Author: Denis Avetisyan
Researchers are drawing inspiration from the biological nervous system to create robotic control architectures that are more adaptable, efficient, and robust in dynamic environments.

This review details NeuroVLA, a biologically-inspired hierarchical system integrating vision-language understanding with neuromorphic control for improved robotic performance.
While current embodied intelligence systems rely on massive datasets, biological systems demonstrate an unparalleled ability to learn from sparse experience-a gap this work addresses through ‘A Brain-inspired Embodied Intelligence for Fluid and Fast Reflexive Robotics Control’. This paper introduces NeuroVLA, a novel hierarchical architecture inspired by the cerebellum and spinal cord, which integrates vision-language understanding with neuromorphic control to achieve robust, energy-efficient, and adaptable robotic reflexes. Demonstrating state-of-the-art performance on physical robots-including sub-20ms safety responses and significant energy savings-NeuroVLA exhibits emergent biological motor characteristics without specialized training. Could this bio-inspired approach unlock a new era of truly intelligent and responsive robotic systems?
Bridging the Gap: Biological Inspiration for Robotic Control
Conventional robotics frequently encounters limitations when confronted with the unpredictable demands of real-world environments. These machines often rely on centralized processing, where sensory data is relayed to a central computer for analysis and subsequent action commands. This architecture introduces delays that hinder performance in dynamic scenarios requiring swift, adaptive responses. Unlike the seamless integration observed in biological systems, where perception and action are tightly coupled, traditional robots struggle with tasks demanding fine motor control, spatial awareness, and the ability to react to unforeseen obstacles or changes. Consequently, even seemingly simple actions – grasping delicate objects, navigating uneven terrain, or collaborating with humans – present significant engineering challenges, highlighting the need for alternative approaches inspired by the efficiency of natural movement and control.
The remarkable agility and responsiveness of living organisms stem from a sophisticated interplay between sensory perception and motor control, a system robotics seeks to emulate. Biological nervous systems don’t simply react to stimuli; they interpret complex data from multiple sources – vision, touch, proprioception – and initiate remarkably fluid, adaptive movements. This isn’t achieved through centralized, sequential processing, but rather a distributed network where initial responses are incredibly fast and reflexive, while more deliberate actions are planned with a slight delay. By studying how biological systems prioritize speed versus accuracy – handling immediate threats with lightning-fast reflexes and complex tasks with considered movements – researchers aim to develop robotic systems capable of navigating unpredictable environments and executing intricate maneuvers with a similar level of grace and efficiency. This biomimetic approach promises to overcome the limitations of traditional robotics, paving the way for machines that are not just programmed, but truly responsive.
The efficiency of biological movement stems, in part, from a distributed architecture where immediate reactions bypass lengthy cognitive processes. Instead of relying on a centralized ‘brain’ to calculate every response, organisms utilize local circuits for swift reflexes – think of automatically withdrawing from a hot surface. This decentralized processing prioritizes speed for critical actions, while more complex, deliberative tasks are handled by higher-level neural structures with acceptable, though comparatively slower, latency. This tiered approach allows for both instantaneous protection and nuanced behavior, a model increasingly influencing robotics design as engineers seek to replicate the adaptability and robustness observed in natural systems. By offloading simple, time-sensitive actions to peripheral processing units, robots can achieve quicker responses and operate more effectively in unpredictable environments.

A Tri-Level Architecture for Computational Efficiency
The NeuroVLA architecture implements a tri-level computational hierarchy designed to manage varying latency demands. This system segregates processing into three distinct tiers: fast reflexes, mid-level adaptation, and high-level planning. The fastest tier handles immediate sensorimotor loops requiring responses within milliseconds. The mid-level tier addresses slower adaptation processes, operating on timescales of tens to hundreds of milliseconds. Finally, the highest tier is responsible for complex, semantic reasoning and long-term planning, with latency requirements measured in seconds or longer. This separation of concerns allows for optimized resource allocation and efficient computation across the entire system, prioritizing speed where necessary and enabling complex reasoning without hindering real-time responsiveness.
