Author: Denis Avetisyan
Researchers are exploring how brainwave data can drive the movements of soft robots, opening new avenues for emotionally responsive art and non-verbal communication.
This review examines the integration of electroencephalography (EEG)-based emotion recognition with soft robotics to create dynamic art installations and enhance human-robot interaction.
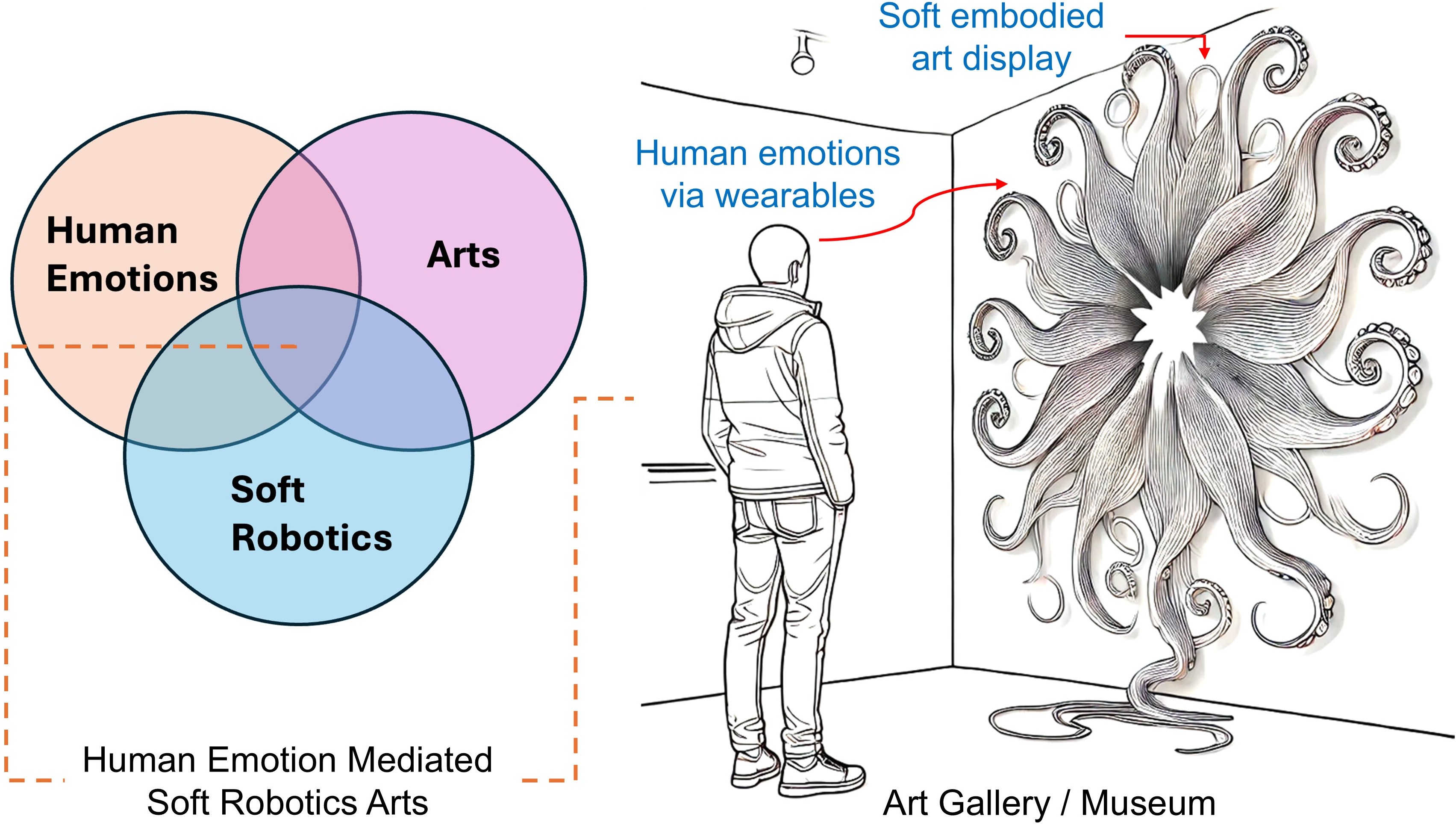
Traditional artistic expression often lacks a direct conduit for embodying and responding to internal human states. This is addressed in ‘Human Emotion-Mediated Soft Robotic Arts: Exploring the Intersection of Human Emotions, Soft Robotics and Arts’, which investigates the integration of electroencephalography (EEG)-derived emotional data with the unique capabilities of soft robotics. The study demonstrates how dynamically controlled, soft robotic embodiments can reflect nuanced emotional states measured via alpha wave brain signals, creating a novel medium for interactive art. Could this approach unlock new avenues for non-verbal communication and emotionally resonant human-robot interactions beyond artistic expression?
