Robots That Find Their Own Tools: Planning with Uncertainty
A new framework allows robots to dynamically search for missing objects while planning complex tasks, boosting reliability in unpredictable environments.
A new framework allows robots to dynamically search for missing objects while planning complex tasks, boosting reliability in unpredictable environments.
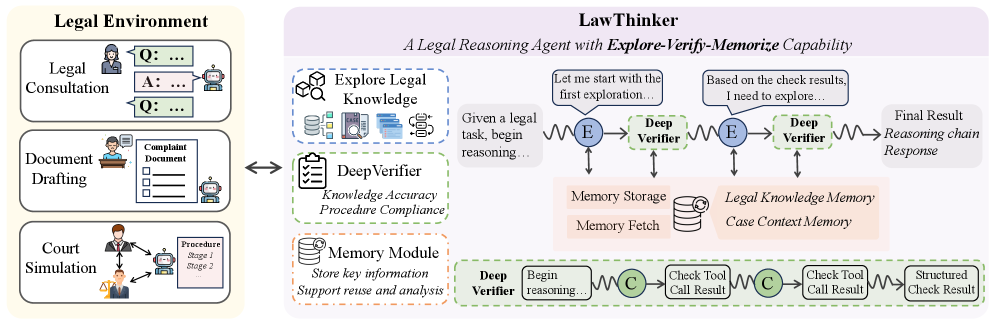
Researchers have developed an autonomous agent, LawThinker, designed to conduct deep legal research and reasoning within the complex and ever-changing landscape of judicial proceedings.
![Hierarchical imitation learning faces limitations as task complexity increases due to the demands of one-to-one supervision and operator fatigue, but this is overcome by an automated approach-AGPS-which utilizes [latex]FLOAT[/latex] as an asynchronous trigger to monitor policy performance and, upon detecting deviations, recalls memory and leverages action primitives, perception, and geometric reasoning to provide action guidance for trajectory correction and exploration pruning for spatial constraint.](https://arxiv.org/html/2602.11978v1/x1.png)
A new framework leverages intelligent agents to automate robot training, overcoming the bottlenecks of traditional reinforcement learning methods.
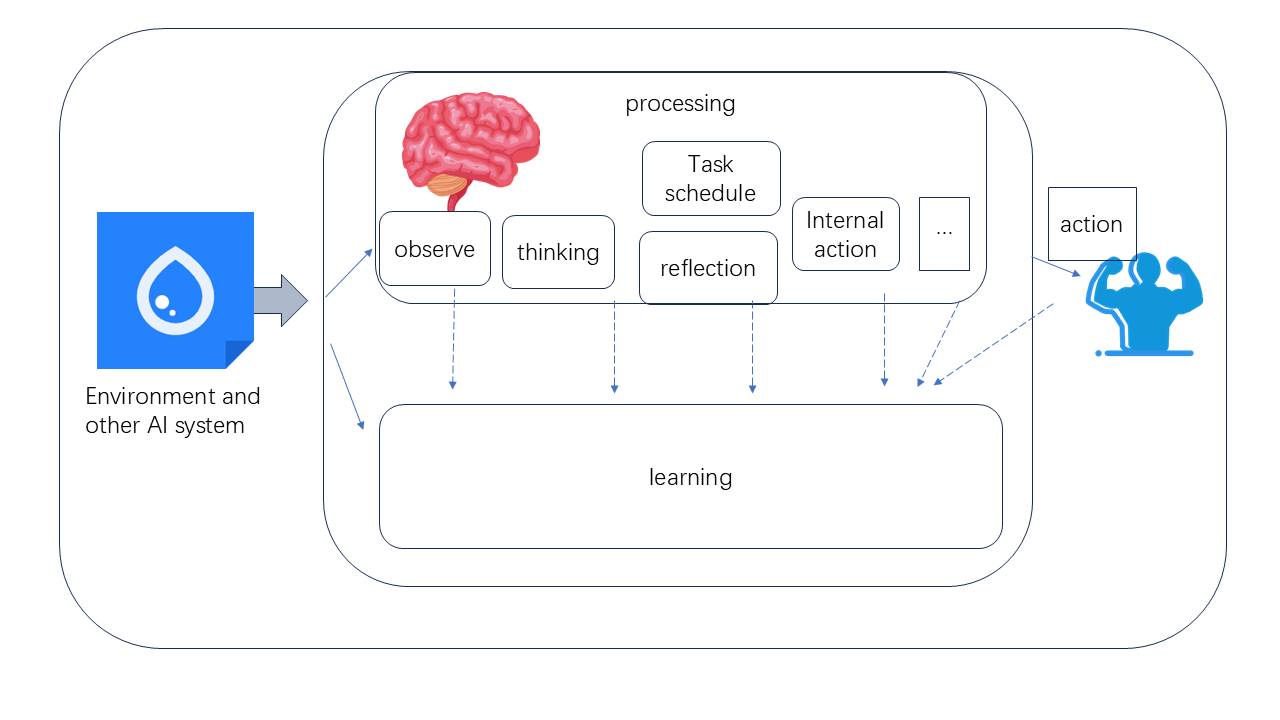
A new framework aims to imbue artificial intelligence with the ability to adapt not just its knowledge, but also the very processes it uses to reason and solve problems.
