Unfolding ESMFold: How AI Predicts Protein Shapes
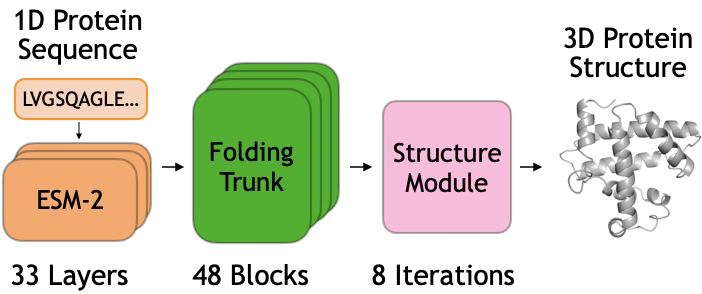
New research sheds light on the inner workings of the ESMFold model, revealing the computational steps behind its remarkable ability to predict protein structures.
New research sheds light on the inner workings of the ESMFold model, revealing the computational steps behind its remarkable ability to predict protein structures.
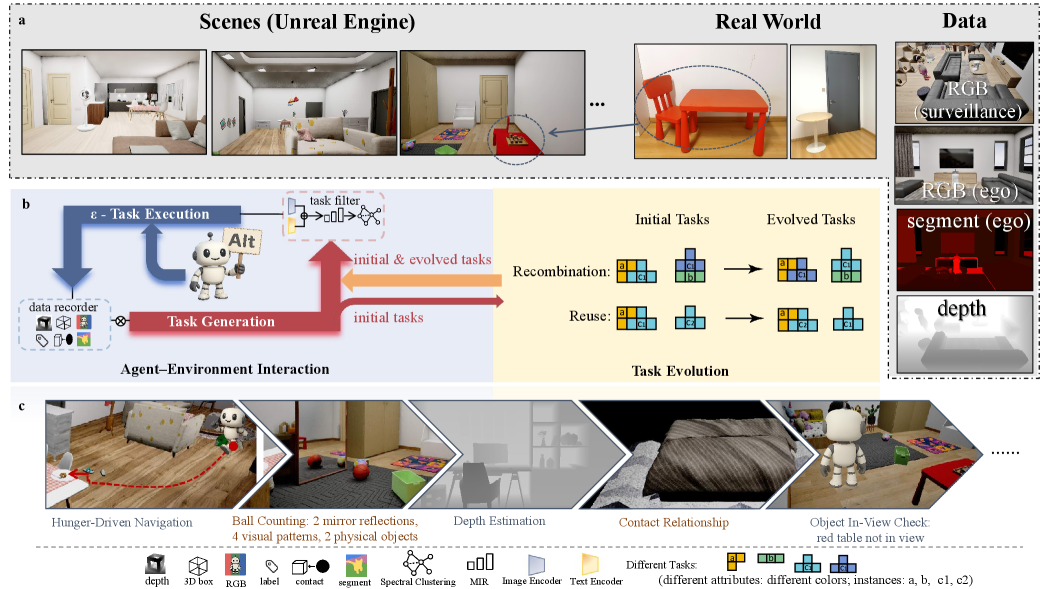
New research reveals a significant gap between AI performance on standard benchmarks and its ability to handle complex, real-world tasks in 3D environments.
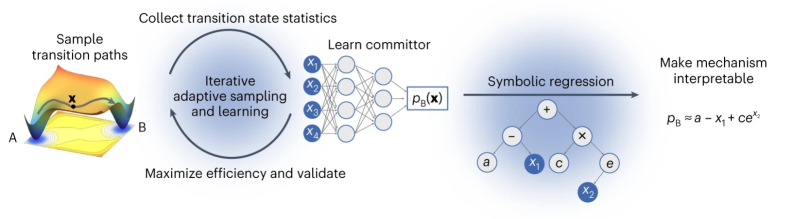
A new approach combines path sampling with artificial intelligence to automatically identify key molecular pathways and dramatically speed up the study of infrequent, yet crucial, events.
