Author: Denis Avetisyan
A new framework enables robotic manipulators to navigate complex, changing environments with greater robustness and responsiveness.
This work introduces SMART, a tightly-coupled particle-based mapping and Model Predictive Path Integral control system for reactive and collision-free robot manipulation.
Effective robot navigation hinges on accurate perception and planning, yet traditional approaches often treat environmental dynamics as static, hindering performance in complex scenarios. This is addressed in ‘Reactive Motion Generation With Particle-Based Perception in Dynamic Environments’, which introduces a novel framework-SMART-that tightly couples dynamic particle-based mapping with an obstacle-aware Model Predictive Path Integral (MPPI) controller. This integration enables robust, reactive collision avoidance by explicitly modeling and propagating both robot and obstacle dynamics under uncertainty, demonstrably improving safety and performance over state-of-the-art baselines. Could this approach pave the way for more adaptable and intelligent robotic systems capable of navigating truly unpredictable environments?
Deconstructing the Static World: Navigating Unpredictability
Robotic navigation, while increasingly sophisticated, frequently encounters limitations when confronted with the realities of complex, unpredictable environments. Traditional algorithms often assume a largely static world, building maps and planning paths based on the presumption that obstacles remain fixed. However, real-world scenarios – bustling city streets, crowded warehouses, or even domestic homes – are inherently dynamic, filled with moving pedestrians, vehicles, and objects. This poses a significant challenge, as robots relying on static maps struggle to accurately perceive their surroundings and predict future states, increasing the risk of collisions and hindering efficient path planning. The difficulty lies not merely in detecting movement, but in interpreting that movement – discerning intent, predicting trajectories, and adapting plans in real-time to avoid both static and dynamic obstructions. Consequently, advancements in robust perception and adaptive planning are crucial for enabling robots to operate safely and effectively in these genuinely unpredictable settings.
Conventional robotic mapping strategies frequently operate under the presumption of a largely static world, a simplification that introduces significant limitations when encountering dynamic environments. These techniques excel at creating detailed representations of fixed landscapes, but struggle to accurately incorporate moving objects or predict their future positions. Consequently, robots relying on such maps may misinterpret sensor data, leading to flawed path planning and an increased risk of collisions with previously unmapped or repositioned obstacles. The inherent difficulty lies in differentiating between temporary obstructions and permanent features, and in extrapolating the trajectories of moving elements to anticipate future spatial conflicts – a critical failing when navigating bustling human spaces or unpredictable industrial settings. This reliance on static assumptions necessitates the development of more adaptive and predictive mapping algorithms to ensure robust and safe robotic operation in real-world scenarios.
For robots to reliably function within real-world settings, robust perception and planning capabilities are paramount; static environments are the exception, not the rule. Successfully navigating dynamic scenes requires more than simply identifying obstacles-it demands predictive understanding of their movement, coupled with the capacity to replan trajectories in real-time. This involves fusing data from multiple sensors to build a coherent understanding of the surroundings, anticipating potential collisions, and generating safe, efficient paths around moving objects. Without this integrated approach to sensing and decision-making, robotic systems remain vulnerable to unexpected changes, hindering their effectiveness and posing safety risks in increasingly complex operational spaces. The development of algorithms capable of such adaptability is therefore central to realizing the full potential of robotics across a wide range of applications.
While robotic navigation has benefited from approaches like Ewok, K3DOM, and DSP Map – each offering foundational capabilities in environmental representation – these methods currently exhibit limitations when confronted with genuinely dynamic surroundings. These systems often struggle to effectively integrate real-time changes, such as the unpredictable movement of people or objects, into their internal maps and subsequent path planning. The core issue lies in their reliance on either infrequent updates or simplified models of motion, leading to inaccuracies in predicting future states and increasing the risk of collisions. Consequently, a substantial gap remains between these baseline functionalities and the level of robustness required for robots to operate reliably and autonomously in complex, ever-changing real-world scenarios, necessitating the development of more sophisticated perception and planning algorithms.