The Echo of Feeling: Bridging Inner and Outer Worlds
Historically, the creation of art has largely been a process of externalization, where internal thoughts and feelings are translated into a tangible form, but often without a direct, reciprocal link between the two. This conventional approach can result in a disconnect, where the finished artwork, while potentially evocative, doesn’t actively respond to the creator’s – or even the viewer’s – current emotional state. The nuances of human feeling, constantly shifting and evolving, are frequently captured as a static representation, losing the dynamic interplay between inner experience and outward expression. This limitation motivates exploration into artistic mediums capable of mirroring and reacting to internal human states, aiming to create a more intimate and fluid connection between the artist, the artwork, and the audience.
Human Emotion-Mediated Soft Robotic Arts represent a burgeoning field aiming to dissolve the traditional barrier between inner experience and outward artistic form. This innovative approach utilizes the confluence of neurotechnology and malleable robotics to translate physiological signals – indicative of emotional states – into dynamic, physical expressions. Rather than relying on conscious artistic intent, the system directly channels a viewer’s emotional landscape – detected through brain-computer interfaces and other biosensors – into the movements and configurations of soft robotic structures. The resulting artwork isn’t created so much as manifested from within, offering a uniquely responsive and deeply personal aesthetic experience where the artwork itself becomes a living echo of the viewer’s feelings. This fosters an intimate dialogue between observer and creation, potentially unlocking new avenues for emotional understanding and self-expression.
The emergence of Human Emotion-Mediated Soft Robotic Arts hinges on a confluence of rapidly developing technologies – specifically, increasingly sophisticated brain-computer interfaces and the growing field of soft robotics. These systems strive to translate neurological signals, reflecting a viewer’s emotional state – be it joy, sadness, or tranquility – into physical expressions manifested by the robotic artwork itself. Unlike traditional art forms static in their presentation, this medium proposes a dynamic interplay; the artwork doesn’t simply represent emotion, but actively responds to it, shifting shape, color, or movement in real-time as a direct consequence of the observer’s internal experience. This creates a feedback loop, potentially amplifying emotional resonance and fostering a uniquely intimate connection between the artwork and the individual, effectively turning passive observation into an active, emotional dialogue.
Decoding the Brain’s Emotional Signature
Electroencephalography (EEG) was utilized as a non-invasive technique to measure the electrical activity generated by neuronal populations within the brain. This method involves placing electrodes on the scalp to detect voltage fluctuations resulting from ionic current flows within the neurons. By recording these fluctuations, researchers aimed to identify specific neural correlates – patterns of brain activity – associated with various emotional states. EEG provides millisecond-level temporal resolution, allowing for the observation of dynamic changes in brain activity as emotions are experienced or processed, without requiring surgical intervention or exposure to ionizing radiation. The resulting data represents the collective electrical activity of large populations of neurons, offering a global, albeit spatially limited, view of brain function related to emotional processing.