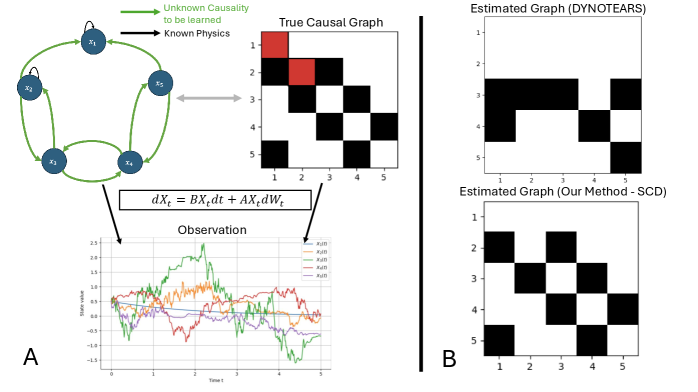
A new approach leverages physical laws to unlock causal relationships hidden within complex, changing data streams.
![The autonomous system demonstrates graceful navigation within a dense pedestrian environment by aligning with prevailing flow-initially tracking forward movement and subsequently adapting to avoid opposing groups-achieving continued, safe progress as evidenced by its trajectory between [latex]t=4[/latex] and [latex]t=17[/latex].](https://arxiv.org/html/2602.05608v1/figure/robot_poster_image.png)
A new framework allows robots to navigate crowded environments by predicting pedestrian movement and aligning with natural flow.
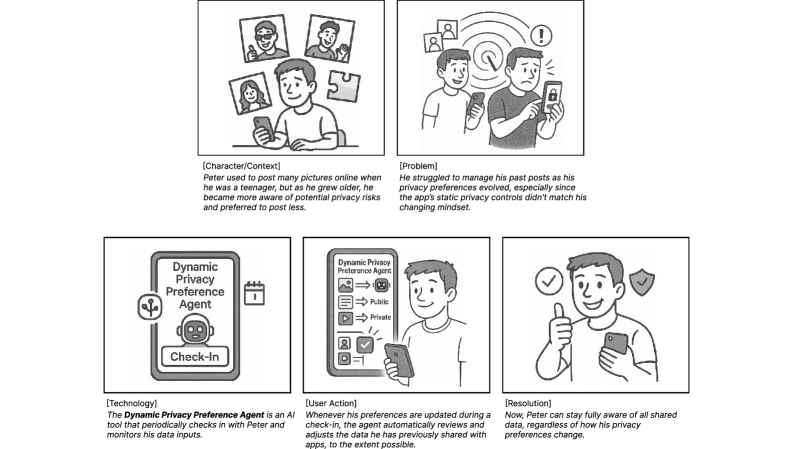
New research explores how AI-powered tools can move beyond pre-sharing privacy controls to dynamically manage personal data and respect evolving preferences across digital interactions.
