Author: Denis Avetisyan
Researchers have developed a formal system for verifying the correctness of robot actions, ensuring reliable performance in complex tasks.
This work introduces the Law of Task-Achieving Body Motion, providing a mathematically rigorous foundation for semantic understanding, causal reasoning, and embodied robot control.
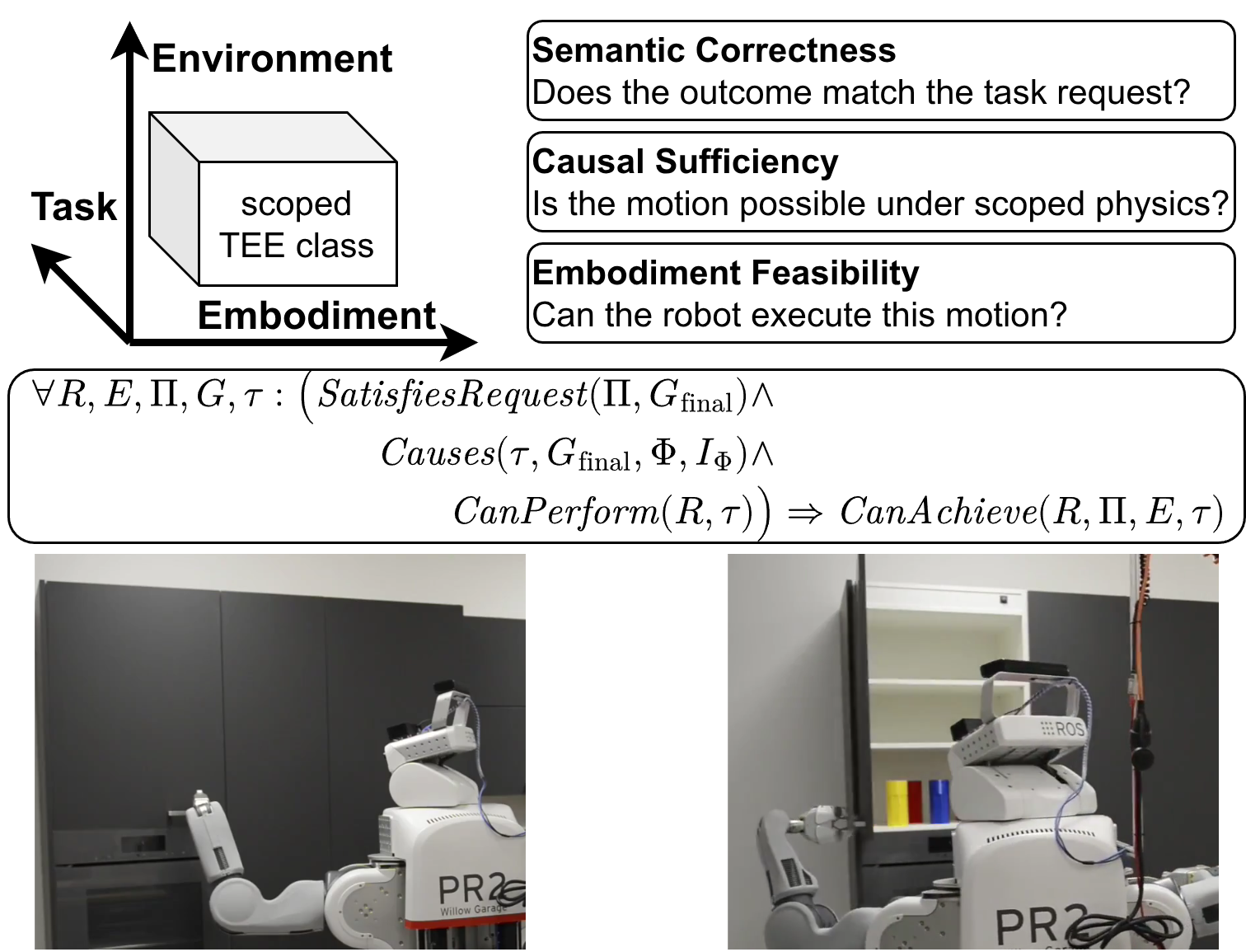
Ensuring robots reliably perform everyday tasks requires bridging the gap between high-level goals and physically feasible actions, a challenge complicated by the need for semantic correctness, causal validity, and embodiment feasibility. This paper introduces ‘The Law of Task-Achieving Body Motion: Axiomatizing Success of Robot Manipulation Actions’, presenting an axiomatic framework that formally decomposes successful robot manipulation into three key predicates-satisfying requests, ensuring causal sufficiency, and verifying embodiment constraints-within scoped environments defined as Semantic Digital Twins. This decomposition yields a reusable interface for both motion synthesis and verification, enabling typed failure diagnosis and facilitating feasibility across diverse robotic platforms. Could this formalization unlock more robust and adaptable robot behavior in complex, real-world scenarios?