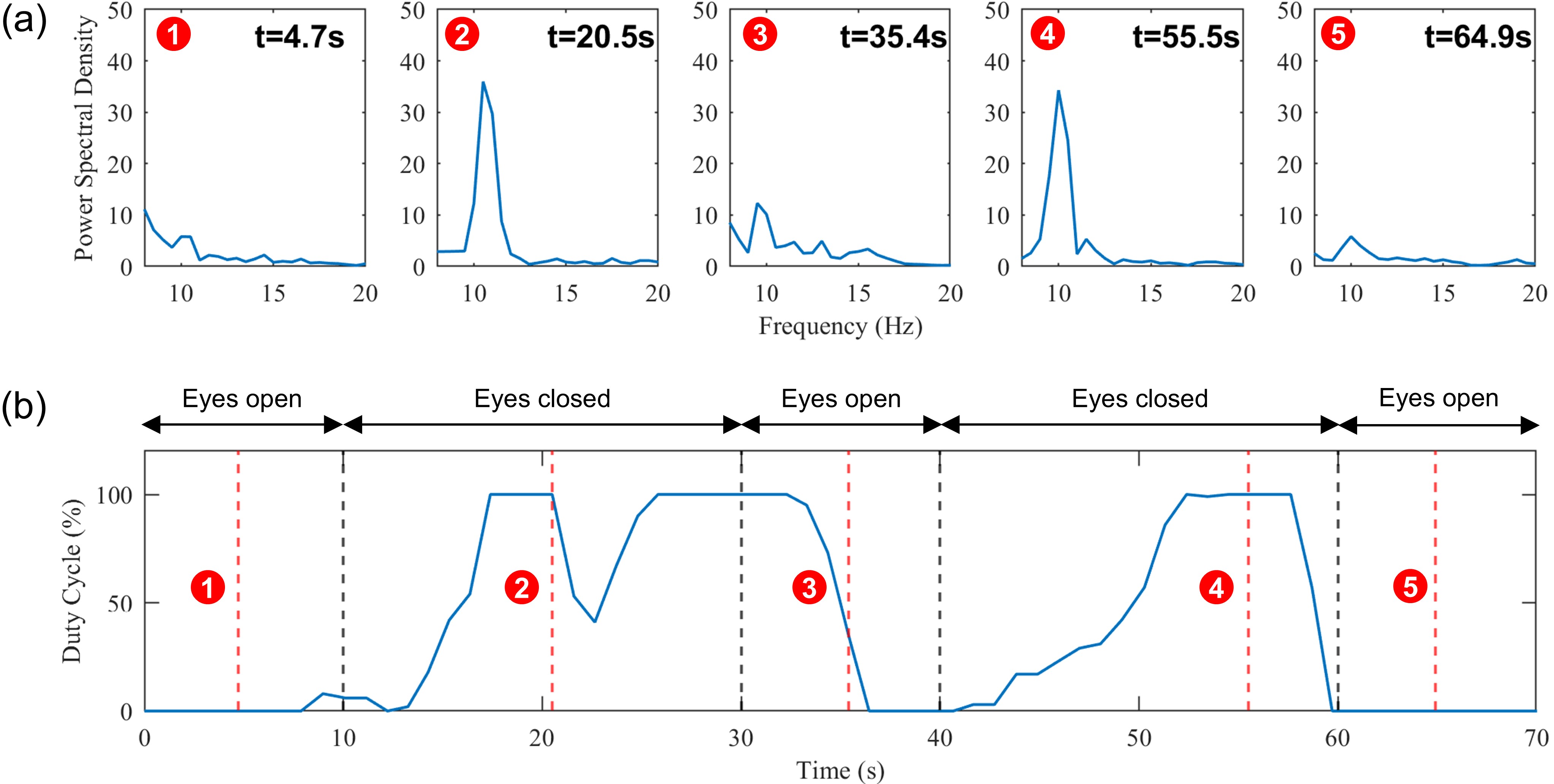
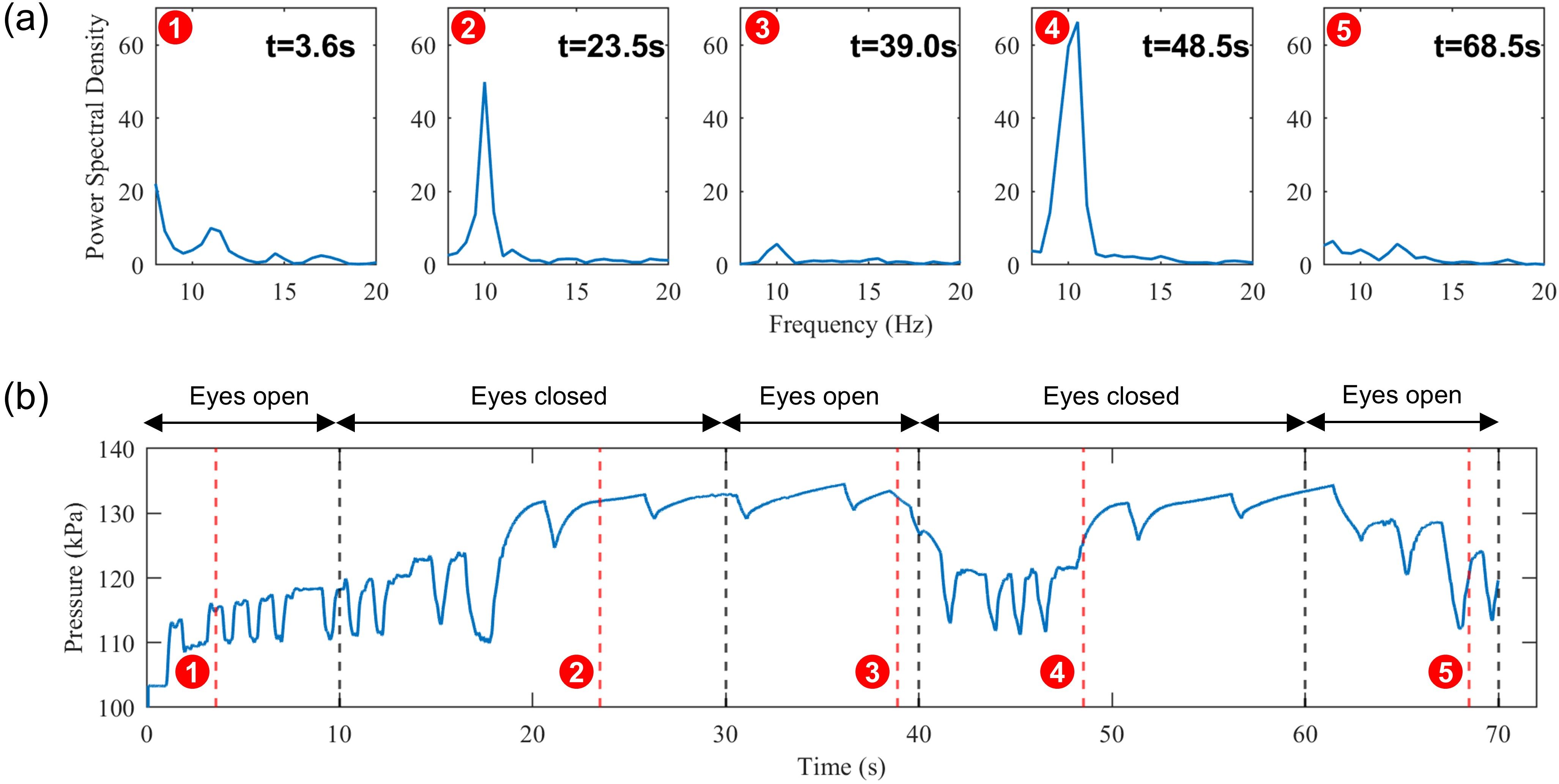
Alpha waves, brainwave frequencies ranging from 8 to 13 Hz, were utilized as primary indicators of internal emotional states due to their established association with both relaxation and emotional processing. These frequencies represent a specific band within the broader spectrum of brainwave activity and are readily measurable using non-invasive techniques like Electroencephalography (EEG). Variations in the amplitude and synchronization of alpha waves are considered to reflect changes in attentional state and emotional valence. The focus on this frequency band allows for the differentiation of emotional responses based on quantifiable changes in cortical electrical activity, providing a measurable neural correlate for subjective emotional experience.
Electroencephalography (EEG) data was digitized at a sampling rate of 250 Hz. To analyze the frequency components of the recorded signals, a Fast Fourier Transform (FFT) was applied, converting the time-series data into the frequency domain. This allowed for the quantification of Alpha Wave activity, specifically by calculating the Power Spectral Density (PSD). PSD values were determined using a fixed-length rolling window of 500 data points, advanced in steps to achieve 1/2 overlap between successive windows; this approach provided a time-resolved estimate of Alpha Wave power and enhanced the sensitivity of the analysis to transient changes in brain activity.
