Author: Denis Avetisyan
This review explores how biological systems inspire the design of coordinated, communicative, and scalable underwater robot teams.
A four-dimensional framework classifies bio-inspired algorithms by communication, adaptability, energy efficiency, and scalability to accelerate development in marine robotics.
Despite increasingly complex marine environments demanding sophisticated robotic solutions, realizing truly effective underwater swarm systems requires bridging fragmented research areas. This is addressed in ‘A Comprehensive Review of Bio-Inspired Approaches to Coordination, Communication, and System Architecture in Underwater Swarm Robotics’, which synthesizes bio-inspired algorithms, communication strategies, and system designs for coordinated underwater operation. The review establishes a multi-dimensional classification framework evaluating approaches based on communication dependency, environmental adaptability, energy efficiency, and scalability-critical factors for real-world deployment. How can these integrated insights accelerate the development of robust and scalable underwater swarm systems capable of tackling pressing oceanographic challenges?
The Siren Song of Swarm Robotics
Conventional single-robot systems struggle to effectively navigate and operate within the inherent complexities of underwater environments. These systems often lack the adaptability required to respond to unpredictable currents, poor visibility, and the presence of obstacles, leading to limited operational ranges and increased risks. The sheer scale of many underwater tasks – such as large-area mapping, infrastructure inspection, or environmental monitoring – further exacerbates these limitations, as a single robot would require excessive time and energy to complete them. Furthermore, the failure of a single robot in a critical mission can lead to complete mission failure, highlighting a crucial vulnerability. Consequently, researchers are increasingly exploring alternative approaches to overcome these challenges, seeking solutions that leverage the collective capabilities of multiple robotic agents.
The challenges inherent in exploring and operating within complex underwater environments-from vast ocean expanses to confined subsea infrastructure-are increasingly addressed through the innovative approach of underwater swarm robotics. Rather than relying on a single, sophisticated vehicle, this paradigm distributes tasks amongst a collective of simpler, more cost-effective robots. This distribution not only accelerates data collection and expands operational range, but also fundamentally enhances resilience; the failure of an individual robot does not compromise the mission, as others seamlessly adapt and compensate. This inherent robustness proves critical in unpredictable environments where communication can be intermittent and conditions rapidly change, offering a compelling alternative to traditional remotely operated vehicles and autonomous underwater vehicles which often represent single points of failure.
The efficacy of underwater swarm robotics fundamentally relies on the ability of individual robots to coordinate and communicate without a central authority. Robust decentralized coordination allows the swarm to adapt to unpredictable environments and task demands, distributing workload and mitigating the impact of individual robot failures. This isn’t simply about sending signals; efficient communication protocols must account for the challenges of the underwater realm – limited bandwidth, signal attenuation, and the energetic cost of transmitting data. Researchers are actively developing algorithms that prioritize essential information exchange, utilize bio-inspired communication strategies – mimicking schooling fish or insect swarms – and employ localized sensing to minimize reliance on long-range communication, ultimately fostering a resilient and highly adaptable collective behavior.
Recent advancements in underwater swarm robotics are deeply rooted in biomimicry, drawing inspiration from the collective behaviors observed in nature. A comprehensive review of current research highlights how algorithms modeled after schooling fish, flocking birds, and even the foraging strategies of ant colonies are proving remarkably effective in coordinating robot swarms. These biologically-inspired approaches address the challenges of decentralized control and communication in complex underwater environments, allowing robot groups to distribute tasks, adapt to changing conditions, and maintain operational resilience without relying on a central authority. The success of these algorithms lies in their ability to translate simple, local interactions between individual robots into complex, emergent global behaviors, offering a promising pathway towards robust and scalable underwater swarm systems.
The Acoustic Bottleneck: Underwater Communication Realities
Acoustic communication serves as the dominant method for data exchange within underwater swarm networks due to the limited range of electromagnetic waves in water. However, this approach is inherently constrained by the low speed of sound in water – approximately 1500 m/s – leading to significant propagation delays, particularly over extended ranges. Furthermore, the acoustic channel exhibits limited bandwidth, typically on the order of a few kilohertz, restricting data transmission rates. These factors combine to create a substantial bottleneck for applications requiring high data throughput or real-time responsiveness, necessitating the development of efficient communication protocols and physical-layer techniques to maximize spectral efficiency and minimize latency.
