Author: Denis Avetisyan
A new approach seamlessly integrates natural language understanding, formal planning, and behavior control to enable more effective collaboration between multiple robots.
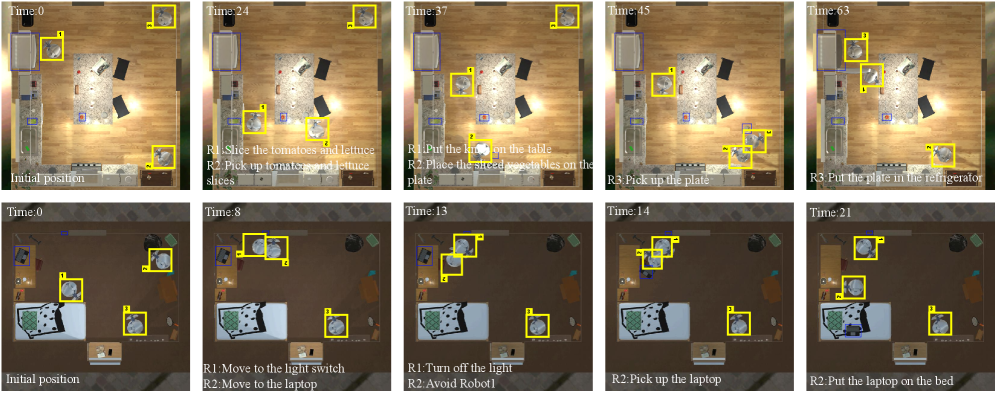
This work introduces H-AIM, a framework combining large language models, PDDL, and behavior trees for hierarchical multi-robot planning and task decomposition in complex environments like AI2-THOR.
Despite advances in embodied artificial intelligence, coordinating heterogeneous robot teams to execute complex, long-horizon tasks from high-level instructions remains a significant challenge. This paper introduces H-AIM: Orchestrating LLMs, PDDL, and Behavior Trees for Hierarchical Multi-Robot Planning, a novel framework that bridges the gap between instruction understanding and reactive execution by integrating large language models, formal planning, and behavior trees. Our approach achieves a substantial performance improvement-increasing task success from 12% to 55%-demonstrating the efficacy of hierarchical planning for multi-robot systems. Could this framework unlock more adaptable and intelligent robotic collaborations in dynamic, real-world environments?
The Illusion of Planning: Why It’s Always Harder Than It Looks
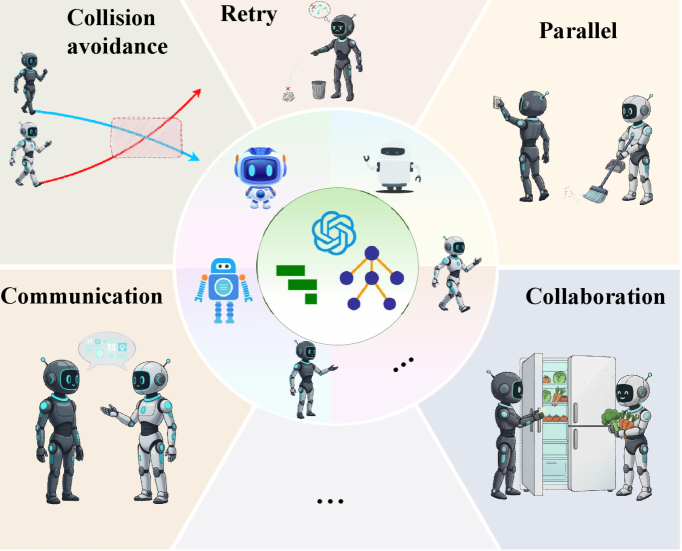
Conventional multi-robot planning methods frequently falter when confronted with tasks demanding intricate temporal coordination within realistic environments. These approaches typically assume simplified scenarios, struggling to account for the dynamic and uncertain nature of real-world operations-consider a warehouse where robots must collaboratively move goods while navigating obstacles and fluctuating demands. The core difficulty lies in the exponential growth of possible plans as the task duration increases and the number of robots involved expands; each robot’s actions become increasingly dependent on the precise timing and location of others. Consequently, generating feasible and efficient plans for even moderately complex, temporally-dependent tasks quickly becomes computationally intractable, limiting the applicability of these methods beyond highly constrained or simulated settings. This limitation underscores the need for novel planning frameworks capable of handling the inherent complexities of long-horizon, multi-robot coordination in dynamic, real-world scenarios.