From Neural Signal to Robotic Expression
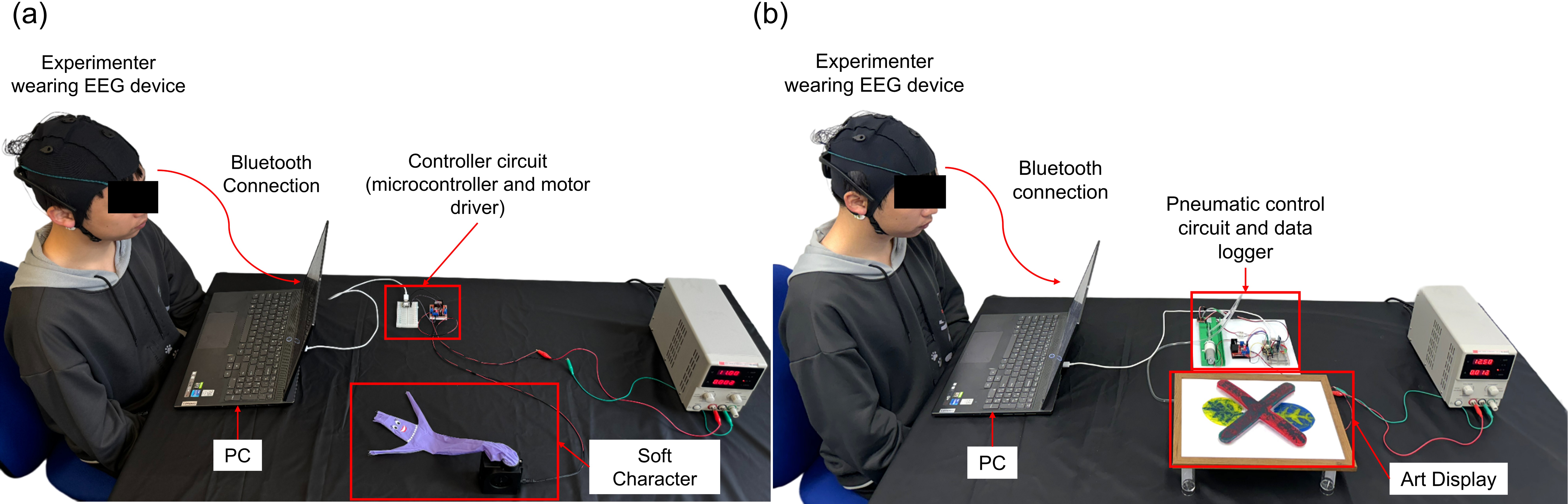
The Brain-Computer Interface (BCI) functions as the primary conduit between neurological activity and robotic actuation. Specifically, electroencephalography (EEG) data is acquired non-invasively from the user, then undergoes signal processing to isolate and quantify relevant brainwave patterns. This processed data is then converted into control signals, effectively translating neural activity into commands understood by the robotic system. These commands govern the behavior of the soft robotic displays, allowing for real-time expression based on the user’s cognitive state as detected by the BCI. The system is designed for direct neural control, bypassing conventional input methods and enabling an intuitive interface between the user and the art installation.