G-DSP Map: Beyond Static Representations
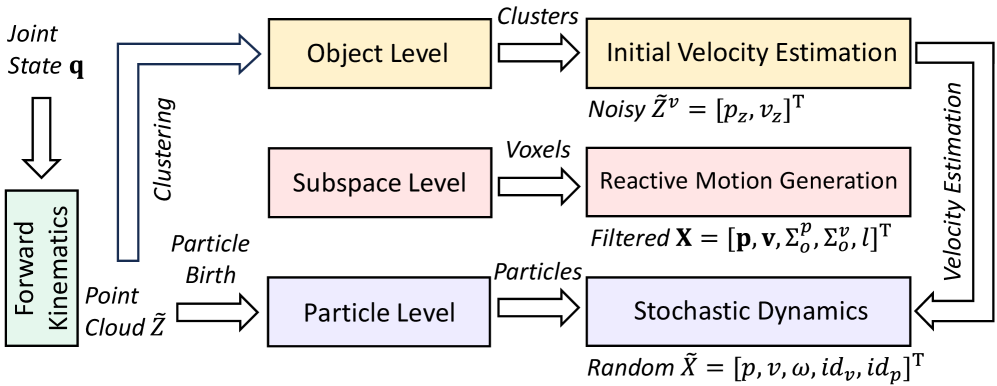
The G-DSP Map utilizes a global dual-structure particle map to represent the perceived environment, extending beyond simple occupancy grids by simultaneously estimating the position, velocity, and associated uncertainty of detected obstacles. This is achieved through a probabilistic approach where each obstacle is represented by a set of particles, each possessing a state vector defining its estimated position and velocity, as well as a weight reflecting the confidence in that estimate. The ‘dual-structure’ refers to the maintenance of separate particle sets for both occupancy and velocity, allowing for independent updates based on sensor data and motion models. Uncertainty is explicitly modeled through the particle dispersion and weight distribution, providing a measure of confidence in the estimated obstacle states, crucial for downstream decision-making and path planning.
The G-DSP Map utilizes a Sequential Monte Carlo Particle Filter (SMC-PHD Filter) to maintain track of multiple moving objects within the environment. This filter operates by representing the state of each dynamic object – position and velocity – as a set of weighted particles. These particles are propagated through time based on a motion model, and their weights are updated based on sensor measurements. The Probability Hypothesis Density (PHD) formulation within the SMC-PHD Filter allows for the simultaneous tracking of multiple objects, even with limited or noisy sensor data, by representing the density of possible object states rather than individual object identities. Particle depletion and resampling techniques are employed to maintain a manageable particle set and focus computational effort on the most likely object states, thus enabling robust multi-object tracking.
G-DSP Map achieves computational efficiency through the implementation of Tensor Optimization techniques. This involves reformulating the Sequential Monte Carlo Particle Filter (SMC-PHD Filter) update steps as tensor operations, enabling parallel processing on modern hardware such as GPUs. By exploiting the inherent parallelism of tensor algebra, G-DSP Map significantly reduces processing time compared to traditional scalar-based implementations. This optimization allows for real-time operation, maintaining a high update rate even when processing data from complex environments with numerous dynamic objects, and facilitating its use in applications requiring low-latency perception.
G-DSP Map distinguishes itself from traditional occupancy grid maps by simultaneously estimating both the presence of obstacles and their velocities. Standard occupancy maps solely represent static environmental features, providing limited information for predicting future states. By integrating velocity estimation into its representation, G-DSP Map generates a dynamic world model capable of representing not just where obstacles are, but also how they are moving. This richer representation is critical for applications requiring predictive capabilities, such as path planning, collision avoidance, and behavioral prediction of surrounding agents, enabling more informed and proactive decision-making in dynamic environments. The map’s output includes a probability distribution over both position and velocity for each tracked object, quantified with associated uncertainties.
D-STORM: Anticipating the Unpredictable
D-STORM represents an advancement of the Stochastic Trajectory Optimization for Motion Planning (STORM) framework by integrating predictive modeling of dynamic obstacles. While STORM primarily reacts to sensed obstacle positions, D-STORM incorporates estimations of future obstacle locations based on observed velocities and, potentially, acceleration. This predictive capability allows the planner to not only avoid current obstacles but also to anticipate potential collisions with obstacles in motion. The extension involves modifying the cost function within the STORM framework to penalize trajectories that approach predicted obstacle positions, effectively guiding the robot along safer paths. This proactive approach contrasts with reactive methods and enables improved performance in environments with high obstacle density and complex motion patterns.
D-STORM enhances collision avoidance by integrating dynamic obstacle tracking into its path planning process. Traditional methods often react to obstacles only as they are sensed, limiting performance in high-density or rapidly changing environments. D-STORM, however, explicitly models and predicts obstacle trajectories, allowing the planner to proactively adjust its path to avoid potential collisions before they occur. This predictive capability is particularly beneficial in scenarios with non-holonomic constraints or uncertain obstacle behavior, demonstrably reducing the frequency of near-misses and improving overall navigation success rates in crowded and unpredictable settings.