The Neuromorphic Chip Tier is designed for rapid, real-time processing of sensorimotor loops operating on the millisecond timescale. This tier leverages Spiking Neural Networks (SNNs) as its core computational element. SNNs more closely mimic biological neural processing than traditional artificial neural networks, allowing for event-driven computation and significantly reduced energy consumption. This efficiency is achieved by only activating neurons when receiving sufficient input, resulting in sparse activity and lower power demands compared to continuously active artificial neurons. The architecture prioritizes low-latency responses for immediate environmental interactions, making it suitable for tasks requiring fast reflexes and direct sensorimotor control.
The CUDA Computing Tier addresses slower, semantic reasoning tasks within the NeuroVLA architecture by utilizing a Q-Former network. This component processes information from the Neuromorphic Chip Tier and external sources to enable complex decision-making for motor control. The Q-Former functions as an information distillation module, reducing the dimensionality of input data into a compact state representation. This representation then informs higher-level action selection, facilitating tasks requiring deliberation and planning beyond the scope of rapid, reflex-based responses handled by the Neuromorphic Tier. The CUDA implementation leverages the parallel processing capabilities of GPUs to accelerate the Q-Former’s computations, balancing performance with the reduced latency requirements of this tier.
The NeuroVLA architecture implements a hierarchical division of labor analogous to biological nervous systems, enabling optimization of both processing speed and computational complexity. This is achieved by distributing tasks across three tiers based on temporal requirements: rapid sensorimotor reflexes are handled by the Neuromorphic Chip Tier, mid-level adaptation occurs within the CUDA Computing Tier, and high-level planning is performed at the semantic reasoning level. By assigning functions to specific tiers according to their latency needs, the system avoids bottlenecks and minimizes energy consumption, as each tier can operate with the appropriate computational resources and algorithmic complexity for its designated task.
![A neuromorphic processor implemented on an FPGA utilizes a [latex]20[/latex] MHz LIF systolic-array architecture and spike-sparsity-aware computation to achieve an inference latency of [latex]2.19[/latex] ms and an energy cost of [latex]0.87[/latex] mJ per inference, utilizing [latex]51,953[/latex] LUTs, [latex]27,880[/latex] FFs, and [latex]169[/latex] BRAMs.](https://arxiv.org/html/2601.14628v1/x7.png)
Spinal Cord Inspired Reflex Pathways
The Neuromorphic Chip Tier implements reflexes using Spiking Neural Networks (SNNs) modeled after the functional organization of the spinal cord. This bio-inspired approach prioritizes speed and decentralization by distributing processing across numerous interconnected nodes, mirroring the parallel architecture of biological neural circuits. Unlike traditional artificial neural networks that rely on rate coding, SNNs communicate using discrete spikes in time, enabling event-driven computation and reduced energy consumption. This architecture allows for rapid responses to stimuli without requiring centralized control, crucial for implementing fast, autonomous reflexes in robotic systems. The system’s design emphasizes localized processing to minimize latency and improve robustness against single-point failures, replicating the inherent fault tolerance observed in biological spinal circuits.
The Neuromorphic Chip Tier incorporates a Spiking Residual Network (Spiking ResNet) designed to process incoming tactile and proprioceptive data and generate rapid, stimulus-driven responses. This network architecture receives signals representing touch and body position, and utilizes spiking neurons to compute and transmit information. The Spiking ResNet is specifically engineered to bypass typical latency associated with conventional neural networks, enabling near-instantaneous reactions to physical interactions. This functionality is critical for implementing decentralized reflexes, mirroring the speed and efficiency of spinal cord-based responses without requiring communication with higher cortical areas.
Leaky Integrate-and-Fire (LIF) dynamics are implemented to accurately simulate the temporal behavior of spinal interneurons within the Neuromorphic Chip Tier. This model represents each neuron as an integrator that accumulates input signals; when the membrane potential reaches a threshold, a spike is generated, and the potential is reset. The “leaky” component introduces a decay of the membrane potential over time, mimicking the natural dissipation of ionic charge in biological neurons. This characteristic is crucial for modeling the refractory period and enabling realistic signal propagation delays and attenuation as signals travel through the network of interconnected interneurons, effectively capturing the stateful nature of spinal reflex pathways.