Underwater acoustic communication is susceptible to collisions due to the broadcast nature of the medium and the limited bandwidth available. Collisions occur when multiple nodes transmit simultaneously, corrupting data and necessitating retransmissions. To ensure reliable message delivery, strategies such as collision avoidance, error detection/correction codes, and acknowledgement protocols are crucial. These methods introduce redundancy to combat data loss and manage contention. Furthermore, medium access control (MAC) protocols are implemented to regulate transmission access and minimize the probability of overlapping transmissions, thereby improving overall network throughput and reliability in challenging underwater environments.
Time Division Multiple Access (TDMA) scheduling allocates specific time slots to each node within an underwater network, preventing simultaneous transmissions that cause collisions and reduce bandwidth efficiency. This structured approach divides the available communication channel into discrete intervals, with each node assigned a unique slot or series of slots for data transmission. By coordinating access in this manner, TDMA maximizes bandwidth utilization, minimizes interference, and improves the reliability of data exchange in the limited-bandwidth underwater acoustic environment. The pre-determined schedule allows receivers to anticipate transmissions, simplifying decoding and reducing energy consumption compared to contention-based methods.
The COMET and NemoSens platforms facilitate the in-situ testing and refinement of underwater acoustic communication protocols. These testbeds allow researchers to evaluate performance in realistic environments, accounting for factors such as multipath propagation and noise. Recent developments leveraging adaptive physical-layer strategies on these platforms have demonstrated energy reductions ranging from 30 to 50 percent. These strategies dynamically adjust modulation schemes, coding rates, and transmission power based on channel conditions, optimizing energy efficiency without significantly compromising data reliability or throughput.
Borrowing from Nature: Bio-Inspired Swarm Algorithms
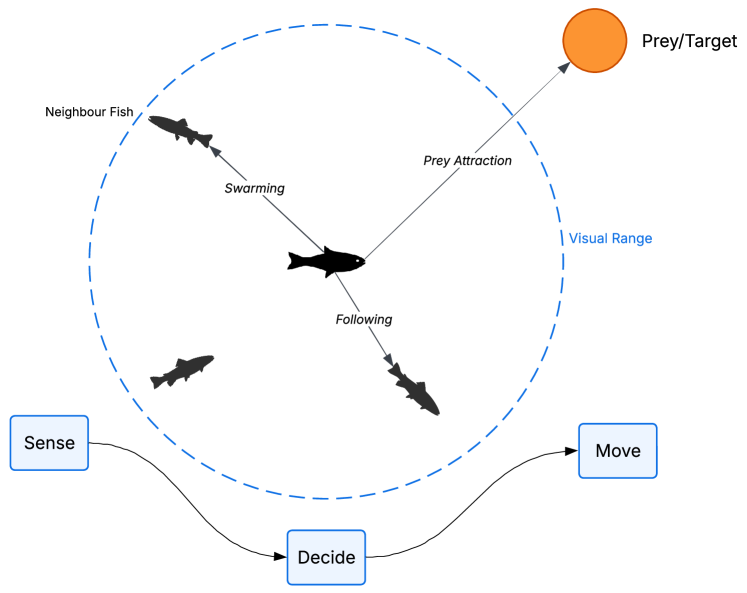
Bio-inspired algorithms such as the Artificial Fish Swarm Algorithm (AFSA), Whale Optimization Algorithm (WOA), Coral Reef Optimization (CRO), and Marine Predator Algorithm (MPA) provide decentralized coordination mechanisms by modeling the collective behaviors observed in natural swarms. These algorithms do not rely on a central controller; instead, agents within the swarm operate based on local interactions and environmental feedback. AFSA simulates fish foraging behavior, WOA models the hunting strategies of whales, CRO replicates coral reef growth, and MPA mimics the predatory behaviors of marine animals. This distributed approach enhances robustness and scalability, enabling effective problem-solving in dynamic and complex environments where centralized control may be impractical or infeasible.
Bio-inspired algorithms, utilized in swarm intelligence, derive their functionality from observed behaviors in natural systems. These algorithms model collective problem-solving strategies found in species such as fish schools, whale pods, and coral reefs. This biomimicry allows for decentralized control, where individual agents within the swarm operate based on local interactions and limited global knowledge. The resulting emergent behavior facilitates efficient search of complex solution spaces, optimization of multi-variable functions, and collective decision-making without centralized authority, offering robustness and scalability for various computational tasks.
