Author: Denis Avetisyan
A novel methodology streamlines the development of robotic systems by translating high-level objectives into executable code with formal guarantees.
![Ontological concepts, while seemingly disparate across perspectives, ultimately converge upon a shared foundation of formalized relationships, demonstrable through the consistent application of [latex] \lambda x . \phi(x) [/latex] to define object properties and their interactions within a logically consistent framework.](https://arxiv.org/html/2602.05456v1/ontology_all_perspectives_new.png)
This paper introduces RS² (RS(TM)2), a methodology combining ontological modeling, Petri nets, and ROS 2 for robust robotic specification synthesis and verification.
Bridging the gap between high-level mission objectives and robust, executable robotic systems remains a significant challenge in complex automation. This paper introduces a novel methodology, ‘Ontology-Driven Robotic Specification Synthesis’, that leverages ontological modeling and formal verification with stochastic Petri nets to systematically translate abstract goals into deployable robotic behaviors. The resulting RS² (RS(TM)2) methodology enables Monte Carlo simulations at multiple levels of abstraction, facilitating architectural trade studies and resource allocation under uncertainty. Could this approach pave the way for fully autonomous specification synthesis and the development of truly adaptive, decentralized multi-robot systems, such as those envisioned for future missions like NASA’s CADRE?
Formalizing Robotic Intent: Bridging the Specification Gap
Robotic system development is frequently hampered by a substantial disconnect between intended goals and final execution, a phenomenon known as the specification gap. This gap isn’t merely a matter of complexity; it represents a fundamental challenge in translating abstract, high-level objectives – such as ‘navigate to the charging station’ or ‘grasp the red block’ – into the precise, low-level instructions a robot can understand. Consequently, implementation errors are common, requiring extensive debugging and rework, and inevitably leading to project delays and increased costs. The issue stems from the inherent ambiguity in natural language descriptions of tasks, combined with the difficulty of anticipating every possible scenario the robot might encounter, creating a cascade of unforeseen problems during the integration and testing phases. Addressing this gap is crucial for building reliable and efficient robotic systems capable of operating autonomously in complex environments.
The translation of ambitious robotic goals into functional reality is often hampered by a considerable chasm between intended purpose and actual implementation. This difficulty stems from the inherent complexity of decomposing abstract, high-level objectives – such as “navigate to the kitchen” or “retrieve the red block” – into the thousands of minute, precise instructions a robot’s control systems require. Each conceptual step necessitates numerous considerations – sensor interpretation, motor control, error handling, and environmental adaptation – which, when codified into executable code, can introduce unforeseen complications and deviations from the initial design. Consequently, a seemingly straightforward task can demand an unexpectedly intricate and error-prone coding process, frequently leading to delays, unexpected behaviors, and ultimately, a disconnect between the desired functionality and the robot’s performance.
Addressing the pervasive specification gap in robotics demands a systematic methodology focused on proactive correctness. Current practices often rely on iterative testing and debugging, a reactive approach prone to overlooking subtle errors and leading to costly rework. A robust solution involves formalizing high-level objectives into verifiable specifications – essentially, creating a mathematical ‘contract’ for the robot’s behavior. This allows for automated verification, ensuring the implemented code demonstrably meets the intended goals before deployment. Such a methodology not only minimizes implementation errors but also facilitates greater confidence in system reliability, particularly crucial for safety-critical applications like autonomous navigation or surgical robotics. The emphasis shifts from detecting failures to preventing them, fostering a more efficient and trustworthy development process.