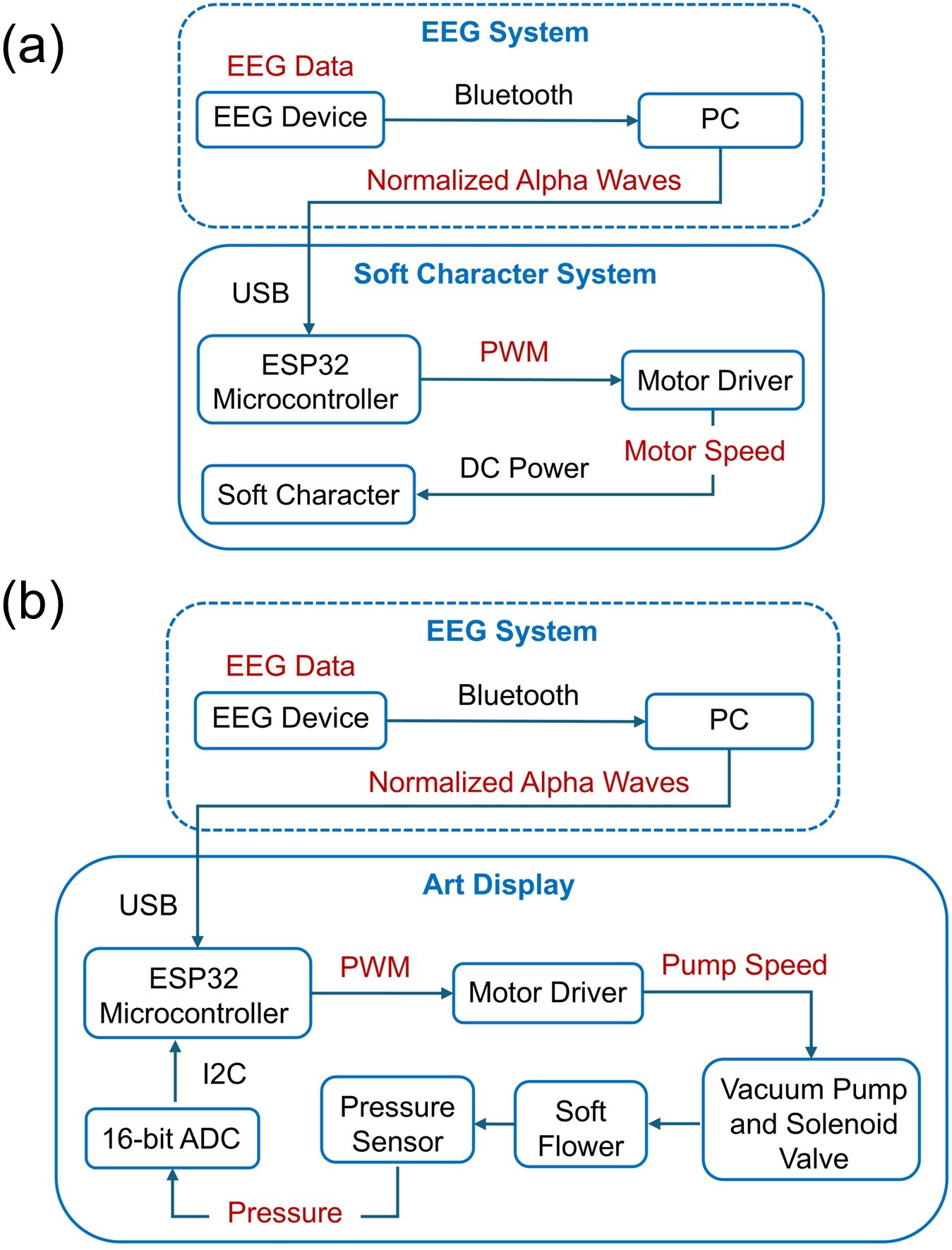
The system utilizes two distinct robotic forms for expressive output: a ‘Soft Character’ and a ‘Soft Flower’. The Soft Character is engineered for dynamic physical movements, allowing it to convey emotion through motion. Complementing this is the Soft Flower, a pneumatically-actuated structure that visually represents emotional states by varying its inflation and deflation. This is achieved through controlled air pressure, allowing for changes in shape and size that are directly correlated to the detected emotional data from the user’s brainwaves.
Actuator control is achieved through a microcontroller employing Pulse Width Modulation (PWM) to translate electroencephalography (EEG) data, specifically alpha wave activity, into physical movements. The alpha wave signal is scaled by a factor of 2.55 to drive the ‘Soft Character’ actuators, enabling dynamic motion. For the ‘Soft Flower’, the alpha wave activity is scaled to 0.15, regulating internal pressure within a range of 120-135 kPa. This precise pressure control allows for visual representation of emotional states through inflation and deflation of the flower structure.
Precision Control: Articulating Emotional Resonance
The Soft Flower’s dynamic and lifelike movements are achieved through a precisely engineered pneumatic system governed by a Proportional-Integral-Derivative (PID) control loop. This feedback mechanism continuously monitors the flower’s inflation and deflation, making real-time adjustments to the air pressure delivered by the actuator. By carefully balancing proportional, integral, and derivative terms, the system minimizes overshoot and oscillation, resulting in smooth, natural-looking animations. This high level of accuracy isn’t merely technical; it’s fundamental to the artwork’s expressive capacity, allowing for subtle shifts in form that contribute to a compelling and emotionally resonant visual experience. The PID loop effectively transforms the robotic flower from a static sculpture into a dynamic and responsive art piece.
