Scalable Soft Manipulation: The MANTA-RAY Platform
![The MANTA-RAY platform demonstrates multi-object target reaching capabilities through both hardware implementation and simulation on a [latex]3 \times 3 \times 3[/latex] modular configuration, extending to single-object reach on a smaller [latex]2 \times 2 \times 2[/latex] platform-a scalable architecture hinting at inherent limitations as complexity increases.](https://arxiv.org/html/2601.21884v1/figs/target/sim3x3.png)
Researchers have developed a modular, deformable surface that enables adaptable and distributed grasping of multiple objects with a surprisingly low number of actuators.
Researchers have developed a modular, deformable surface that enables adaptable and distributed grasping of multiple objects with a surprisingly low number of actuators.
A new data-driven approach defines the operational limits for artificial intelligence systems crucial to safety-critical applications.
Researchers have developed a new agent-based model capable of replicating urban mobility patterns across diverse American cities using a unified parameter set.
New research reveals that the way AI planning problems are modeled dramatically affects energy consumption, raising concerns about the environmental impact of increasingly complex algorithms.
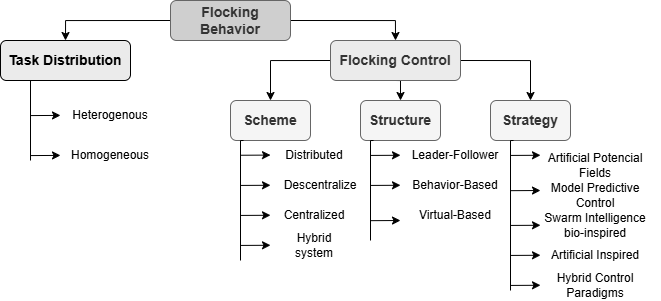
A new algorithm allows multi-robot systems to maintain complex formations and coordinated movements by focusing control on the swarm’s center of gravity.

Researchers have developed a novel model that reasons about user behavior chains to provide transparent and insightful recommendations.

Researchers now have access to a comprehensive resource for understanding how mental effort impacts human performance when working alongside robots in industrial settings.
![The proposed LLaMEA-SAGE method establishes a framework for leveraging large language models to enhance state estimation, effectively integrating learned priors with measurement updates to refine system understanding and improve predictive accuracy, as formalized by [latex] \hat{x}_{t} = f(x_{t-1}, u_{t}, z_{t}) [/latex], where [latex] \hat{x}_{t} [/latex] represents the estimated state at time <i>t</i>, informed by prior state [latex] x_{t-1} [/latex], control input [latex] u_{t} [/latex], and measurement [latex] z_{t} [/latex].](https://arxiv.org/html/2601.21511v1/x1.png)
A new approach combines the power of large language models with explainable AI to create better, more robust algorithms automatically.