RS(TM)2: A Formalized Ontology for Robotic Systems
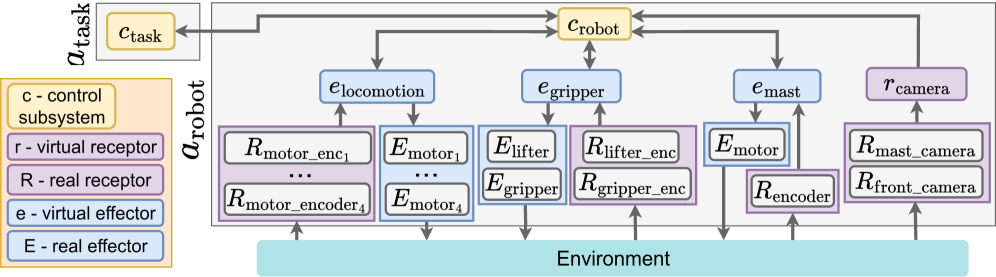
RS(TM)2 utilizes a formalized methodology based on ontological concepts – specifically, the classification of system components into Entities, Tasks, and Environments – to establish a consistent semantic framework for robotic system design. Entities represent the physical and informational components of the system, Tasks define the actions the system performs, and Environments characterize the context in which these actions occur. By explicitly defining these core ontological categories and their relationships, RS(TM)2 enables a shared understanding of system requirements and facilitates consistent modeling across different abstraction levels. This ontological grounding is critical for ensuring that all stakeholders – including designers, developers, and verifiers – operate with a common and unambiguous interpretation of the robotic system’s intended behavior and operational context.
The Robotic System Hierarchical PN Metamodel is a parameterized Petri net utilized to model robotic systems across varying levels of abstraction. This metamodel facilitates a hierarchical representation, allowing designers to decompose complex systems into manageable, interconnected components. Parameterization within the Petri net enables the specification of system behaviors and characteristics through variables, promoting reusability and adaptability. The hierarchical structure supports both top-down refinement of system requirements and bottom-up composition of individual components, enabling comprehensive system modeling and analysis. Different abstraction layers within the hierarchy allow for focus on specific aspects of the system, such as high-level mission planning or low-level actuator control, while maintaining consistency across the entire model.
The RS(TM)2 methodology utilizes formal methods – mathematically-based techniques – to create system specifications that are demonstrably correct and free from semantic ambiguity. This involves defining system behavior using a precise, unambiguous language based on the Robotic System Hierarchical PN Metamodel. Formal verification techniques, including model checking and theorem proving, are then applied to these specifications to mathematically prove the absence of errors and to ensure that the system will behave as intended. This contrasts with traditional, informal specification methods which rely on natural language and diagrams, which are inherently open to interpretation and prone to inconsistencies, and can lead to costly errors during implementation and testing.
![The [latex]RS(TM)^{2}[/latex] procedure leverages fundamental Recursive State Space Model (RSSM) concepts-both structural and activity-based-to achieve its functionality.](https://arxiv.org/html/2602.05456v1/rstm_rssm.png)
From Formal Models to Executable Robotic Systems
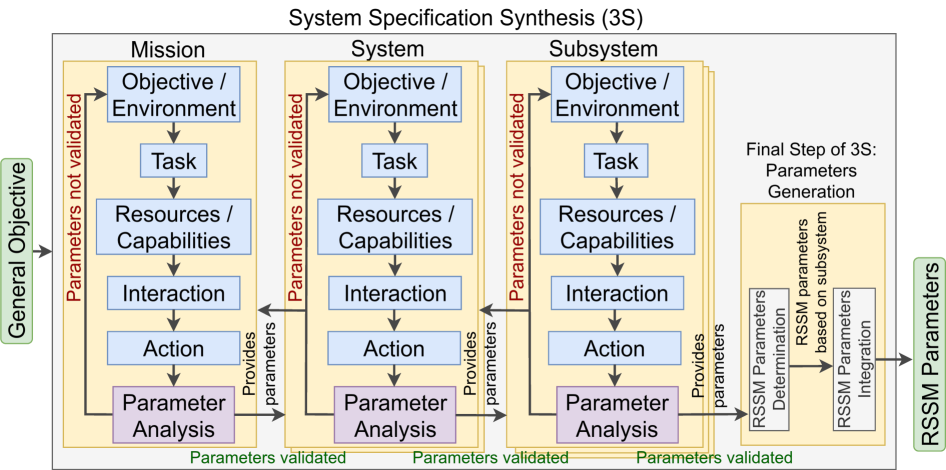
System Specification Synthesis within the RS(TM)2 framework utilizes Stochastic Timed Petri Nets (STPNs) as the foundational method for deriving quantifiable system model parameters. These STPNs allow for the explicit modeling of temporal behavior, inherent uncertainties within the system, and limitations imposed by available resources. The use of STPNs facilitates the representation of system components, their interactions, and the associated timing characteristics, enabling the quantification of parameters such as task execution times, communication delays, and resource consumption rates. By incorporating probabilistic timing and resource modeling, the synthesis process generates parameters that reflect not just nominal behavior, but also the range of possible system states and their associated probabilities, which is crucial for robust system design and verification.
