) utilizes predictive signal strength modeling to inform path planning decisions, optimizing data transmission from the Scout to the Specialist. This process involves forecasting signal attenuation based on environmental factors and robot location, then employing the A* search algorithm to identify routes that maximize predicted signal strength while minimizing path cost. By proactively assessing communication viability, ART enables the Scout to prioritize data delivery and avoid areas with poor connectivity, thereby reducing re-transmission rates and maintaining continuous operation without requiring frequent returns to the base station for data offloading.
The Scout-Specialist paradigm, where a mobile Scout robot explores an environment and relays data to a static Specialist robot, experiences improved operational efficiency through reduced base station revisits. Traditionally, frequent returns to a base station are necessary to offload collected data, limiting the Scout’s exploration range and increasing mission time. By leveraging communication-aware motion planning and algorithms like Adaptive RF Transmission (ART), the Scout can intelligently select paths that prioritize both exploration and reliable data transmission. This enables the Scout to relay larger volumes of data directly to the Specialist, minimizing the need for trips back to the base station for data offload and consequently extending the overall operational range and duration of the team.

Demonstrating Marginal Gains: Performance Validation
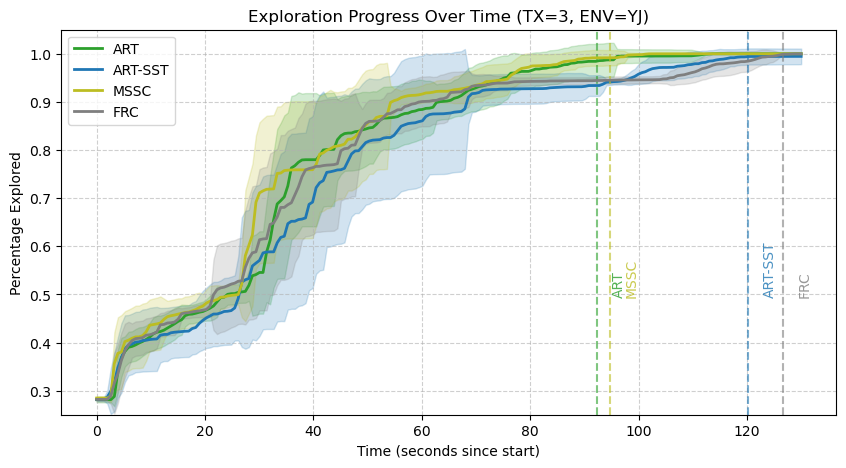
Performance evaluations of the Adaptive Re-localization Technique (ART) were conducted using two established baseline methods: the Minimum Signal Strength Condition (MSSC) and the Full Rehome Condition (FRC). MSSC operates by initiating re-localization when signal strength falls below a predefined threshold, while FRC mandates complete re-localization at fixed intervals. These methods served as comparative benchmarks to quantify ART’s improvements in exploration efficiency and coverage. Data collected during testing included metrics such as exploration time, total path distance, disruption score, and coverage area, allowing for a direct assessment of ART’s performance gains relative to both MSSC and FRC.
Comparative analysis indicates that the Adaptive Re-localization Technique (ART) demonstrably improves robotic exploration efficiency. Testing against the Minimum Signal Strength Condition (MSSC) and Full Rehome Condition (FRC) baselines, ART achieved up to a 51.7% reduction in total exploration time. This performance gain directly translates to increased coverage area during the same operational period. The reduction in exploration time was consistently observed across multiple trials, indicating a statistically significant improvement over the baseline methods. These results suggest ART facilitates faster data gathering and more comprehensive environmental mapping in constrained or dynamic environments.
The Disruption Score, utilized as a primary evaluation metric, quantifies the trade-off between an agent’s exploratory behavior and its ability to maintain communication with a base station. Lower scores indicate a superior balance; ART consistently minimizes this score compared to baseline methods like MSSC and FRC. This minimization is achieved through ART’s adaptive exploration strategy, which prioritizes areas with both high information gain and strong signal connectivity. A reduced Disruption Score demonstrates ART’s efficacy in sustaining reliable data transmission while maximizing the area explored, crucial for applications in bandwidth-constrained or intermittently connected environments.