Current multi-robot planning systems frequently demonstrate a rigidity that hinders performance when confronted with the unpredictable nature of real-world scenarios. These systems often rely on pre-defined plans and struggle to dynamically adjust to unexpected obstacles, robot failures, or changes in task priorities. Efficient coordination proves particularly elusive; many approaches treat robots as independent agents, leading to redundant efforts, collisions, or suboptimal task completion. The core limitation lies in the difficulty of establishing robust communication and shared understanding between robots, preventing them from collaboratively re-planning and adapting in response to unforeseen circumstances. Consequently, a significant gap remains between theoretical planning algorithms and their practical application in dynamic, complex environments where flexibility and collaborative adaptation are paramount.
The difficulty of coordinating multiple robots increases dramatically as the scope of the operation expands. This isn’t simply a matter of adding more calculations; the computational complexity of multi-robot path planning grows exponentially with each additional robot and each sequential step in the assigned task. This means doubling the number of robots, or adding just one more stage to a process, can require vastly more processing power and time. Researchers are actively exploring methods to mitigate this “combinatorial explosion”, including hierarchical planning, task decomposition, and leveraging approximations to find feasible, though not necessarily optimal, solutions within reasonable timeframes. Ultimately, achieving scalability is crucial for deploying multi-robot systems in real-world applications demanding complex, long-duration operations.
H-AIM: Bolting LLMs Onto Something That Might Actually Work
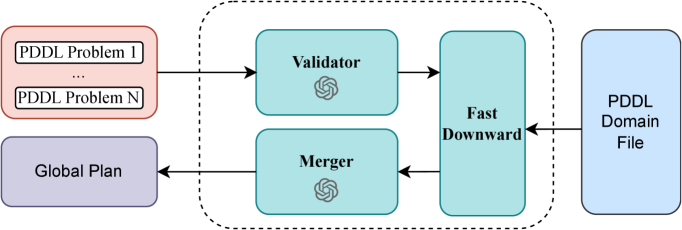
H-AIM utilizes a combined methodology by integrating the capabilities of Large Language Models (LLMs) with established classical formal planning techniques. LLMs provide strengths in semantic understanding, natural language processing, and task decomposition, allowing the system to interpret complex goals expressed in human-readable language. Classical formal planning, conversely, offers robust guarantees of correctness and completeness in finding executable action sequences. By combining these approaches, H-AIM aims to benefit from the LLM’s ability to handle ambiguity and high-level reasoning, while simultaneously leveraging the reliability and formal verification possible with traditional planning algorithms. This integration allows for a more flexible and robust approach to automated task planning than either technique could achieve independently.
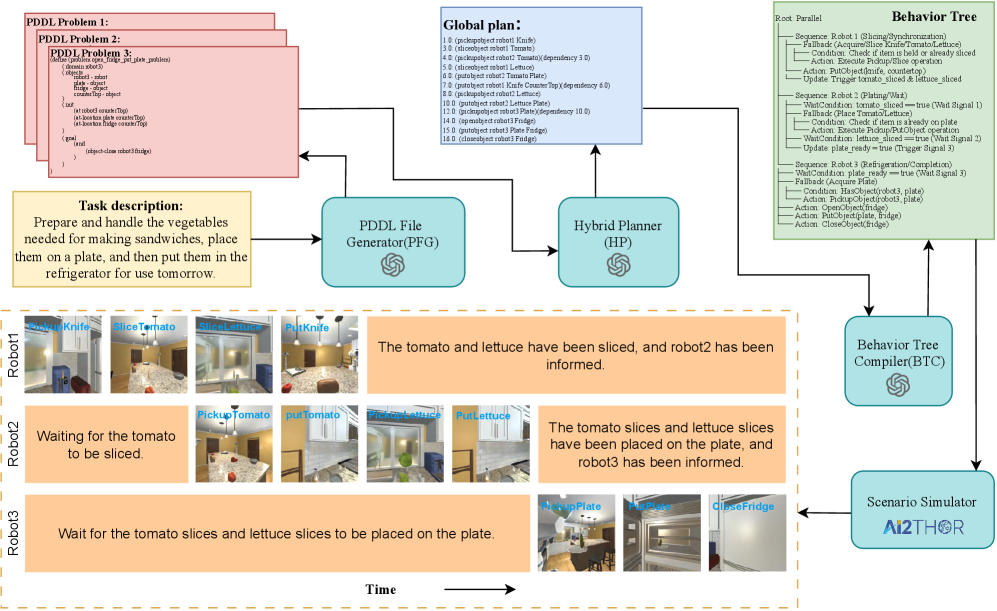
The Hybrid Planner (HP) functions by initially receiving a complex task expressed in natural language. It then employs a Large Language Model (LLM) to parse the input, achieving semantic understanding of the task’s objective and preconditions. Crucially, the LLM doesn’t directly generate a solution, but instead decomposes the complex task into a sequence of smaller, more manageable sub-tasks. This decomposition is guided by the LLM’s ability to identify logical steps and dependencies within the original task description. The output of this process is a structured representation of the task as a series of sub-goals, each suitable for subsequent processing by a classical planning algorithm.
