Author: Denis Avetisyan
Researchers have developed a flexible, spring-based robot modeled after caterpillar locomotion for effective exploration of confined environments.

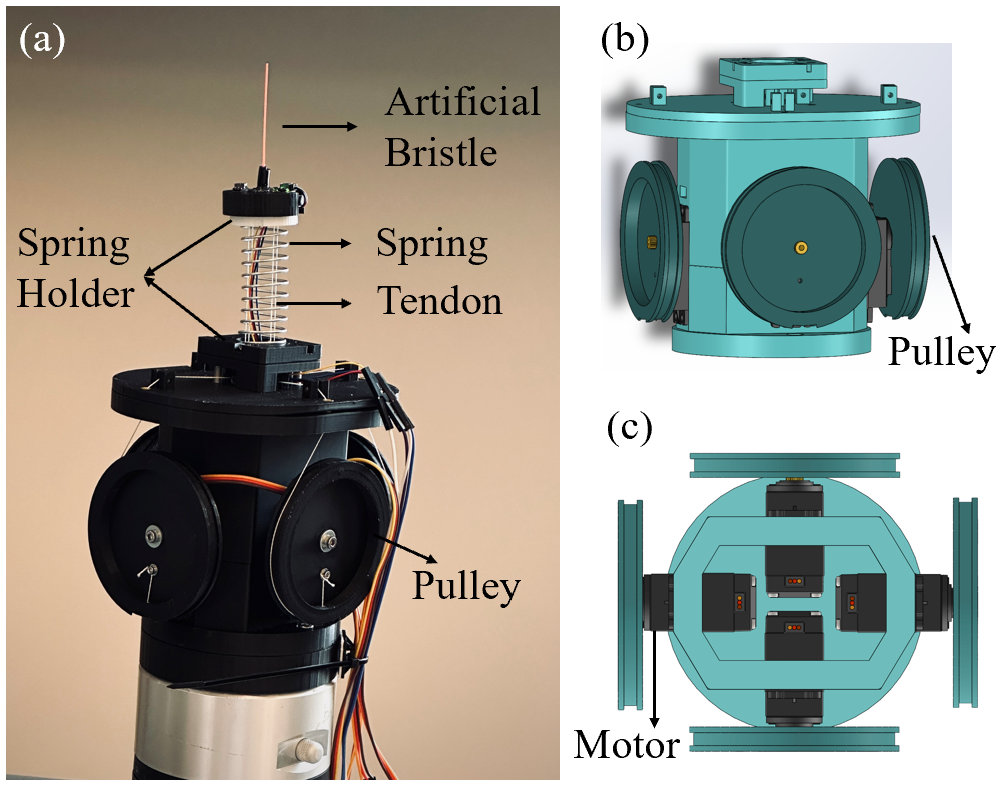
This work details the design, kinematic modeling, and experimental validation of a tendon-driven continuum robot featuring artificial bristles for obstacle detection and positioning accuracy of approximately 4.32mm.
Confined space exploration presents a persistent challenge for rigid robots due to limitations in maneuverability and adaptability. This is addressed in ‘Caterpillar-Inspired Spring-Based Compressive Continuum Robot for Bristle-based Exploration’, which introduces a novel tendon-driven continuum robot inspired by caterpillar locomotion. The system achieves positioning accuracy of approximately 4.32mm and integrates an artificial bristle sensor, enabling surface perception and exploration within constrained environments. Could this bio-inspired approach offer a cost-effective and versatile solution for inspection and manipulation in previously inaccessible spaces?
The Challenge of Confined Spaces: A Necessary Evolution
Conventional robotic systems, designed with rigid bodies and limited articulation, frequently encounter difficulties when operating in confined or cluttered spaces. These robots possess a restricted range of motion-a low degree of freedom-making it challenging to maneuver around obstacles and access tightly packed areas. Their inflexible structures are also prone to collisions with surrounding objects, potentially causing damage to both the robot and the environment. This susceptibility to impact, combined with the inability to reorient quickly, hinders their effectiveness in complex scenarios such as internal pipe inspection, search and rescue within collapsed structures, or delicate manipulation inside medical cavities. Consequently, a new generation of robots capable of navigating these challenging environments without human intervention is urgently needed.