New research explores how intelligent, embodied AI agents can improve collaboration and learning in hands-on workplaces.
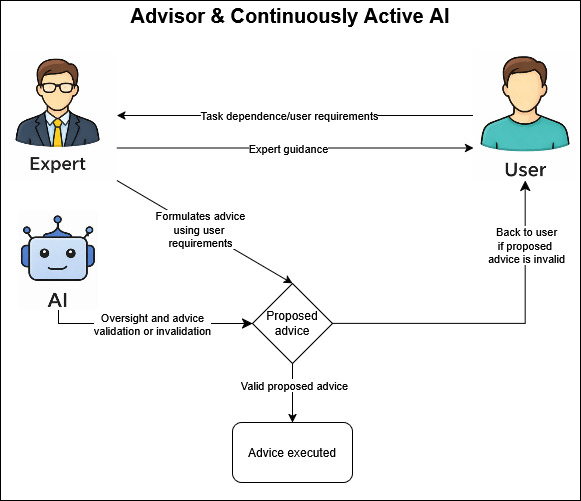
New research reveals that trust in AI-assisted advice isn’t just about accuracy, but crucially depends on who-human or machine-corrects any mistakes.
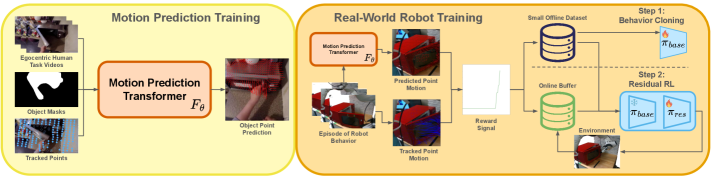
A new approach allows robots to learn complex tasks by understanding and anticipating the movements humans make during demonstrations.
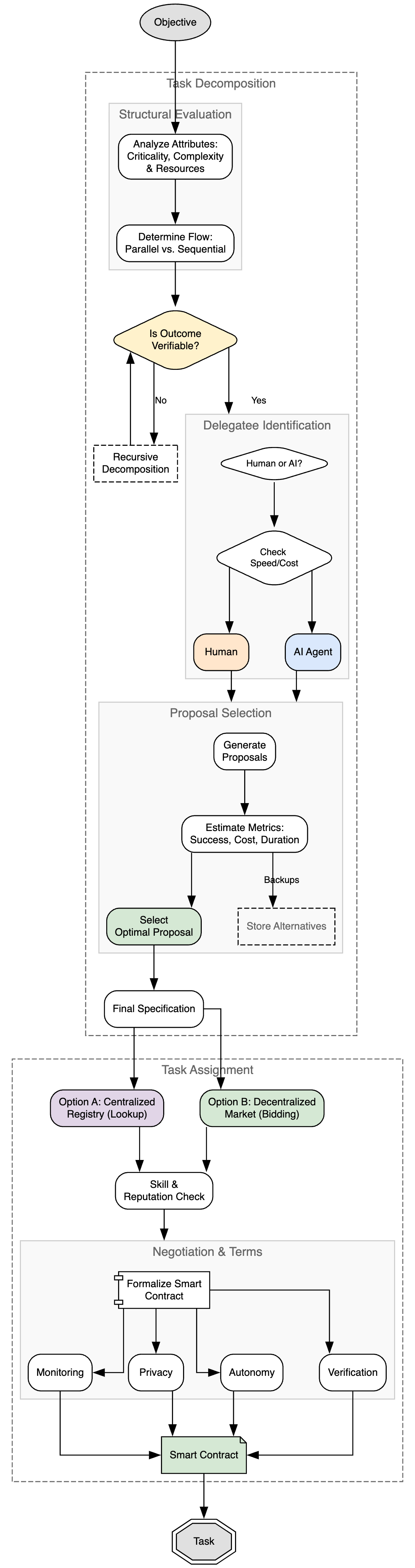
A new framework is emerging to enable AI agents to collaboratively tackle complex tasks with verifiable trust and adaptive coordination.