The PDDL File Generator (PFG) component within H-AIM is responsible for converting natural language task instructions into a formal Plan Domain Definition Language (PDDL) representation. This translation process involves identifying relevant predicates, actions, and objects from the input text and structuring them according to PDDL syntax. The generated PDDL file then serves as input for classical planning algorithms, enabling them to search for a sequence of actions that achieve the specified goal state. The PFG utilizes semantic parsing and information extraction techniques to ensure accurate and complete translation, effectively bridging the gap between human-understandable instructions and machine-executable plans.
H-AIM’s capacity to reason across abstraction levels is achieved through the interplay of its components. The Hybrid Planner (HP) initially processes high-level goals expressed in natural language, utilizing the Large Language Model to decompose them into a sequence of sub-tasks. Subsequently, the PDDL File Generator converts these sub-tasks into a formal Planning Domain Definition Language (PDDL) representation. Classical planning algorithms then operate on this formal representation to determine a sequence of low-level, executable actions required to achieve each sub-task, effectively bridging the gap between abstract goals and concrete implementations. This tiered process enables H-AIM to address complex tasks by reasoning at both the semantic, goal-oriented level and the operational, action-based level.
From Plans to Reality: A Reactive Layer to Mask the Inevitable Failures
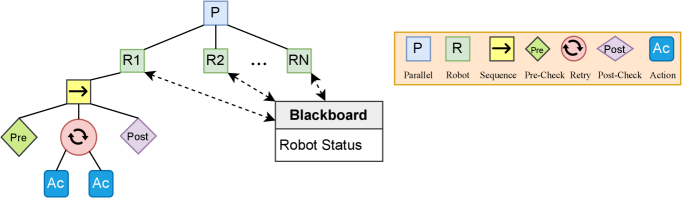
H-AIM employs Behavior Trees as the central mechanism for converting sequential, pre-defined plans into a runtime execution framework capable of reactivity and resilience. Traditional robotic planning often results in rigid, linear task execution; Behavior Trees address this limitation by representing plans as a graph-like structure where multiple tasks can be evaluated and executed in parallel. This allows the system to dynamically prioritize and switch between tasks based on real-time sensor data and environmental feedback. The resulting architecture facilitates robust operation even when faced with unexpected events or incomplete information, as the system can adapt its behavior without requiring complete re-planning.
The Behavior Tree Compiler (BTC) is a critical component in H-AIM’s execution framework, responsible for transforming a sequential, linear plan into a parallelized structure represented as a behavior tree. This compilation process decomposes the original plan into individual sub-tasks, which are then organized into nodes within the tree. The resulting tree structure allows multiple sub-tasks to be evaluated and executed concurrently, rather than sequentially. This parallelization significantly improves execution speed and, crucially, enables the system to continue progress on alternative sub-tasks even if one encounters an obstruction or fails, contributing to the system’s overall robustness and reactivity.
Concurrent execution of sub-tasks, facilitated by the Behavior Tree Compiler, enables robots to maintain progress on multiple objectives even when encountering unexpected environmental changes or obstacles. This is achieved through continuous monitoring of task status and the ability to dynamically re-prioritize or substitute tasks without halting overall plan execution. Reactive control mechanisms within the Behavior Tree framework allow for immediate responses to sensor data, triggering pre-defined behaviors – such as obstacle avoidance or re-planning – that adjust the robot’s actions in real-time. This contrasts with purely sequential planning, where a single failure necessitates complete re-evaluation of the entire plan, and allows for increased robustness and efficiency in dynamic environments.
The H-AIM architecture employs a Shared Blackboard as a central repository for runtime information accessible to all robots within the system. This blackboard contains dynamically updated data regarding the environment, task progress, and robot states. Robots utilize the blackboard to publish their observations, intentions, and completed actions, and simultaneously subscribe to relevant information generated by other robots. This mechanism enables decentralized coordination; robots can react to changes reported by peers without requiring a central command authority, and adjust their behaviors accordingly to avoid conflicts or capitalize on opportunities. The Shared Blackboard thereby facilitates collaborative task execution and improves overall system robustness.
So It Works… In Simulation. Now, Let’s See It Fail in the Real World
Evaluations conducted using the challenging MACE-THOR benchmark reveal that the Hierarchical Action-Integrated Model (H-AIM) substantially outperforms the LaMMA-P baseline in critical performance metrics. Specifically, H-AIM achieves a marked improvement in Task Success Rate, elevating performance from 12% to an impressive 55%. This signifies a considerable advancement in the model’s ability to formulate effective plans for multi-robot task completion. Complementing this improvement, H-AIM also demonstrates a significant gain in Goal Condition Recall, reaching 72% compared to LaMMA-P’s 32%. This heightened recall indicates that the model is more adept at accurately identifying and achieving the necessary conditions for task success, ultimately leading to more reliable and efficient outcomes in complex, simulated environments.