Bio-inspired swarm intelligence algorithms demonstrate varied capabilities suited to different optimization challenges. The Whale Optimization Algorithm (WOA) excels in global search due to its mechanisms mimicking whale foraging strategies, effectively exploring a large solution space. Conversely, the Artificial Fish Swarm Algorithm (AFSA) prioritizes adaptive behavior; individual ‘fish’ dynamically adjust their movement based on food concentration, enabling efficient local exploration and exploitation of promising areas. Coral Reef Optimization (CRO) focuses on reef growth and competition, suitable for multimodal optimization problems, while the Marine Predator Algorithm (MPA) models predator-prey interactions, proving effective in scenarios requiring dynamic tracking and adaptation. These differing strengths allow practitioners to select the most appropriate algorithm based on the specific characteristics of the optimization problem at hand.
Bio-inspired swarm algorithms utilize acoustic communication to facilitate information exchange and coordinated movement within a decentralized system. This communication enables agents to share data regarding resource availability, potential threats, and optimal paths, leading to energy-aware path planning. Simulations and preliminary field tests indicate that the implementation of these algorithms, specifically focusing on optimized movement strategies informed by acoustic data, can result in a potential 20-30% reduction in propulsion costs compared to traditional, non-coordinated movement patterns. The efficiency gains stem from minimizing redundant travel, avoiding obstacles, and exploiting favorable environmental conditions communicated through the acoustic network.
The Long Haul: Scaling and Sustaining Underwater Swarms
The practical implementation of underwater swarm robotics hinges significantly on scalability – the ability of a system to maintain effectiveness as the number of autonomous agents increases. While small-scale demonstrations have proven the concept, real-world scenarios – such as environmental monitoring across vast ocean areas, large-scale infrastructure inspection, or coordinated search and rescue operations – demand swarms composed of dozens, if not hundreds, of robots. This presents substantial challenges, as communication bandwidth, computational resources, and the complexity of coordinating movements all increase non-linearly with swarm size. Successfully addressing these limitations requires innovative algorithmic design, efficient communication protocols that minimize energy consumption, and robust methods for handling agent failures – ultimately determining whether underwater swarms can transition from promising research prototypes to dependable tools for addressing critical challenges.
Successfully scaling underwater swarms beyond a handful of robots necessitates algorithms resilient to the complexities of increasing agent numbers. Simple, centralized control schemes quickly become bottlenecks, demanding a shift towards decentralized approaches where each robot operates with limited global knowledge. Robustness isn’t solely algorithmic; efficient communication protocols are equally vital. These protocols must minimize bandwidth consumption, account for the limitations of underwater acoustic communication – including signal attenuation and multipath interference – and prioritize critical information dissemination. Recent advancements focus on bio-inspired communication strategies, such as quorum sensing, and adaptive communication ranges, allowing the swarm to dynamically adjust its network topology and maintain performance even as the number of participating agents grows substantially, ultimately enabling complex cooperative behaviors at scale.
Prolonged underwater deployments necessitate a critical focus on energy efficiency within swarm robotic systems. Operating autonomously for extended periods demands minimization of power consumption across all agents, influencing both algorithmic design and hardware selection. Researchers are actively exploring strategies like dynamic task allocation, optimized communication schedules, and the harvesting of ambient energy – including vibrations and temperature gradients – to replenish power reserves. Furthermore, advancements in low-power microprocessors, efficient thrusters, and streamlined hydrodynamic designs are crucial for reducing the energetic footprint of individual robots, thereby maximizing mission duration and ensuring the long-term sustainability of underwater swarm operations. This pursuit of energy efficiency isn’t simply about extending runtime; it’s fundamental to enabling persistent environmental monitoring, large-scale data collection, and comprehensive underwater infrastructure inspection.