RSSL2 Specification Generation processes the system model parameters – derived from Stochastic Timed Petri Nets – into a formal specification suitable for implementation. This transformation involves defining system behavior, interfaces, and constraints in a machine-readable format. The generated specification explicitly details component interactions and timing requirements, enabling automated code synthesis or verification. Specifically, the output conforms to requirements necessary for direct translation into a Robotic Operating System 2 (ROS 2) implementation, facilitating rapid prototyping and deployment of the system model as executable code.
A tower-building simulation was utilized to validate the methodology, resulting in an 11-second task completion time. This performance represents a reduction achieved by increasing the operational frequency of constituent subsystems from 10 Hz to 50 Hz. The simulation demonstrates the direct correlation between subsystem frequency and overall task completion time within the framework of the synthesized specifications and generated code, providing quantifiable evidence of the methodology’s effectiveness in optimizing system performance.
This methodology builds upon established Model-Based System Engineering (MBSE) practices by incorporating a defined process specifically for generating executable code utilizing the Robot Operating System 2 (ROS 2) framework. Unlike general MBSE approaches, this process details the transformation of system models – derived using Stochastic Timed Petri Nets – into formal specifications and subsequently into ROS 2-compatible code. This dedicated pathway enables automated code generation, reducing manual implementation efforts and facilitating rapid prototyping and deployment of complex systems within a ROS 2 environment. The resulting implementation allows for verification and validation of system behavior against the original model, ensuring traceability and reducing the risk of errors.
Enhancing Robotic Resilience Through Proactive Safety Measures
RS(TM)2 distinguishes itself by proactively integrating the concept of Negative Affordances into system design. These aren’t simply potential errors, but deliberately highlighted cues indicating where a system could fail or operate unsafely. By explicitly signaling these risk points – such as a component exceeding its thermal limits, or a potential collision course – the methodology encourages engineers to address vulnerabilities early in the development process. This approach moves beyond reactive error correction, fostering a system architecture where potential failures are anticipated and mitigated, thereby increasing overall robustness and operational safety. The intentional design of these ‘negative signals’ allows for focused testing and validation, ensuring a more resilient and predictable system performance.
A proactive approach to system safety is central to the methodology, focusing on the identification and mitigation of potential failure points during the initial specification phase. This involves recognizing ‘Negative Affordances’ – design elements that suggest incorrect or risky actions – and actively addressing them before implementation. By systematically analyzing how a system could fail, rather than reacting to failures after they occur, the methodology builds inherent robustness. This preemptive strategy minimizes the likelihood of errors, enhances system reliability, and ultimately improves overall safety by ensuring that the system guides users and components towards correct and secure operation from the outset.
Evaluations of the RS(TM)2 methodology reveal a substantial performance increase when robots collaborate. Initial testing with a single robotic unit demonstrated a 72% success rate in completing designated tasks. However, implementation of the methodology with a dual-robot system yielded a significantly improved 93% success rate. This marked enhancement underscores the system’s capacity to leverage collaborative robotics, suggesting that the methodology not only bolsters individual robotic performance but also unlocks synergistic benefits through coordinated action. The data highlights the potential for increased efficiency and reliability in complex operations when multiple robotic units operate under the guidance of this framework.