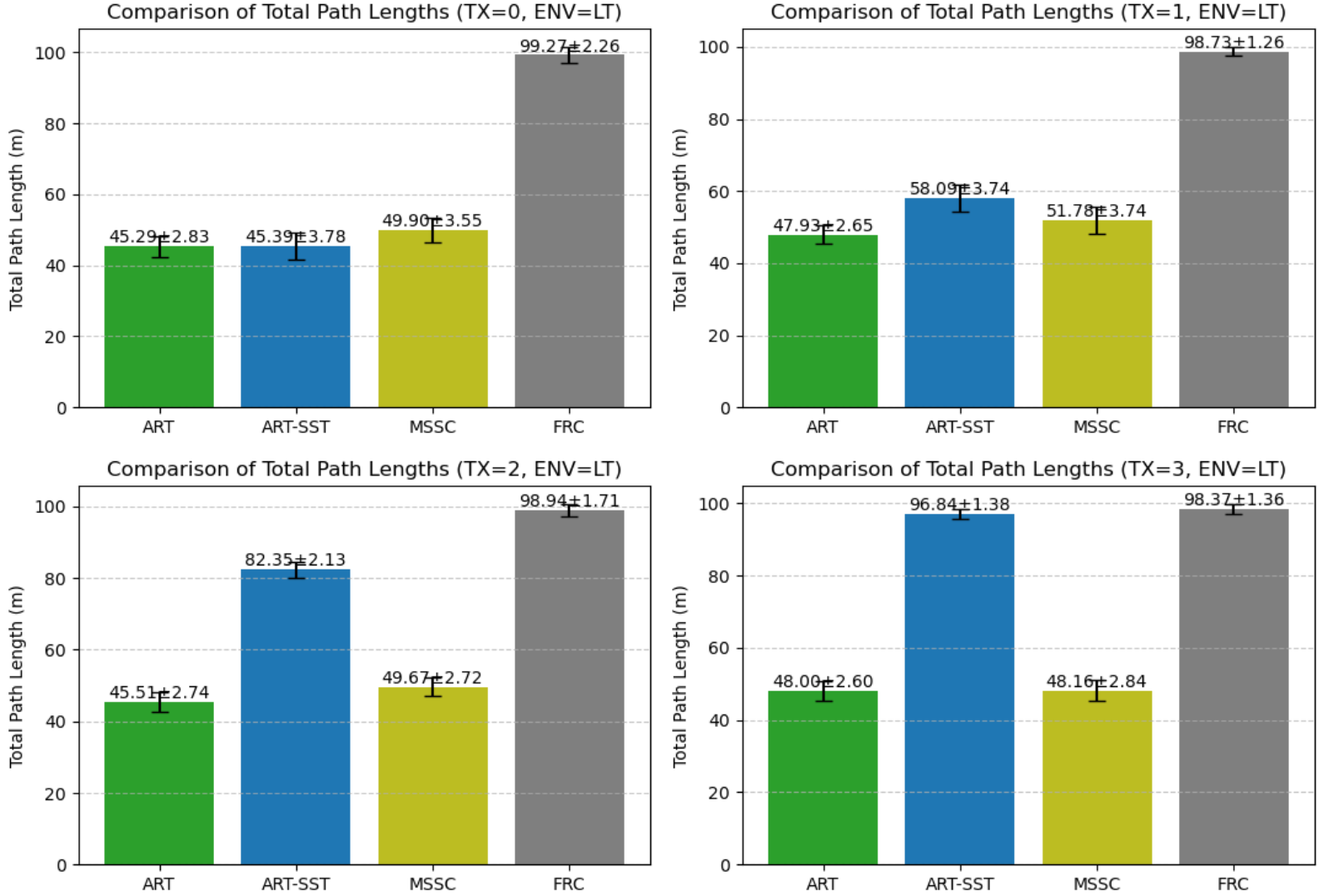
Analysis indicates that the performance of the Adaptive Re-localization Technique (ART) is directly affected by the size of the data payload being transmitted; larger payloads require more frequent and extensive exploration. This sensitivity underscores the critical need for data prioritization in bandwidth-constrained environments to optimize exploration efficiency. Comparative testing demonstrates that ART reduces total path distance traveled during data collection by up to 58.2% when compared to baseline methods like Minimum Signal Strength Condition (MSSC) and Full Rehome Condition (FRC), demonstrating substantial gains in operational efficiency through intelligent data handling.
Beyond the Competition: Long-Term Implications and Future Work
The developed system directly addresses the challenges presented by the DARPA Subterranean Challenge (SubT), a demanding competition focused on robotic exploration of complex, human-made underground environments. By providing robust and reliable signal strength-based localization, the research empowers robots to navigate and map these environments-such as caves, mines, and urban undergrounds-more effectively, even in the absence of GPS or other traditional positioning systems. This capability is crucial for autonomous operation, allowing robots to build detailed maps, locate specific targets, and ultimately perform critical tasks in environments where human access is dangerous or impossible, directly contributing to advancements in search and rescue, infrastructure inspection, and disaster response.