The Soft Flower achieves its dynamic behavior through a continuous feedback loop that precisely governs its inflation and deflation. This mechanism doesn’t simply execute pre-programmed movements; it actively monitors the flower’s current state – its degree of openness, the pressure within its petals – and uses this information to refine the signals sent to the actuators controlling airflow. Crucially, this responsiveness extends to external stimuli; the system scales the inflation time by a factor of 0.02, directly influenced by detected Alpha Wave activity. This integration of biofeedback translates into a visually compelling display where the flower’s movements are not arbitrary, but a nuanced reflection of external emotional cues, creating an engaging and subtly expressive artistic experience.
The precision achieved in regulating the Soft Flower’s pneumatic movements extends beyond mere aesthetic enhancement, suggesting a pathway towards robotic art capable of genuine emotional connection. By dynamically linking the flower’s inflation to biometric data – specifically, alpha wave activity – the system moves beyond pre-programmed displays to exhibit a form of responsive behavior. This creates an opportunity for viewers to perceive the artwork not as a static object, but as an entity mirroring, or at least acknowledging, their own internal state, fostering a deeper, more personal engagement. Such a demonstration validates the potential for emotionally responsive robots to move beyond functional tasks and enter the realm of artistic expression, prompting consideration of how machines can contribute to, and participate in, human emotional experiences.
The pursuit of responsive art, as detailed in this exploration of emotion-mediated soft robotics, often leads to unnecessarily complex systems. It’s a common failing; engineers, striving for nuance, build layers upon layers when a simpler approach would suffice. As Donald Davies observed, “It is astonishing how much information is lost in translation.” The article demonstrates a fascinating attempt to bridge the gap between human emotional states – measured through the intricacies of EEG and alpha wave detection – and the physical expression of soft robotic forms. Yet, the true elegance lies not in the sophistication of the brain-computer interface, but in the clarity with which the robot responds – or, crucially, doesn’t – to those signals. A directness of expression, unburdened by superfluous mechanics, would be a far more powerful artistic statement.
Further Refinements
The pursuit of emotion-driven robotics yields, predictably, a surplus of interpretation. The signal – alpha waves, in this instance – is not the emotion itself, but a correlated fluctuation. Reducing affect to measurable parameters invites a kind of elegant impoverishment. Future work must confront this directly: not to solve the problem of subjective experience, but to acknowledge its irreducible nature and build systems that operate with ambiguity, rather than attempting to eliminate it.
Current limitations reside not in the mechanics of detection, but in the poverty of response. Dynamically controlled embodiments, while promising, remain largely demonstrative. A worthwhile progression involves exploring feedback loops: systems where robotic action meaningfully alters the emotional state being measured, creating genuine, if limited, dialog. The artistic merit, of course, is secondary to the epistemic challenge.
The ultimate test will not be whether a robot can express emotion, but whether it can elicit a genuine, uncalculated response in the observer. This requires moving beyond novelty, beyond the spectacle of technological prowess, toward a subtle, almost imperceptible form of interaction. Simplicity, again, may be the key.
Original article: https://arxiv.org/pdf/2602.13163.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Invincible Season 4 Episode 4 Release Date, Time, Where to Watch
- How Martin Clunes has been supported by TV power player wife Philippa Braithwaite and their anti-nepo baby daughter after escaping a ‘rotten marriage’
- Gold Rate Forecast
- eFootball 2026 is bringing the v5.3.1 update: What to expect and what’s coming
- CookieRun: OvenSmash coupon codes and how to use them (March 2026)
- American Idol vet Caleb Flynn in solitary confinement after being charged for allegedly murdering wife
- Invincible Creator on Why More Spin-offs Haven’t Happened Yet
- Clash Royale Balance Changes March 2026 — All Buffs, Nerfs & Reworks
- Roco Kingdom: World China beta turns chaotic for unexpected semi-nudity as players run around undressed
- Nicole Kidman and Jamie Lee Curtis elevate new crime drama Scarpetta, which is streaming now
2026-02-16 07:25