The research methodology prioritizes seamless integration and regulatory adherence through strict compliance with established industry standards, specifically IEEE 1872.1-2024 and IEEE 1872.2-2021. This commitment isn’t merely about ticking boxes; it facilitates interoperability, allowing systems developed under this methodology to communicate and function cohesively with existing infrastructure and other compliant technologies. By aligning with these well-defined standards, the approach minimizes integration challenges, reduces the risk of unforeseen compatibility issues, and provides a clear pathway for systems to meet necessary safety and performance certifications, ultimately accelerating deployment and fostering wider adoption within complex operational environments.
![Analysis of a robotic system's capabilities, derived from 1000 trials with a device reliability of approximately [latex]\mathcal{N}(0.9,0.05)[/latex], reveals strong correlations between capabilities like manipulation, lifting, and detection, and demonstrates that both subsystem and system redundancy (r=0.95) contribute to overall mission capability availability.](https://arxiv.org/html/2602.05456v1/probability_vs_reliability_fixed.png)
The pursuit of robotic system architecture, as detailed in this work, echoes a fundamental mathematical principle. The methodology, RS² (RS(TM)2), strives for a provably correct transition from ontological modeling to executable code, mirroring the desire for elegant, irrefutable solutions. As G.H. Hardy observed, “Mathematics may be considered with precision, but how it is applied is often a matter of art.” This paper demonstrates that robotic specification synthesis, while rooted in formal verification and Petri nets, requires a degree of artistry to effectively bridge the gap between abstract objectives and concrete implementation. Let N approach infinity – what remains invariant is the need for rigorous, mathematically grounded approaches to ensure the reliability and correctness of increasingly complex robotic systems.
Beyond Specification: The Path Forward
The presented methodology, while a demonstrable step towards rectifying the perennial specification gap, merely shifts the locus of uncertainty. Formal verification, even when grounded in ontological precision, cannot conjure correctness from ill-defined objectives. The core limitation remains the translation of ‘intent’ into axioms amenable to Petri net analysis. Future work must therefore prioritize not simply how to verify, but what constitutes a verifiable objective. A robot executing a formally correct, yet ultimately meaningless, sequence of actions offers little practical advancement.
Furthermore, the current reliance on human-authored ontologies introduces a fragility inherent in all symbolic representations. The promise of a truly autonomous system demands a mechanism for self-evolving specifications – a robotic epistemology, if one will. Investigating the intersection of automated knowledge acquisition and formal methods represents a significant, though daunting, challenge. The system’s architecture should accommodate self-correction, based on demonstrable inconsistencies between modeled behavior and observed reality.
Ultimately, the field must confront a philosophical impasse: can a machine, operating solely on logical deduction, truly understand the nuances of the physical world? The pursuit of ‘correctness’ should not eclipse the acknowledgement that robotics, at its heart, is an exercise in controlled approximation. The elegance of a provable solution is, admittedly, satisfying. However, practical utility demands a pragmatic acceptance of inherent imprecision.
Original article: https://arxiv.org/pdf/2602.05456.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- The Division Resurgence Best Weapon Guide: Tier List, Gear Breakdown, and Farming Guide
- Kagurabachi Chapter 118 Release Date, Time & Where to Read Manga
- Last Furry: Survival redeem codes and how to use them (April 2026)
- Clash of Clans Sound of Clash Event for April 2026: Details, How to Progress, Rewards and more
- Guild of Monster Girls redeem codes and how to use them (April 2026)
- GearPaw Defenders redeem codes and how to use them (April 2026)
- After THAT A Woman of Substance cliffhanger, here’s what will happen in a second season
- All Mobile Games (Android and iOS) releasing in April 2026
- Wuthering Waves Hiyuki Build Guide: Why should you pull, pre-farm, best build, and more
- Limbus Company 2026 Roadmap Revealed
2026-02-08 00:39