The Inevitable Drift: Why Robotic Reliability Demands Rigor
Conventional robotic control often depends on simplifying assumptions and estimations of the physical world, introducing inherent inaccuracies into a robot’s actions. This reliance on approximations-whether in modeling friction, predicting sensor noise, or estimating an object’s position-accumulates over time, leading to unpredictable behavior and a heightened risk of task failure. While seemingly minor, these discrepancies can compound, causing a robot to deviate from its intended path, grasp an object incorrectly, or even collide with its surroundings. Consequently, despite advances in hardware and algorithms, the practical deployment of robots in complex, real-world scenarios remains challenging due to this fundamental uncertainty in achieving consistently reliable outcomes.
The pursuit of truly reliable robotic systems demands a shift from traditional control methods to formal verification – a rigorous process of mathematically proving a robot will consistently achieve its goals. Recent advances, exemplified by the development of the Law of Task-Achieving Body Motion, establish a foundational principle for this verification. This law doesn’t simply assess if a robot completes a task, but definitively proves why it will succeed, considering the complex interplay between the robot’s mechanics, its environment, and the intended objective. By formally defining the necessary conditions for task completion, researchers are building systems capable of guaranteeing successful operation, even in unpredictable scenarios, moving beyond mere probabilistic performance to demonstrable certainty and unlocking the potential for robots in critical applications.
Robust robotic performance demands more than simply observing a robot’s actions; a comprehensive understanding of its operational rationale is crucial. Current approaches often focus on what a robot does – the sequence of movements – but fall short in explaining why those movements succeed or fail in a given context. A truly reliable system necessitates the capacity to reason about the underlying principles governing a robot’s behavior, factoring in environmental dynamics and potential disturbances. This means moving beyond purely kinematic or dynamic models to incorporate a deeper understanding of the robot’s interaction with its surroundings, allowing for predictive analysis and proactive adaptation. Consequently, verification processes must assess not only if a robot completes a task, but also if it can consistently achieve the desired outcome based on demonstrable, logical principles within its operating environment.
Constructing a Cognitive Map: The Semantic Digital Twin
A Semantic Digital Twin (SDT) facilitates robotic comprehension of an environment through a formalized, structured representation of its constituent elements and their relationships. This representation moves beyond simple geometric mapping to incorporate semantic information – defining objects not just by their shape and location, but also by their function and properties. The SDT achieves this through the use of ontologies and knowledge graphs, which establish a vocabulary and framework for describing the environment in a machine-readable format. This allows the robot to move beyond perceiving raw sensor data and instead ‘understand’ the environment in terms of actionable knowledge, such as identifying graspable objects, navigable pathways, and the functional purpose of different areas within the space.
The foundation of environmental understanding within the Semantic Digital Twin is a Physics Model that simulates physical interactions with a high degree of accuracy. This model isn’t simply a visual representation; it incorporates parameters for object mass, friction, gravity, and collision detection, allowing the system to predict the outcomes of actions before they are executed. Specifically, the model calculates the forces exerted during manipulation, the stability of arrangements, and the likely trajectories of objects. This predictive capability is crucial for informed decision-making, enabling the robot to plan actions that are both feasible and safe, and to anticipate potential consequences before committing to a course of action. The model’s output directly influences action selection and ensures the robot operates within the constraints of the physical world.
The Semantic Digital Twin achieves semantic correctness by integrating environmental knowledge with action verification using predicates, specifically ‘SatisfiesRequest’. This predicate-based approach allows the system to confirm whether a proposed action fulfills the intended objective within the simulated environment before execution. Validation has been performed across two distinct kitchen environments, demonstrating the twin’s capacity to maintain semantic accuracy in varying spatial configurations and object arrangements. The successful testing in multiple environments confirms the robustness of this verification mechanism for robotic task planning and execution.
Grounding Action in Reality: The Physics-Informed Control System
Learning-based control systems utilize a digital twin – a virtual replica of the physical robot and its environment – as a primary training ground for control policies. This approach allows for extensive experimentation without the risks and costs associated with real-world interaction. A key technique employed within this training process is Domain Randomization, where simulation parameters – such as friction, mass, and lighting – are varied randomly during each training episode. By exposing the learning agent to a wide range of simulated conditions, the resulting control policy becomes more robust and generalizes better to the inevitable discrepancies between the simulated and real environments, improving performance when deployed on the physical robot.