Spiking Neural Networks (SNNs) present training difficulties due to the non-differentiability of the spiking activation function; standard gradient-based learning algorithms cannot be directly applied. Surrogate Gradient Learning addresses this by approximating the derivative of the spiking function with a differentiable surrogate function during backpropagation. This allows gradients to flow through the network, enabling optimization using techniques like stochastic gradient descent. The surrogate gradient isn’t the true gradient of the spiking function, but serves as a sufficient substitute for effective learning, bridging the gap between the biological plausibility of SNNs and the practicality of gradient-based training methods.
Adaptive Control Inspired by the Cerebellum
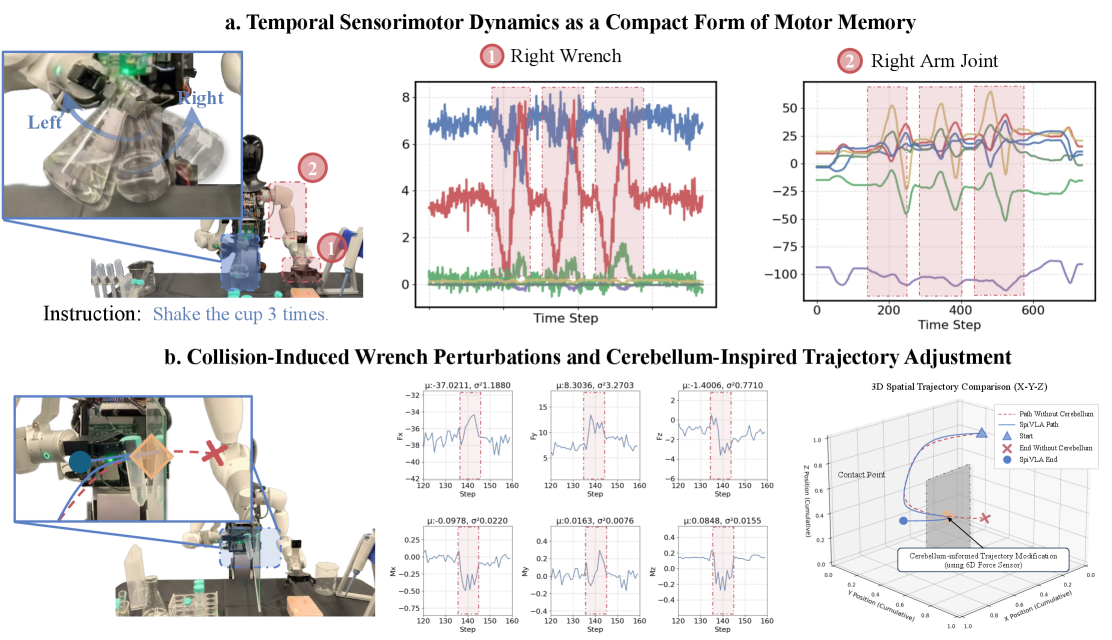
The cerebellum is critically involved in the refinement of motor commands, processing sensory feedback to correct ongoing movements and improve future actions. Our NeuroVLA framework replicates this functionality by integrating sensory input into a control loop that modifies cortical output. This allows the system to adapt to changing conditions and minimize deviations from desired trajectories, effectively smoothing movements and enhancing precision. The NeuroVLA achieves this refinement through a combination of recurrent state estimation and adaptive gating of motor commands, mirroring the cerebellum’s role in coordinating and calibrating movement based on real-time sensory information.