The predictive collision avoidance in D-STORM is achieved by incorporating models of obstacle dynamics into the path planning process. These models estimate future obstacle positions based on observed velocities and, potentially, acceleration data. By projecting obstacle trajectories forward in time, the planner can evaluate potential collisions before they occur. This allows D-STORM to proactively adjust its planned trajectory, selecting paths that maintain a safe distance from predicted obstacle locations. The accuracy of this prediction directly impacts the effectiveness of collision avoidance; therefore, the system may employ filtering or estimation techniques to refine obstacle state predictions and reduce uncertainty.
D-STORM employs Model Predictive Path Integral (MPPI) control as its trajectory optimization method. MPPI functions by sampling multiple possible trajectories and evaluating their cost based on factors such as collision risk, distance to the goal, and control effort. This sampling process is guided by a probabilistic model that incorporates both the robot’s dynamics and the predicted movements of dynamic obstacles. The algorithm then iteratively refines these trajectories, biasing the sampling towards paths with lower costs. Crucially, MPPI avoids explicit optimization, instead relying on stochastic sampling and a weighted acceptance criterion to efficiently converge on a safe and optimal trajectory within the planning horizon. The resulting path represents the most probable solution given the current state and predicted environment.
![D-STORM propagates system dynamics by sampling control sequences with importance weighting, explicitly modeling obstacle uncertainty via covariance, and aligning the prediction horizon with robot motion using a time step of [latex]\mathbf{dt}[/latex] to calculate immediate collision costs.](https://arxiv.org/html/2602.16462v1/x4.png)
SMART: A Synergistic System for Robust Autonomy
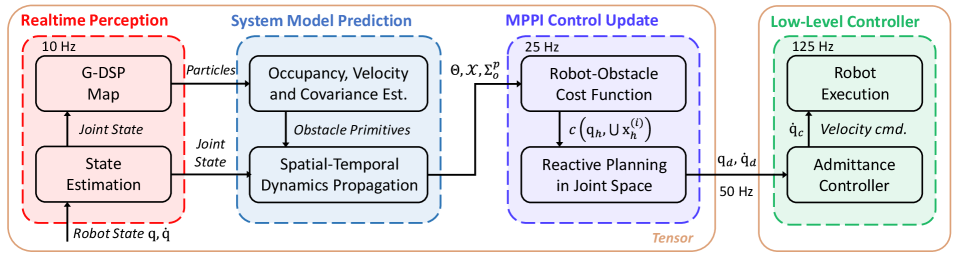
The SMART framework establishes a novel synergy between perception and planning, achieving robust autonomy through the integrated use of the G-DSP Map and D-STORM. The G-DSP Map provides a resilient perceptual foundation, effectively representing the surrounding environment even amidst sensor noise and incomplete data-a critical advantage in real-world scenarios. This perceptual output is then directly fed into D-STORM, a real-time predictive planning algorithm capable of anticipating future states and generating dynamically feasible trajectories. By tightly coupling these two components, SMART transcends the limitations of traditional sequential approaches, enabling a robot to not only sense its environment but to proactively plan for it, resulting in significantly improved performance and safety in complex, unstructured spaces.
Robotic operation in real-world settings demands adaptability, and the presented framework achieves precisely that by enabling safe and efficient navigation through unpredictable environments. Unlike prior systems often reliant on meticulously mapped spaces or struggling with unexpected movement, this approach fosters a synergistic link between perception and planning. This allows robots to not merely react to obstacles, but to anticipate and intelligently maneuver around dynamic elements like people or moving objects. The result is a substantial leap in autonomous capability, moving beyond constrained scenarios to true operational robustness-a critical advancement for applications ranging from warehouse logistics to search and rescue, and ultimately facilitating robotic deployment in complex, real-world conditions.
The newly developed framework exhibits a marked improvement in perceptual speed, achieving a two-fold increase compared to currently established state-of-the-art methodologies. This acceleration in processing visual and environmental data is not merely a quantitative improvement, but a fundamental enhancement to real-time responsiveness. By significantly reducing the time required to interpret surroundings, the system enables faster decision-making and more agile navigation. This heightened perceptual acuity is particularly crucial in complex and rapidly changing environments, allowing the system to react more effectively to unforeseen obstacles and dynamic conditions, ultimately fostering safer and more efficient autonomous operation.