The physics model within the digital twin facilitates accurate prediction of robot action outcomes by simulating the physical interactions between the robot and its environment. This predictive capability is crucial for learning-based control, as it allows control policies to be evaluated and refined in simulation before deployment on real hardware. By accurately forecasting the results of actions – such as grasping, pushing, or locomotion – the system can optimize policy parameters to maximize performance and minimize errors. This simulation-based optimization significantly reduces the need for costly and time-consuming real-world experimentation, accelerating the development and deployment of robust control strategies. Furthermore, the ability to predict outcomes enables the implementation of model-based reinforcement learning and trajectory optimization techniques.
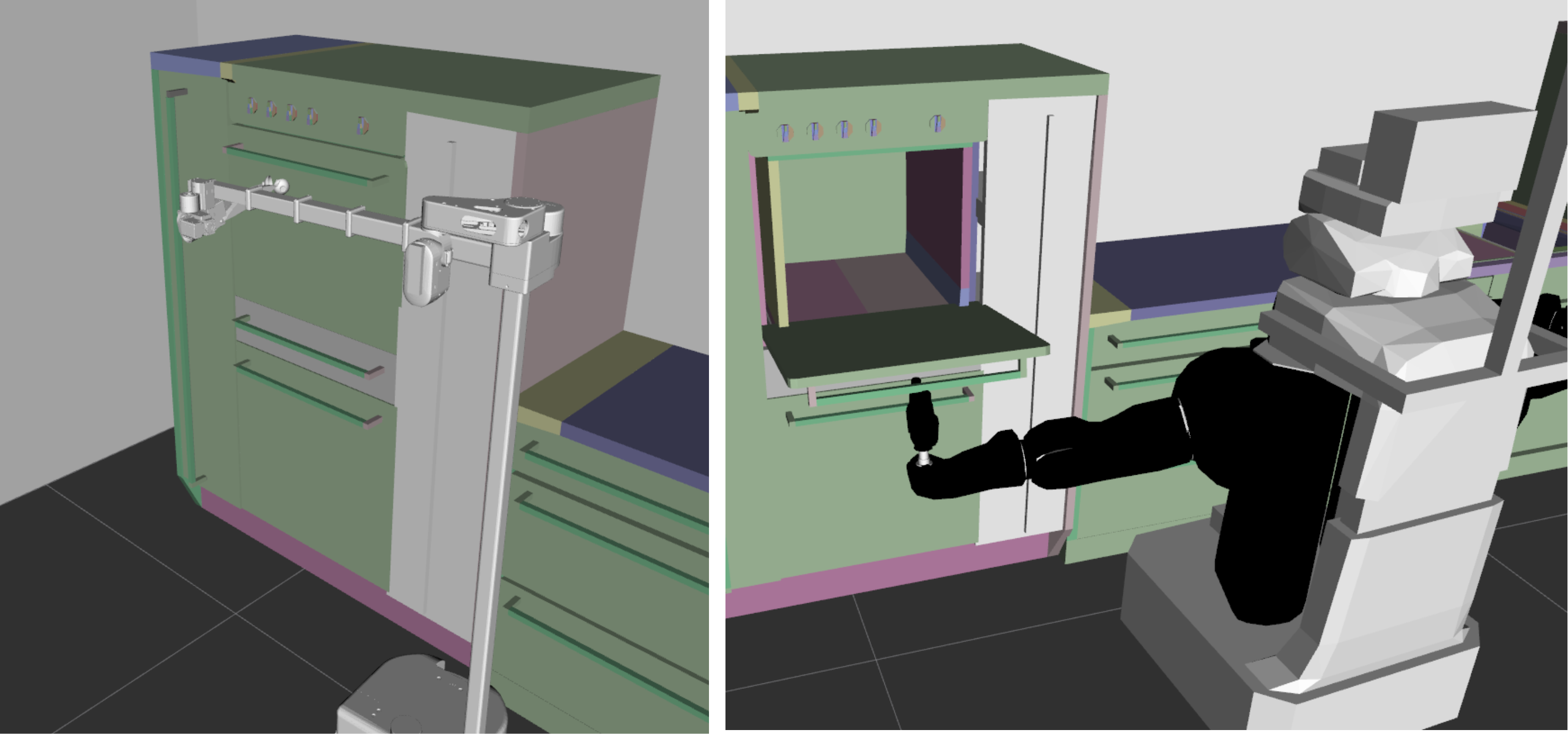
Factorized physics addresses the complexity of robotic control by decoupling the robot’s kinematic motion from the dynamics of its environment. This separation allows for independent modeling and analysis of each component, increasing computational efficiency and control precision. The framework achieves this by representing the robot’s actions as changes in its internal state, while the environment’s response is modeled as a separate, reactive system. This approach has been validated through implementation and testing on three distinct robotic platforms: the PR2, the TIAGo++, and the Stretch robot, demonstrating its adaptability and generalizability across varying robot morphologies and operational contexts.