Evaluations conducted on the MACE-THOR benchmark reveal that the Hierarchical Action-Integrated Model (H-AIM) substantially elevates performance in multi-robot task planning, achieving a Task Success Rate of 55%. This represents a marked improvement over the baseline LaMMA-P method, which previously yielded a success rate of only 12%. The considerable increase demonstrates H-AIM’s capacity to formulate more effective strategies for coordinating robot actions, enabling a significantly higher proportion of assigned tasks to be completed successfully. This advancement is particularly noteworthy as it signifies a move towards more robust and reliable multi-robot systems capable of operating with increased autonomy and efficiency in complex environments.
Evaluations reveal that H-AIM substantially enhances a robot’s ability to correctly identify and remember the conditions necessary to complete a task, achieving a Goal Condition Recall of 72%. This represents a marked improvement over the 32% recall rate of the LaMMA-P method, indicating a more reliable and accurate understanding of task requirements. The increased recall suggests that H-AIM not only plans a sequence of actions but also maintains a stronger internal representation of the desired end-state, reducing the likelihood of incomplete or incorrect task execution. This heightened awareness of goal conditions is crucial for robust performance in complex, dynamic environments where robots must adapt to changing circumstances and unforeseen obstacles.
Evaluations reveal that H-AIM generates plans with markedly improved executability, a crucial metric for real-world robotic applications. Unlike methods that prioritize theoretical optimality without considering practical constraints, H-AIM focuses on creating plans that are not only logically sound but also readily achievable by the robotic agents. This is demonstrated through rigorous testing, where generated plans consistently exhibit a higher success rate when deployed in simulated and, increasingly, physical environments. The enhanced executability translates to fewer plan failures due to unforeseen obstacles or limitations in the robots’ capabilities, ultimately increasing the reliability and efficiency of multi-robot task completion. This characteristic positions H-AIM as a practical advancement, bridging the gap between algorithmic planning and dependable robotic action.
The pursuit of hierarchical planning, as demonstrated by H-AIM’s integration of LLMs, PDDL, and behavior trees, invariably introduces layers of abstraction. These layers, while initially promising elegance, quickly become points of failure. It’s a predictable trajectory. John von Neumann observed, “There is no possibility of absolute certainty.” This rings true; the framework attempts to manage complexity through decomposition, yet each decomposed task introduces a new set of potential errors. The system’s reliance on formal planning and LLM-generated tasks creates a brittle structure, elegantly designed on paper but destined to collide with the chaos of real-world execution. The architecture doesn’t solve the problem of uncertainty; it merely shifts the burden of managing it.
The Road Ahead (and It’s Usually Paved with Exceptions)
This H-AIM framework, a synthesis of LLMs, formal planning, and behavior trees, appears, on the surface, to address the perennial challenge of coordinating multi-robot systems. It’s elegantly complex, which is always a warning sign. The inevitable arrival of edge cases – the slightly askew object, the unexpected obstacle, the robot that simply decides it doesn’t like a task – will test the limits of even the most sophisticated task decomposition. One suspects the formal planning component will be the first to express its displeasure, demanding perfectly defined states that rarely exist outside of simulation.
The reliance on large language models, while currently fashionable, introduces its own set of vulnerabilities. LLMs are, fundamentally, stochastic parrots. Their apparent reasoning is often brittle, prone to hallucination, and exquisitely sensitive to prompt engineering. Expect a future filled with research attempting to reconcile the probabilistic nature of LLM outputs with the deterministic requirements of robotic control. Everything new is old again, just renamed and still broken.
Ultimately, the true measure of H-AIM, or any system like it, will not be its performance in a controlled environment, but its ability to degrade gracefully in the face of real-world chaos. Production is the best QA, after all. And one should always add a generous margin for error, because robots, like all things, will find a way to surprise you.
Original article: https://arxiv.org/pdf/2601.11063.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Clash Royale Best Boss Bandit Champion decks
- Vampire’s Fall 2 redeem codes and how to use them (June 2025)
- World Eternal Online promo codes and how to use them (September 2025)
- Best Arena 9 Decks in Clast Royale
- Country star who vanished from the spotlight 25 years ago resurfaces with viral Jessie James Decker duet
- ‘SNL’ host Finn Wolfhard has a ‘Stranger Things’ reunion and spoofs ‘Heated Rivalry’
- JJK’s Worst Character Already Created 2026’s Most Viral Anime Moment, & McDonald’s Is Cashing In
- Solo Leveling Season 3 release date and details: “It may continue or it may not. Personally, I really hope that it does.”
- M7 Pass Event Guide: All you need to know
- Kingdoms of Desire turns the Three Kingdoms era into an idle RPG power fantasy, now globally available
2026-01-19 22:51