The developed system is designed for practical application, and its compatibility with the Robot Operating System 2 (ROS2) and the SLAM Toolbox significantly streamlines deployment on a variety of robotic platforms. This integration allows for rapid prototyping and testing on both unmanned aerial vehicles (UAVs), functioning as swift reconnaissance scouts, and unmanned ground vehicles (UGVs) specializing in detailed environmental assessment. By leveraging these established robotic frameworks, the technology transitions smoothly from simulated environments to real-world scenarios, promising enhanced autonomy and mapping capabilities for robots operating in complex and challenging conditions. This focus on interoperability ensures that advancements in algorithm performance translate directly into tangible improvements in robotic field operations.
Predictive accuracy of robotic navigation systems can be substantially improved through the incorporation of advanced signal strength modeling. Future investigations will concentrate on refining these models, with particular attention given to the [latex]Log-Distance Path-Loss Model[/latex]. This approach accounts for signal attenuation as a function of distance and obstacles, allowing robots to better estimate their location and map unexplored areas even with limited sensor data. By accurately predicting signal propagation characteristics, the system can differentiate between genuine environmental features and signal distortions, ultimately enabling more robust and efficient navigation in complex and unpredictable environments like subterranean tunnels or disaster zones. This detailed understanding of signal behavior promises to reduce reliance on computationally expensive mapping processes and enhance the overall autonomy of robotic explorers.
Advancements in robotic exploration are poised to benefit from the integration of wavefront-based frontier detection alongside Adaptive Resonance Theory (ART). This approach moves beyond simple boundary identification by simulating the propagation of a signal – a ‘wavefront’ – to evaluate the informational value of potential exploration targets. By analyzing how this wavefront diffuses and interacts with the environment, the system can prioritize areas that promise the greatest reduction in uncertainty, effectively mapping unknown spaces with increased efficiency. Crucially, the incorporation of ART allows the robot to learn and categorize environmental features on the fly, adapting its exploration strategy based on encountered patterns and reducing redundant data collection. This synergy between wavefront analysis and ART promises a significant leap towards fully autonomous exploration, enabling robots to intelligently select targets, optimize path planning, and ultimately achieve a more comprehensive understanding of complex, uncharted environments.
The pursuit of seamless multi-agent coordination, as detailed in this work, inevitably introduces compromise. It’s a dance between theoretical elegance and the brutal reality of signal attenuation and limited bandwidth. The study highlights improved exploration efficiency through adaptive communication-aware motion planning, but one suspects even this optimized system will, in time, require patching and adjustments as environments grow more complex. As Edsger W. Dijkstra observed, “It’s always time to optimize-prematurely is the root of all evil.” The core idea – enhancing exploration with better communication – isn’t novel; the adaptation to practical limitations is where the true, albeit temporary, victory lies. Everything optimized will one day be optimized back, and this research merely buys a little more time before the next round of necessary resuscitation.
What’s Next?
The demonstrated improvements in multi-agent exploration, while statistically significant, predictably highlight the next layers of complication. Optimizing for signal strength, as this work shows, merely trades one bottleneck for another. Production deployments will inevitably reveal scenarios where ‘sufficient’ connectivity is defined by the least capable robot, or when heterogeneous robot capabilities create unforeseen coordination failures. The elegant motion planning presented here will require constant recalibration against the reality of battery drain, sensor noise, and the simple fact that robots collide.
Future work will undoubtedly focus on increasingly sophisticated communication models – perhaps leveraging the very frequencies this paper manipulates to create localized interference for competitive advantage between agents. The field will chase ‘perfect’ information transfer, conveniently forgetting that perfect information is rarely cheap, and that the cost of maintaining a pristine communication network will likely exceed the gains from optimized exploration.
It’s worth remembering that every advance in autonomy is, at its core, an expensive way to complicate everything. This research is no exception. The true test will not be the performance in a simulated environment, but the inevitable patch notes detailing workarounds for edge cases no one anticipated. If the code looks perfect, no one has deployed it yet.
Original article: https://arxiv.org/pdf/2602.12074.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Invincible Season 4 Episode 4 Release Date, Time, Where to Watch
- Physics Proved by AI: A New Era for Automated Reasoning
- How Martin Clunes has been supported by TV power player wife Philippa Braithwaite and their anti-nepo baby daughter after escaping a ‘rotten marriage’
- Goddess of Victory: NIKKE 2×2 LOVE Mini Game: How to Play, Rewards, and other details
- CookieRun: OvenSmash coupon codes and how to use them (March 2026)
- American Idol vet Caleb Flynn in solitary confinement after being charged for allegedly murdering wife
- Total Football free codes and how to redeem them (March 2026)
- Gold Rate Forecast
- Olivia Colman’s highest-rated drama hailed as “exceptional” is a must-see on TV tonight
- Nicole Kidman and Jamie Lee Curtis elevate new crime drama Scarpetta, which is streaming now
2026-02-13 18:45