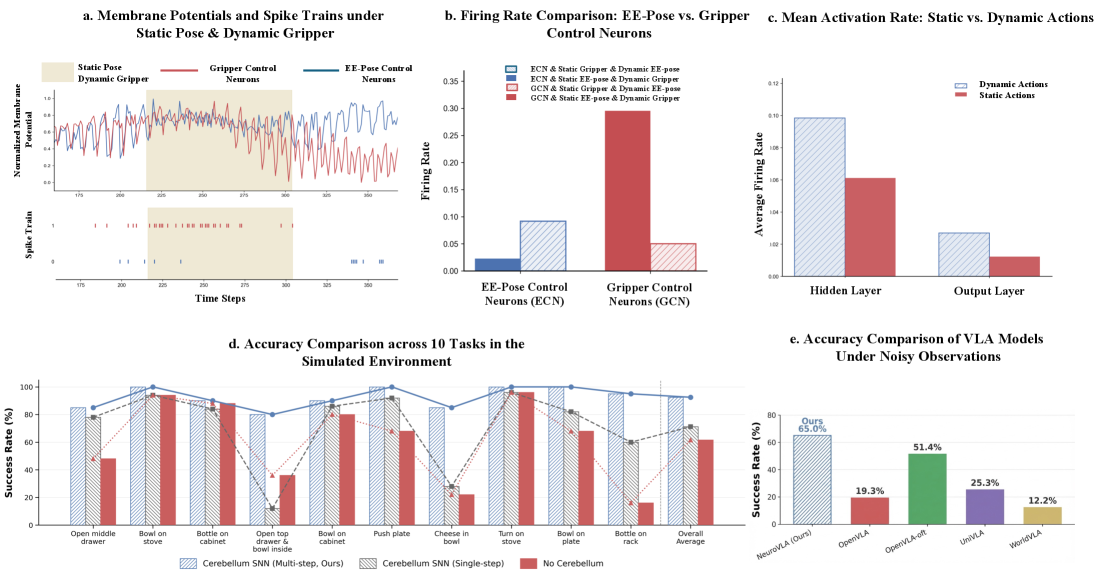
The NeuroVLA framework utilizes a Recurrent Gated Recurrent Unit (GRU) to model and leverage temporal dynamics within the control system. This GRU network processes sequential sensory data, enabling the prediction of future states and the anticipation of necessary corrective actions. By learning the temporal dependencies inherent in movement, the GRU can identify deviations from expected trajectories and proactively adjust motor commands. This predictive capability facilitates error correction before significant discrepancies occur, contributing to smoother and more efficient control, and ultimately reducing kinematic jerk and commanded acceleration as demonstrated in performance metrics.
Gated Feature-wise Linear Modulation (GFLM) within the NeuroVLA framework dynamically scales cortical motor commands based on the current physical state of the system. This process utilizes learned feature-wise scaling factors, modulated by gating signals, to adjust the magnitude of each command element. The gating mechanism selectively emphasizes or suppresses specific features of the state, allowing for precise and context-dependent refinement of motor output. By applying these scaling factors, the system effectively fine-tunes action in real-time, enabling adaptive responses to changing conditions and contributing to smoother, more efficient movement.
The integration of adaptive control, leveraging cerebellar-inspired mechanisms, with the speed of spinal reflexes results in demonstrably improved motor performance. Quantitative analysis reveals a significant 75.6% reduction in kinematic jerk, indicating smoother and more fluid movements. Furthermore, mean absolute commanded acceleration is reduced by between 32.8% and 58.0%, demonstrating a substantial decrease in the magnitude of required motor commands to achieve a given task. These metrics collectively highlight the system’s capacity to generate robust and nuanced behaviors through optimized motor control strategies.
Validation, Impact, and Future Directions
The NeuroVLA architecture underwent rigorous validation through the LIBERO Benchmark, a demanding robotics challenge designed to assess complex manipulation capabilities. This benchmark requires a robot to perform intricate tasks, pushing the boundaries of its dexterity, planning, and adaptability – skills crucial for real-world applications. Successfully navigating LIBERO necessitates not only precise motor control but also robust perception and the ability to recover from unexpected disturbances. The framework’s performance on this benchmark demonstrates its capacity to handle the nuances of physical interaction, proving its potential as a foundational element in advanced robotic systems and embodied artificial intelligence.
The newly developed NeuroVLA framework exhibits a significant advancement in robotic resilience, demonstrably outperforming conventional approaches when confronted with real-world disturbances. Rigorous testing reveals a remarkable 54.8% recovery rate from unexpected physical collisions – a critical metric for robots operating in dynamic and unpredictable environments. This enhanced capability stems from the architecture’s ability to rapidly adapt and maintain stability following impact, minimizing downtime and potential damage. The framework doesn’t merely react to collisions; it proactively mitigates their effects, allowing for continued task execution even under challenging physical conditions. This represents a substantial step towards creating more robust and reliable robotic systems capable of seamless integration into human-centric environments.