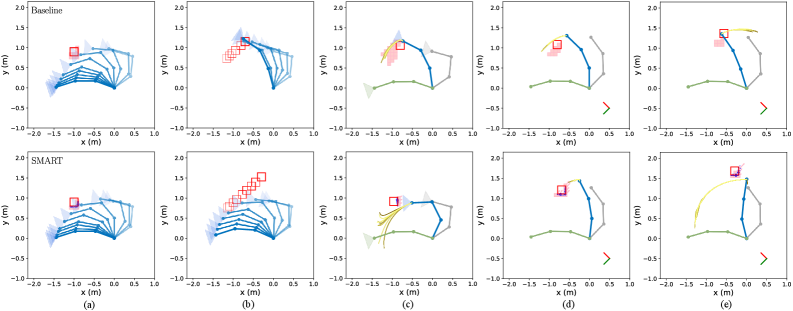
A key advancement offered by the SMART framework lies in its ability to dramatically reduce the delay between sensing the environment and reacting to it; demonstrated reductions in perception latency reach up to 100 milliseconds. This responsiveness is not merely a technical detail, but a critical factor in ensuring safe and effective collision avoidance, particularly when operating amongst moving obstacles. Rigorous testing confirms that SMART achieves a substantially higher success rate in dynamic environments compared to established methods like baseline STORM and DS-MPPI, indicating a significant leap forward in robotic autonomy and the capacity to navigate complex, real-world scenarios with greater reliability and efficiency.
![SMART consistently avoids collisions in dynamic scenarios with velocities of [latex]0.1[/latex] and [latex]0.2[/latex] m/s by explicitly modeling obstacle motion, unlike baseline methods which struggle with fast-moving obstacles due to probabilistic map inaccuracies and a failure to anticipate trajectories.](https://arxiv.org/html/2602.16462v1/x12.png)
The pursuit of robust robotic navigation, as demonstrated by SMART, inherently demands a willingness to challenge established norms. It’s a process of continually testing the boundaries of what’s possible, mirroring the sentiment expressed by Grace Hopper: “It’s easier to ask forgiveness than it is to get permission.” This approach is evident in the framework’s reliance on particle-based mapping, a method that embraces uncertainty and adapts to dynamic environments. Rather than rigidly adhering to pre-defined plans, the system intelligently reacts to unforeseen obstacles, effectively ‘breaking’ the initial assumptions to forge a new, safer path. This echoes the idea that true understanding comes not from passively accepting rules, but from actively probing and dismantling them – a core tenet of the research.
What Lies Beyond?
The presented framework, while demonstrating a capacity for reactive manipulation in complex settings, inevitably highlights the fragility of ‘knowing’ anything about a truly dynamic world. The particle-based map, a clever abstraction, still relies on sensor data-and sensors, by their nature, are limited interpreters of reality. Future work must confront the inevitable information deficit-not by striving for perfect sensing, a Sisyphean task, but by embracing uncertainty as a fundamental operating principle. The system’s performance, after all, is only as robust as its ability to anticipate what it doesn’t know.
A natural extension lies in questioning the optimization horizon itself. Current implementations treat time as a relatively smooth continuum. But what if the most critical information-the unpredictable swerve of an object, the sudden shift in a surface-arrives only at the last possible moment? Exploring event-triggered or asynchronous MPC schemes-algorithms that react to immediate necessity rather than pre-calculated trajectories-could yield a more resilient, if unsettlingly reactive, control paradigm.
Ultimately, the true test isn’t avoiding collisions, but exploiting them. A manipulator that anticipates contact-that understands the physics of impact and uses it to its advantage-moves beyond mere safety and towards a more nuanced, almost playful, interaction with the environment. Perhaps the next iteration won’t ask “how do things not collide?” but rather, “what interesting things happen when they do?”
Original article: https://arxiv.org/pdf/2602.16462.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- ‘Project Hail Mary’s Unexpected Post-Credits Scene Is Worth Sticking Around
- Beyond Accuracy: Gauging Trust in Human-AI Teams
- Gold Rate Forecast
- Clash Royale Balance Changes March 2026 — All Buffs, Nerfs & Reworks
- The most surprising Hannah Montana cameos: From John Cena to Dwayne Johnson and even a Coronation Street soap star as show celebrates its 20th anniversary
- eFootball 2026 is bringing the v5.3.1 update: What to expect and what’s coming
- Genshin Impact Version 6.5 Leaks: List of Upcoming banners, Maps, Endgame updates and more
- Total Football free codes and how to redeem them (March 2026)
- Brawl Stars Brawl Cup Pro Pass arrives with the Dragon Crow skin and Chroma, unique cosmetics, and more rewards
- We talked to ‘Bachelorette’ Taylor Frankie Paul. Then reality hit pause on her TV career
2026-02-20 05:38