Successfully operating within confined spaces necessitates a departure from conventional robotics principles. Traditional designs, optimized for open environments, prove unwieldy and prone to failure when tasked with navigating the tortuous paths of pipelines, the delicate interiors of medical cavities, or the unstable wreckage following a disaster. These environments demand robots capable of extreme dexterity, often requiring movement along multiple, complex axes, and the ability to conform to irregular geometries. Furthermore, the sheer inaccessibility of these spaces frequently precludes remote operation via direct line of sight, creating a pressing need for systems that can autonomously map their surroundings, plan trajectories, and manipulate objects with minimal external guidance – a fundamentally different approach to robotic design and control.
Existing robotic solutions for confined spaces frequently necessitate elaborate external infrastructure – bulky power supplies, extensive cabling, and precisely calibrated positioning systems – hindering their practicality in dynamic or remote environments. Furthermore, many current deployments still require significant human oversight, either for real-time control or to intervene when the robot encounters unforeseen obstacles or complexities. This reliance on human intervention not only limits operational efficiency but also introduces safety concerns in hazardous locations. Consequently, there is a pressing need for robotic systems capable of fully autonomous operation and intelligent adaptation to unstructured, unpredictable confined spaces, enabling them to perform inspections, manipulations, and even complex tasks without direct human guidance.

Biomimicry in Robotics: The Continuum Solution
Continuum robots differentiate themselves from traditional rigid-bodied robots through the adoption of highly flexible structures, drawing inspiration from biological systems such as the musculature of caterpillars and the skeletal structure of elephant trunks. This design approach enables a significantly increased degree of freedom and maneuverability, allowing these robots to navigate constrained environments and complex pathways inaccessible to conventional robots. The flexibility is achieved through the use of materials and designs that facilitate bending and deformation along multiple axes, resulting in robots capable of non-linear movements and adaptation to irregular surfaces. This biomimetic approach provides advantages in applications requiring access to tight spaces, delicate manipulation, and traversal of unpredictable terrains.
Tendon-driven actuation in continuum robots utilizes multiple flexible tendons running longitudinally within the robot’s structure; selective tensioning of these tendons causes the robot to bend and compress in specific directions. This is achieved through a system where each tendon, when pulled, shortens the robot’s effective length on one side, inducing curvature. By coordinating the tension applied to different tendons, complex 3D movements and navigation within constrained environments become possible. The method provides precise control over deformation, enabling traversal of narrow passages and manipulation of objects in cluttered spaces, a capability significantly exceeding that of traditional rigid-bodied robots.
The spring-based backbone is a core component in continuum robot design, typically consisting of a series of interconnected, flexible spines or coils. This architecture provides inherent flexibility, enabling the robot to bend and conform to various spatial constraints. Simultaneously, the spring material-often steel or specialized polymers-offers substantial structural integrity, resisting buckling and maintaining positional control during locomotion. The spring elements distribute applied forces, preventing stress concentrations and allowing for repeated bending without material fatigue. Variations in spring stiffness, geometry, and arrangement along the backbone enable precise tuning of the robot’s bending radius, range of motion, and load-bearing capacity, critical for navigating constrained environments and performing delicate manipulations.
Perception Through Touch: Enhancing Control in Confined Spaces
The robot utilizes an array of artificial bristles structurally integrated into its chassis to provide tactile sensing capabilities. These bristles function as distributed sensors, detecting physical contact with the surrounding environment. This allows the robot to perceive obstacles and characterize surface textures, providing crucial feedback for navigation and manipulation tasks. The tactile data generated by the bristles informs the robot’s control system, enabling it to adjust its movements and maintain stable interaction with surfaces, even in the absence of visual or other sensory input. The density and arrangement of the bristles are optimized to maximize sensitivity and coverage, contributing to robust performance in complex environments.
Robot pose and trajectory control is achieved by integrating tactile data from artificial bristles with a constant curvature kinematic model. This approach allows for precise movement, demonstrated by an average position error of 4.32 mm during operational testing. The constant curvature model simplifies the kinematic calculations required for accurate positioning, while the tactile feedback provides real-time adjustments to compensate for environmental factors and maintain desired trajectories. This integrated system enables the robot to navigate and interact with its surroundings with a quantifiable level of precision.
The robot utilizes surface reconstruction techniques to create 3D models of its surroundings based on data collected from integrated artificial bristles. This allows for enhanced environmental awareness and improved navigation and manipulation capabilities. Quantitative analysis indicates a positional error of 2.06 mm during pure compression movements, demonstrating the high degree of accuracy achieved when operating in constrained spaces and validating the efficacy of the tactile data integration and processing methods.