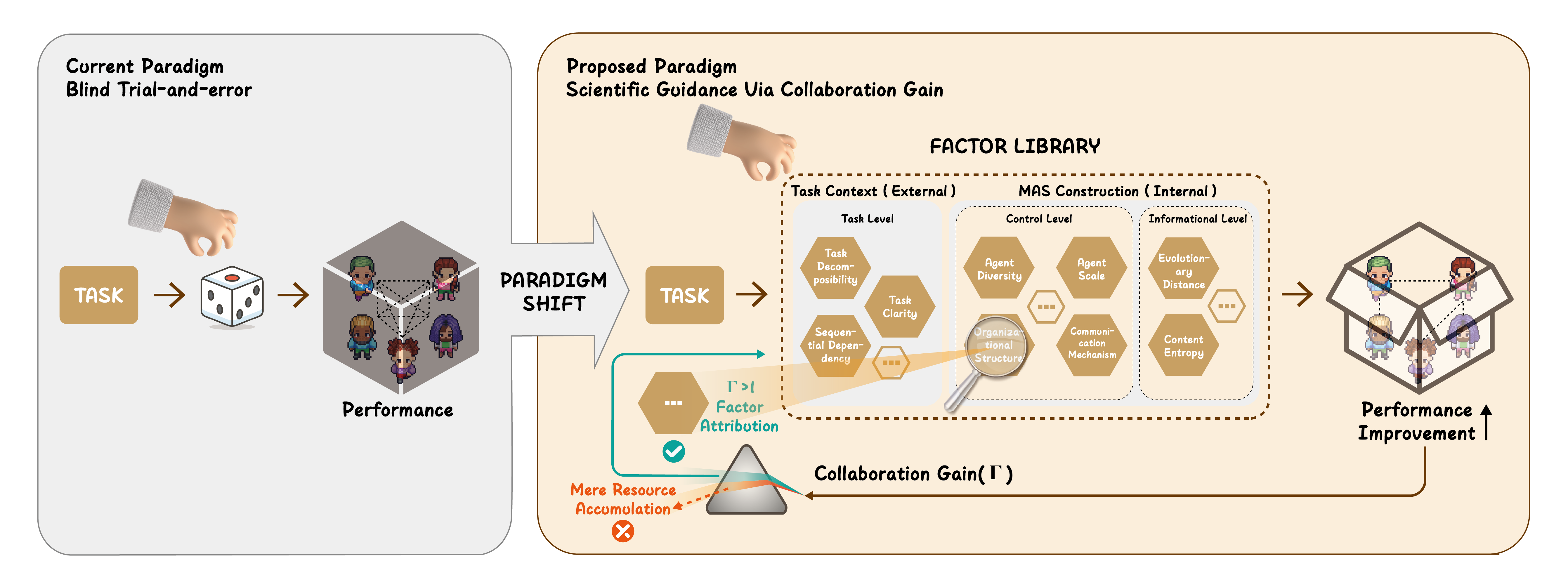
As AI agents increasingly collaborate, researchers are shifting focus from simply observing emergent behavior to establishing a science for understanding and maximizing the benefits of teamwork.
New research explores how deploying teams of ground robots, enhanced by artificial intelligence, can dramatically improve the effectiveness of urban search and rescue operations.
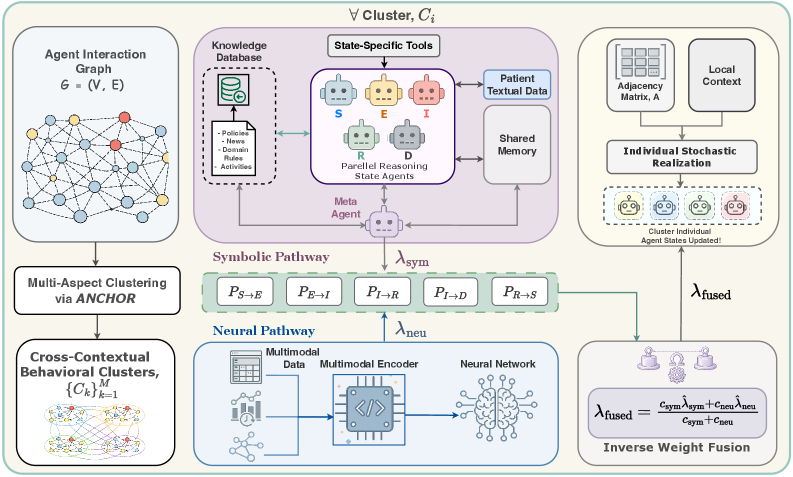
A new framework combines the power of artificial intelligence with agent-based modeling to create more accurate and scalable simulations of dynamic systems.
Researchers have developed a new framework enabling robots to more effectively and intuitively hand objects to humans, even when faced with unfamiliar tasks or items.