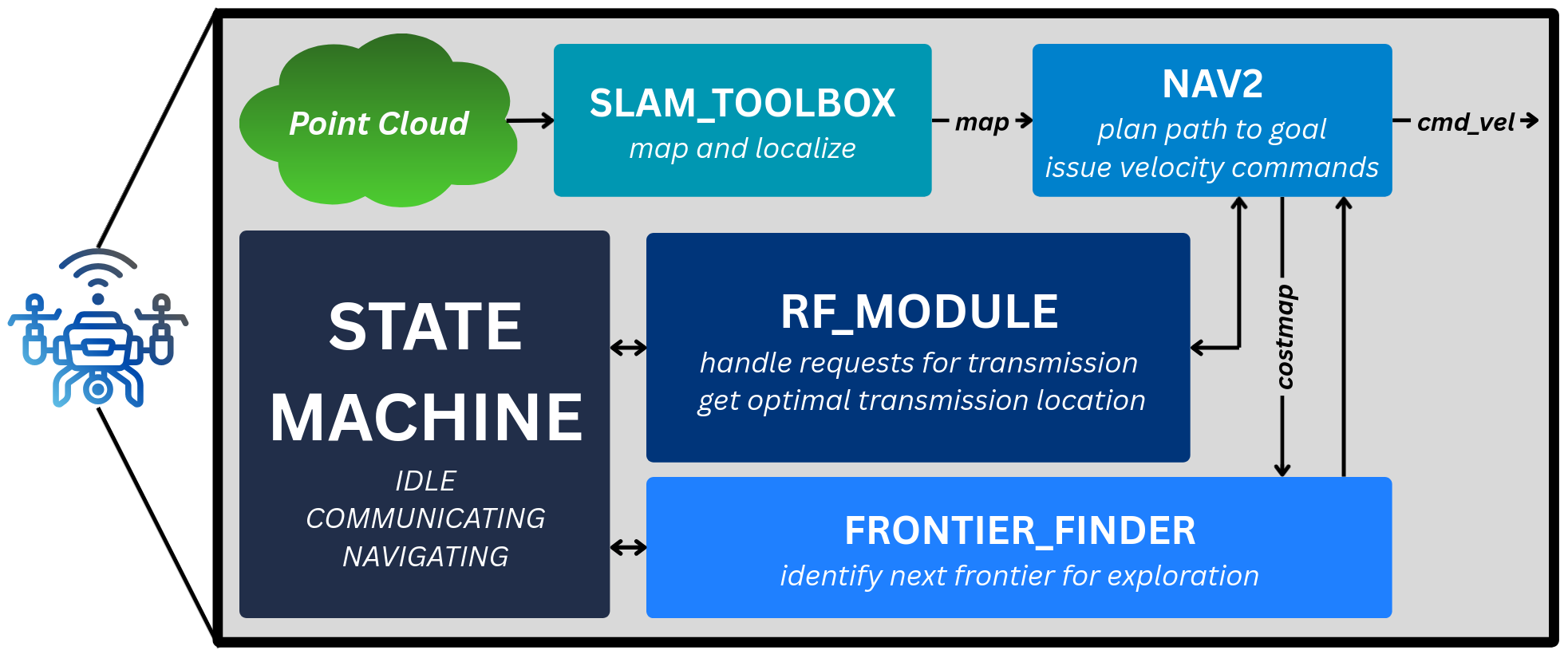
New research demonstrates how coordinating movement with radio signal strength allows teams of robots to map complex environments more efficiently.
![The replication of the box generator, denoted as [latex] g_{box} [/latex], confirms the consistency and robustness of the foundational system established in Figure 1.](https://arxiv.org/html/2602.12270v1/box.png)
As generative AI reshapes creative landscapes, a fundamental challenge arises: how do we define and protect ownership in a world of algorithmically-derived art?