Expanding the Reach: Modular Design and Future Potential
Continuum robots achieve remarkable flexibility through design principles that prioritize adaptability and performance enhancement. A core element of this lies in the utilization of pneumatic actuation and concentric tube construction, where multiple flexible tubes nest within each other. This arrangement allows for bending and extension along multiple axes, mimicking natural movements and enabling access to highly constrained spaces. By varying the materials, diameters, and arrangement of these concentric tubes, engineers can precisely tailor a robot’s stiffness, range of motion, and load-bearing capacity. Furthermore, pneumatic control offers a lightweight and compliant actuation method, ideal for delicate interactions and navigating complex environments, while modular construction facilitates easy customization and repair, extending the robot’s operational lifespan and broadening its potential applications.
Magnetic-driven continuum robots present a compelling alternative to conventional actuation methods, particularly when navigating challenging or restricted environments. These robots utilize external magnetic fields to manipulate a flexible structure, eliminating the need for onboard motors, gears, or hydraulic systems within the robot itself. This design is advantageous in scenarios where space is limited, such as within the human body during minimally invasive surgery, or in environments inaccessible to traditional robotic arms – think narrow pipes, cluttered disaster zones, or even the exploration of subsurface ice. By precisely controlling external magnetic fields, researchers can effectively ‘steer’ the robot through complex pathways, offering a degree of maneuverability and access that is difficult to achieve with other technologies. The absence of internal moving parts also contributes to a simpler, potentially more reliable, and biocompatible design.
To extend the operational reach of continuum robots, researchers integrated the system with a Universal Robots UR16e robotic arm, effectively creating a positioning stage for enhanced access and broader coverage, particularly within constrained environments. This coupled robotic system demonstrated impressive stability and repeatability, achieving a standard deviation of just 2.73 mm during motion control. Crucially, the integration included a reliable contact detection mechanism, consistently triggered at a sensitive threshold of 15 hPa, allowing for nuanced interaction with the surrounding environment and preventing potential damage during complex maneuvers within tight spaces.

The design presented prioritizes function through deliberate simplification. The caterpillar-inspired robot achieves effective locomotion in constrained environments not through complex mechanisms, but through a carefully considered arrangement of spring-based components and tendon-driven actuation. This echoes a fundamental tenet of effective design: eliminate the unnecessary. As Marvin Minsky observed, “Questions are more important than answers.” The pursuit of answers – in this case, effective confined space exploration – is best served by first questioning the inherent complexities of traditional robotic designs. The resulting robot, with its emphasis on compressed bending and bristle-based obstacle detection, exemplifies how a reduction in complexity can yield surprisingly robust and capable results.
Where To Next?
This work establishes a foundation. Caterpillar-inspired robotics offer a clear path-but simplicity remains elusive. Current iterations prioritize kinematic control. Future work must address dynamic stability. A 4.32mm positioning error is… acceptable, for now. But true exploration demands finer resolution.
The artificial bristle is a pragmatic solution. Yet, reliance on a single sensor introduces fragility. Redundancy is not extravagance; it is engineering. More robust sensing modalities-perhaps integrating tactile or chemical sensors-will broaden operational scope. Abstractions age, principles don’t.
Every complexity needs an alibi. The tendon-driven system, while effective, presents mechanical challenges. Alternative actuation methods-dielectric elastomers, shape memory alloys-warrant investigation. The goal isn’t merely to mimic biological locomotion. It is to distill the essence of adaptable movement.
Original article: https://arxiv.org/pdf/2603.09745.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- ‘Project Hail Mary’s Unexpected Post-Credits Scene Is Worth Sticking Around
- Beyond Accuracy: Gauging Trust in Human-AI Teams
- Gold Rate Forecast
- Clash Royale Balance Changes March 2026 — All Buffs, Nerfs & Reworks
- The most surprising Hannah Montana cameos: From John Cena to Dwayne Johnson and even a Coronation Street soap star as show celebrates its 20th anniversary
- Genshin Impact Version 6.5 Leaks: List of Upcoming banners, Maps, Endgame updates and more
- eFootball 2026 is bringing the v5.3.1 update: What to expect and what’s coming
- Total Football free codes and how to redeem them (March 2026)
- Brawl Stars Brawl Cup Pro Pass arrives with the Dragon Crow skin and Chroma, unique cosmetics, and more rewards
- We talked to ‘Bachelorette’ Taylor Frankie Paul. Then reality hit pause on her TV career
2026-03-11 14:12