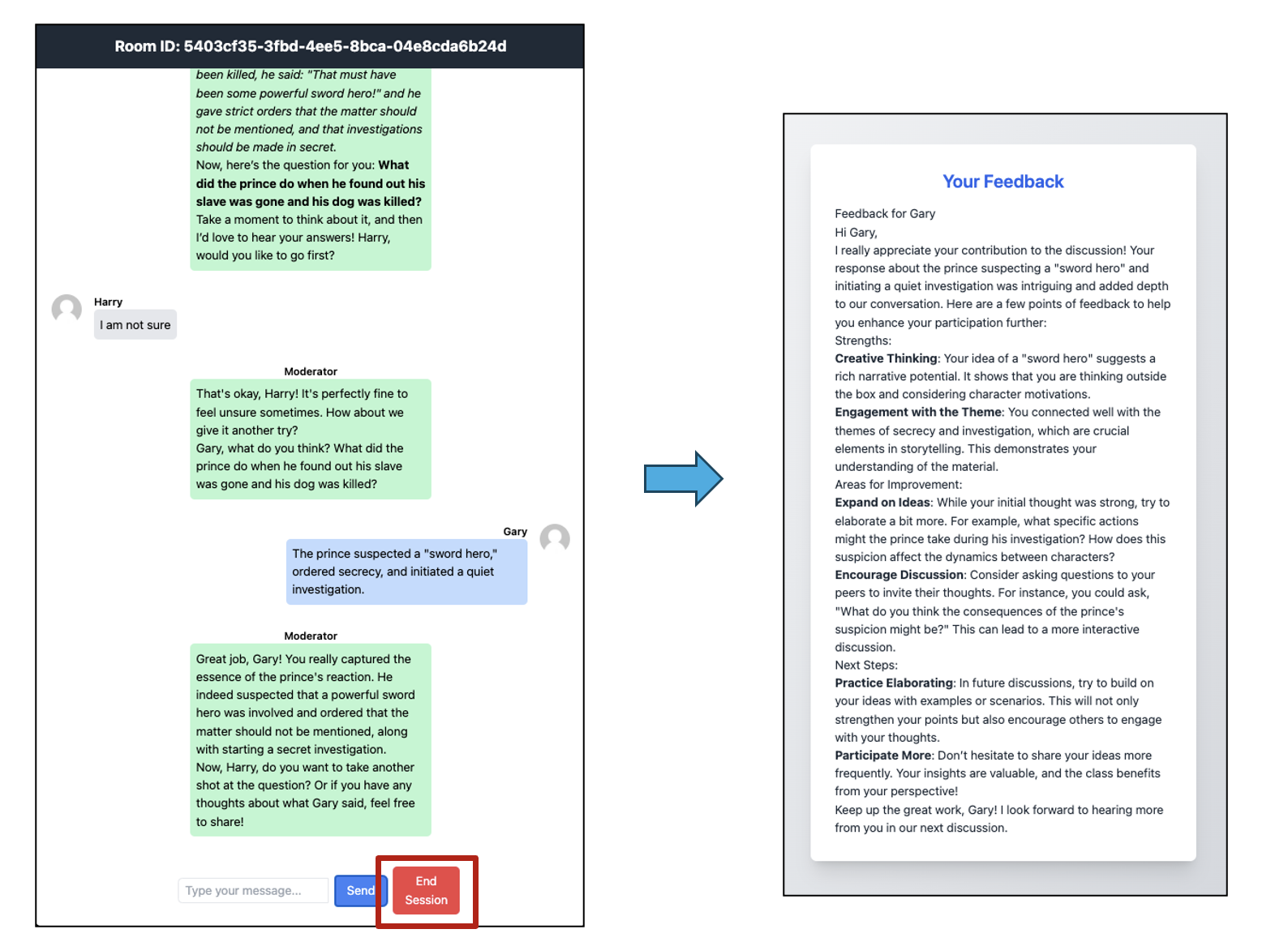
A new framework harnesses the power of advanced artificial intelligence to create dynamic and personalized learning experiences for students.
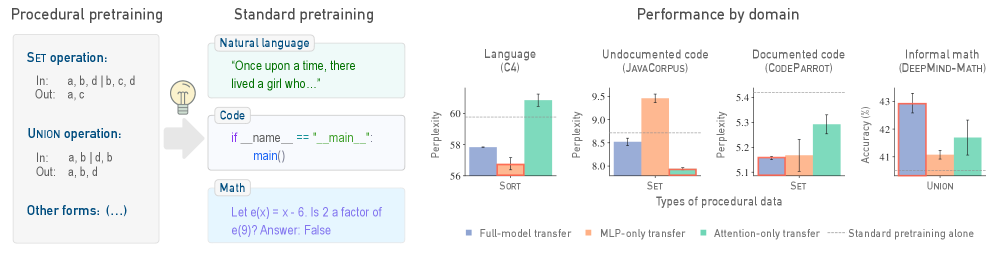
A new study reveals that pretraining language models on abstract procedural data significantly improves their ability to tackle complex tasks and learn more efficiently.