Shielding Autonomy: Ensuring Safe and Reliable Operation
To address the inherent risks of deploying reinforcement learning in real-world scenarios, a safety mechanism termed ‘shielding’ has been developed. This approach integrates formal verification-a rigorous mathematical proof of system correctness-with runtime monitoring, which observes the algorithm’s behavior during execution. Formal verification establishes the boundaries of safe operation before deployment, defining what constitutes an acceptable state for the system. Runtime monitoring then acts as a vigilant guardian, continuously checking if the reinforcement learning agent’s proposed actions would violate these pre-defined safety constraints. If an unsafe action is detected, the shield intervenes, preventing its execution and guiding the agent toward a safer alternative. This dual-layered defense creates a robust system, allowing the agent to explore and learn without risking damage to itself, its environment, or other entities, and ultimately fostering trust in autonomous operation.
Integrating a protective ‘shield’ with a digital twin’s predictive modeling capabilities fundamentally alters how robots navigate complex tasks while adhering to safety protocols. This methodology doesn’t simply react to potential hazards, but proactively anticipates them by simulating actions within the digital twin before physical execution. Recent trials involving a container opening task revealed that success rates aren’t uniform; performance fluctuates significantly based on the robot’s physical embodiment and the specifics of its operating environment – a phenomenon visually detailed in Figure 3. This highlights the crucial interplay between a robot’s morphology and its ability to adapt to nuanced real-world conditions, reinforcing the need for tailored safety constraints and predictive modeling that account for these embodiment-specific limitations.
The integration of formally verified reinforcement learning with runtime monitoring yields a system capable of executing intricate tasks with unprecedented dependability. This isn’t merely about improved performance; it’s about establishing a foundation of trust in autonomous agents. By proactively preventing unsafe actions and leveraging predictive capabilities, the system facilitates complex operations – such as manipulation and navigation – while consistently adhering to predefined safety boundaries. This level of robustness is critical for real-world deployment, effectively removing a significant barrier to genuinely autonomous operation in dynamic and unpredictable environments, and opening possibilities for applications ranging from industrial automation to personal robotics.
The pursuit of axiomatic correctness, as detailed in the paper’s formulation of the Law of Task-Achieving Body Motion, inherently acknowledges the transient nature of any formalized system. This work, striving to define verifiable robot manipulation, implicitly concedes that even the most rigorous framework will accrue complexities over time. As John von Neumann observed, “There is no possibility of absolute certainty.” The paper’s emphasis on scoped environments and explicit requirements isn’t a claim of perfect solutions, but rather a recognition that managing the inevitable decay of a system – minimizing ‘technical debt,’ if you will – necessitates precise boundaries and a clear understanding of causal validity. The Law isn’t a final destination, but a carefully considered calibration against entropy.
The Horizon of Action
The formalization of task-achieving body motion, as presented, does not eliminate uncertainty-it merely relocates it. Every failure is a signal from time, indicating a discrepancy between axiomatic prediction and embodied reality. The framework’s strength lies in its explicit demands: semantic understanding, causal validity, and embodiment feasibility. However, these are not static achievements; they are perpetually eroding boundaries. The ‘scoped environments’ defined within the axioms are, by necessity, abstractions. Time insists on the intrusion of the unmodeled, the unforeseen.
Future iterations will inevitably confront the limitations of current semantic representations. True understanding is not the assignment of labels, but the anticipation of consequence. Furthermore, the assertion of ‘causal validity’ is itself a temporal claim. What appears causal now may be revealed as correlation with the passage of time, or simply an artifact of the observation window. Refactoring is a dialogue with the past, an attempt to anticipate the future by correcting the assumptions of the present.
The ultimate challenge is not the creation of perfect axioms, but the development of systems that age gracefully. Systems that can detect, isolate, and adapt to the inevitable decay of their foundational assumptions. The Law of Task-Achieving Body Motion provides a valuable vocabulary for this conversation, but the true work-the ongoing negotiation with time-has only just begun.
Original article: https://arxiv.org/pdf/2602.06572.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- The Division Resurgence Best Weapon Guide: Tier List, Gear Breakdown, and Farming Guide
- Kagurabachi Chapter 118 Release Date, Time & Where to Read Manga
- Last Furry: Survival redeem codes and how to use them (April 2026)
- Clash of Clans Sound of Clash Event for April 2026: Details, How to Progress, Rewards and more
- Gold Rate Forecast
- Annulus redeem codes and how to use them (April 2026)
- Silver Rate Forecast
- All Mobile Games (Android and iOS) releasing in April 2026
- Gear Defenders redeem codes and how to use them (April 2026)
- Top 5 Best New Mobile Games to play in April 2026
2026-02-10 05:08