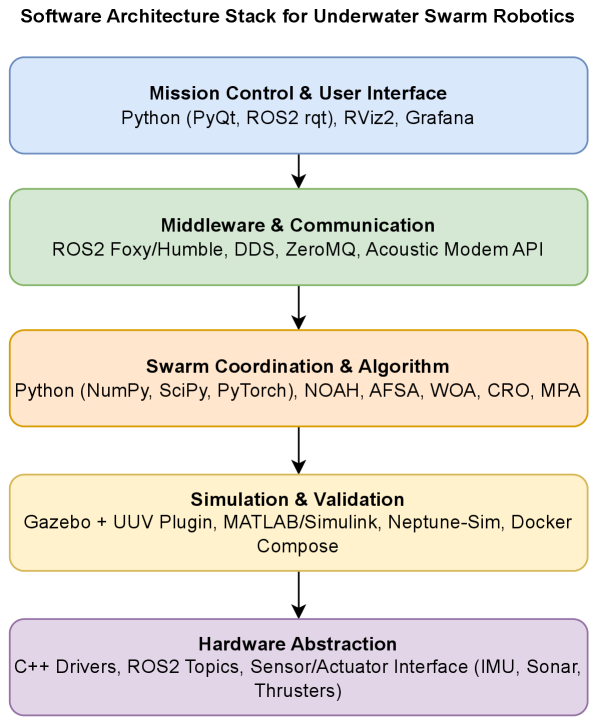
The future of underwater swarm robotics hinges on a synergistic approach to algorithmic innovation and platform engineering, as detailed in a recent comprehensive review. This work underscores that simply increasing the number of robotic agents is insufficient; true potential is realized when bio-inspired algorithms – those mimicking the collective behavior of natural swarms like schools of fish or insect colonies – are paired with advanced robotic designs. The review highlights critical performance tradeoffs, such as the balance between communication range, computational complexity, maneuverability, and energy consumption, and proposes a novel four-dimensional classification framework to better categorize and compare different swarm approaches. By systematically addressing these challenges and leveraging insights from biological systems, researchers are poised to create underwater swarms capable of tackling complex tasks like environmental monitoring, infrastructure inspection, and large-scale oceanographic surveys with unprecedented efficiency and adaptability.
The pursuit of elegant coordination in underwater swarm robotics, as detailed in this review, often feels like chasing a mirage. Researchers meticulously craft bio-inspired algorithms, striving for scalability and adaptability, yet production environments-the murky depths-inevitably introduce unforeseen complexities. Donald Knuth observed, “Premature optimization is the root of all evil,” and it rings particularly true here. This review’s four-dimensional classification – communication dependency, adaptability, energy efficiency, and scalability – is a commendable attempt to anticipate those inevitable breaks, but one suspects even the most robust system will eventually reveal its limitations. Better one well-tested, slightly inelegant approach than a hundred theoretically perfect, yet brittle, micro-algorithms.
What’s Next?
The pursuit of bio-inspired coordination in underwater swarms inevitably leads to increasingly elaborate architectures. This review’s classification, while a useful exercise, merely formalizes the trade-offs already understood by anyone who has attempted deployment. Greater communication dependency promises elegant solutions, but also exponentially increases energy demands and the likelihood of cascading failures. Adaptability, so alluring in theory, consistently proves difficult to implement without introducing unacceptable latency – a ‘perfect’ algorithm is, after all, one that hasn’t encountered a truly unexpected edge case.
The focus on scalability, while strategically important, risks becoming another layer of abstraction masking fundamental limitations. Larger swarms don’t solve problems; they simply distribute them. The real bottleneck isn’t algorithmic complexity, but the practical realities of underwater communication – bandwidth, range, and the ever-present interference. More sophisticated algorithms are, at best, expensive ways to complicate everything.
Future work will undoubtedly refine these algorithms, but the truly significant advances will likely come from improvements in power sources, materials science, and the acceptance that, ultimately, any autonomous system will spend most of its time working around its own imperfections. If code looks perfect, no one has deployed it yet. The challenge isn’t building a beautiful swarm; it’s building one that reliably executes its task, even when everything goes wrong.
Original article: https://arxiv.org/pdf/2601.12244.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Invincible Season 4 Episode 4 Release Date, Time, Where to Watch
- Physics Proved by AI: A New Era for Automated Reasoning
- Gold Rate Forecast
- American Idol vet Caleb Flynn in solitary confinement after being charged for allegedly murdering wife
- Magicmon: World redeem codes and how to use them (March 2026)
- “Wild, brilliant, emotional”: 10 best dynasty drama series to watch on BBC, ITV, Netflix and more
- Total Football free codes and how to redeem them (March 2026)
- Goddess of Victory: NIKKE 2×2 LOVE Mini Game: How to Play, Rewards, and other details
- Seeing in the Dark: Event Cameras Guide Robots Through Low-Light Spaces
- Simulating Humans to Build Better Robots
2026-01-22 01:20