The NeuroVLA framework demonstrates significant gains in computational efficiency through the implementation of Event-Driven Sparsity. This technique focuses processing power only on the most pertinent incoming data, drastically reducing unnecessary calculations. Consequently, the framework achieves an impressively low inference latency of 2.19 milliseconds – a speed critical for real-time robotic control. Furthermore, this selective processing translates directly into substantial energy savings, with each inference requiring only 0.87 millijoules. These figures suggest the potential for deploying complex robotic systems on resource-constrained platforms, paving the way for more sustainable and accessible artificial intelligence applications.
The developed framework’s potential extends beyond current benchmarks, with ongoing research dedicated to its application in increasingly intricate challenges. Investigations are now centering on scaling the architecture to handle tasks demanding more nuanced manipulation and decision-making capabilities, paving the way for robust embodied AI systems. This includes exploring its integration with advanced robotic platforms and simulation environments to facilitate continuous learning and adaptation in real-world scenarios. Ultimately, the goal is to create intelligent agents capable of seamlessly interacting with and navigating complex physical environments, demonstrating a new level of autonomy and problem-solving prowess in robotics and artificial intelligence.
![The neuromorphic spinal substrate exhibits emergent functional specialization and latent disentanglement, spontaneously organizing neural subpopulations to encode kinematic dimensions like [latex]|\Delta Roll|[/latex] and gripper control, and intrinsically clustering high-dimensional control signals into discrete behavioral modes without explicit supervision, mirroring the modularity of the biological motor cortex.](https://arxiv.org/html/2601.14628v1/x6.png)
The presented NeuroVLA architecture, with its hierarchical integration of vision, language, and action, echoes a fundamental principle of mathematical elegance: decomposition into provable components. The system’s reliance on spiking neural networks, mirroring the cerebellum and spinal cord, isn’t merely an attempt at biological plausibility, but a pursuit of inherent computational efficiency. As Brian Kernighan aptly stated, “Debugging is twice as hard as writing the code in the first place. Therefore, if you write the code as cleverly as possible, you are, by definition, not smart enough to debug it.” This sentiment applies directly to NeuroVLA; the modular design and biologically-inspired constraints aim to simplify verification and ensure a demonstrably correct, rather than merely functional, system. The pursuit of robustness, efficiency, and adaptability isn’t simply about achieving performance; it’s about constructing a solution grounded in demonstrable principles.
Beyond Reflex: Charting Future Directions
The presented NeuroVLA architecture, while a step towards biologically plausible control, merely scratches the surface of genuine intelligence. The demonstrated linkage of vision, language, and action, though functional, remains largely a demonstration of mapping rather than understanding. True robustness will not emerge from increased dataset size, but from a formalization of invariant properties-a mathematical guarantee of performance regardless of environmental perturbations. The current reliance on supervised learning, even within a neuromorphic framework, introduces a fragility inconsistent with the adaptability observed in biological systems.
Future work must prioritize the development of intrinsic motivation and unsupervised learning paradigms. The cerebellum, superficially modeled here, operates on principles of error correction and predictive coding-a far cry from the present implementation. A rigorous exploration of spiking neural network dynamics, moving beyond rate coding approximations, is essential. The elegance of the spinal cord lies in its compositional structure-a modularity absent in most contemporary robotics control systems.
Ultimately, the field requires a shift in perspective. The goal should not be to simulate intelligence, but to construct it, based on first principles. Only when algorithms are judged by their provable correctness, rather than empirical performance on benchmark tasks, will truly intelligent machines emerge. The illusion of fluidity is not enough; the underlying logic must be unimpeachable.
Original article: https://arxiv.org/pdf/2601.14628.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Invincible Season 4 Episode 4 Release Date, Time, Where to Watch
- Physics Proved by AI: A New Era for Automated Reasoning
- Gold Rate Forecast
- American Idol vet Caleb Flynn in solitary confinement after being charged for allegedly murdering wife
- Magicmon: World redeem codes and how to use them (March 2026)
- “Wild, brilliant, emotional”: 10 best dynasty drama series to watch on BBC, ITV, Netflix and more
- Total Football free codes and how to redeem them (March 2026)
- Goddess of Victory: NIKKE 2×2 LOVE Mini Game: How to Play, Rewards, and other details
- Invincible Creator on Why More Spin-offs Haven’t Happened Yet
- Simulating Humans to Build Better Robots
2026-01-22 18:09